

Практическая работа
Цель работы: изучение особенностей практического использования алгебраических критериев Гурвица и Рауса, а также частотных критериев Михайлова, Найквиста и логарифмического критерия для анализа динамики линейных САУ. В процессе выполнения работы студент/курсант обязан выполнить следующие пункты:
1. Вывести характеристическое уравнение исследуемой САУ, взяв схему САУ и параметры передаточных функций согласно своему варианту задания (необходимо исследовать либо САУ управления скоростью двигателя, либо следящую систему).
2. Теоретически рассчитать устойчивость
САУ методом Гурвица. Используя матрицу
Гурвица, рассчитать значение коэффициента
![]() ,
при котором САУ находится на границе
устойчивости.
,
при котором САУ находится на границе
устойчивости.
3. Теоретически рассчитать устойчивость САУ методом Рауса.
4. При помощи MatLab(SciLab)
построить годограф Михайлова, оценить
устойчивость САУ по критерию Михайлова.
Экспериментально определить значение
коэффициента![]() ,
при котором САУ находится на границе
устойчивости. Сравнить полученное
значение с рассчитанным в п. 2.
,
при котором САУ находится на границе
устойчивости. Сравнить полученное
значение с рассчитанным в п. 2.
5. При помощи MatLab(SciLab)
построить годограф Найквиста для
разомкнутой САУ, оценить устойчивость
САУ в замкнутом состоянии по критерию
Найквиста. Экспериментально определить
значение коэффициента![]() ,
при котором САУ находится на границе
устойчивости. Сравнить полученное
значение с рассчитанным в п. 2.
,
при котором САУ находится на границе
устойчивости. Сравнить полученное
значение с рассчитанным в п. 2.
6. При помощи MatLab(SciLab)
построить ЛАЧХ и ЛФЧХ, оценить устойчивость
САУ, используя логарифмический критерий.
По логарифмическим характеристикам
экспериментально определить значение
коэффициента![]() ,
при котором САУ находится на границе
устойчивости. Сравнить полученное
значение с рассчитанным в п. 2.
,
при котором САУ находится на границе
устойчивости. Сравнить полученное
значение с рассчитанным в п. 2.
7.
Подавая на вход единичное скачкообразное
воздействие, зарисовать переходные
процессы в системе при исходных
параметрах, используя ЭВМ и приложение
MatLab(SciLab).
Отдельно получить переходные процессы
при значении коэффициента![]() ,
соответствующем границе устойчивости.
На экран графического монитора выводить
входной, выходной сигналы и ошибку.
Рассчитать показатели качества системы.
,
соответствующем границе устойчивости.
На экран графического монитора выводить
входной, выходной сигналы и ошибку.
Рассчитать показатели качества системы.
Содержание отчета
Отчет о работе должен содержать:
Титульный лист.
Цель работы.
Структурная схема САУ.
Исследование устойчивости САУ по критерию Гурвица. Расчет коэффициента
 .
.Исследование устойчивости САУ по критерию Рауса.
Исследование устойчивости САУ по критерию Михайлова. График годографа Михайлова. Экспериментальное определение коэффициента
 для границы устойчивости.
для границы устойчивости.Исследование устойчивости САУ по критерию Найквиста. График годографа Найквиста. Экспериментальное определение коэффициента
 для границы устойчивости.
для границы устойчивости.Исследование устойчивости САУ логарифмическим методом. Графики ЛАЧХ и ЛФЧХ. Экспериментальное определение коэффициента
 для границы устойчивости.
для границы устойчивости.Графики переходной характеристики, входного сигнала и ошибки. График переходной характеристики для значения коэффициента
 ,
соответствующего границе устойчивости.
Расчет показателей качества.
,
соответствующего границе устойчивости.
Расчет показателей качества.
