

Контрольные вопросы
Что понимают под устойчивостью САУ в малом и в большом?
Какой вид имеет решение уравнения динамики САУ