Варианты заданий
Задание 1. Стабилизация скорости вращения ДПТ
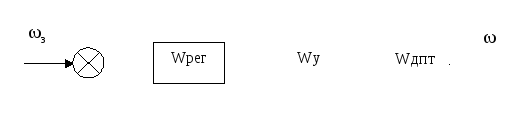
Рис. 57. Структурная схема стабилизации скорости вращения ДПТ НВ
Таблица 15
Передаточные функции регуляторов
|
Регулятор |
П |
И |
Пи |
|
ПФ
регулятора
|
|
|
|
Устройство усиления имеет передаточную
функцию
![]() .
.
Таблица 16
Передаточные функции двигателя
|
ПФ |
1 |
2 |
|
ПФ ДПТНВ по скорости |
|
|
Таблица 17
Список вариантов заданий
|
№ |
Регулятор |
|
|
|
|
ПФ ДПТНВ |
|
|
|
|
1 |
П |
1 |
|
6 |
0,2 |
2 |
0,81 |
0,15 |
0,03 |
|
2 |
И |
0,5 |
|
5 |
0,03 |
1 |
0,73 |
|
0,04 |
|
3 |
Пи |
2 |
0,5 |
6 |
0,04 |
1 |
0,9 |
|
0,02 |
|
4 |
П |
5 |
|
5 |
0,05 |
2 |
0,75 |
0,12 |
0,02 |
|
5 |
И |
1 |
|
6 |
0,04 |
1 |
0,85 |
|
0,02 |
|
6 |
Пи |
1 |
0,5 |
5 |
0,05 |
1 |
0,72 |
|
0,03 |
Задание 2. Следящая система
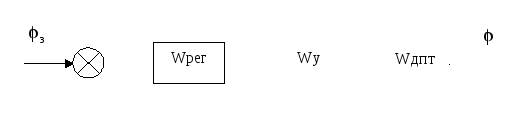
Рис. 58. Структурная схема следящей системы стабилизации положения ДПТ НВ
Таблица 18
Передаточные функции регуляторов
|
Регулятор |
П |
И |
Пи |
|
ПФ
регулятора
|
|
|
|
Устройство усиления имеет передаточную
функцию
![]() .
.
Таблица 19
Передаточные функции ДПТ по положению
|
ПФ |
1 |
2 |
|
ПФ ДПТНВ по положению |
|
|
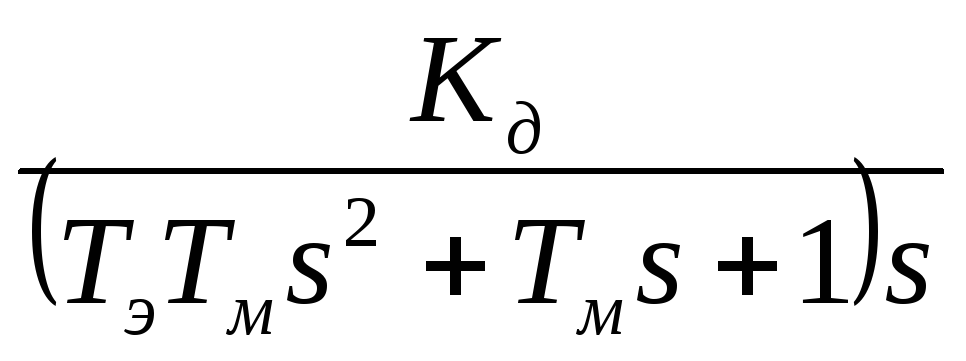
Таблица 20
Список вариантов заданий
|
№ |
Регулятор |
|
|
|
ПФ ДПТНВ |
|
|
|
|
1 |
П |
2 |
|
6 |
2 |
0,83 |
0,16 |
0,03 |
|
2 |
И |
2 |
|
5 |
1 |
0,74 |
|
0,03 |
|
3 |
Пи |
2 |
0,1 |
6 |
1 |
0,81 |
|
0,03 |
|
4 |
П |
5 |
|
5 |
2 |
0,84 |
0,1 |
0,02 |
|
5 |
И |
2 |
|
6 |
1 |
0,8 |
|
0,02 |
|
6 |
Пи |
2 |
0,5 |
5 |
1 |
0,85 |
|
0,03 |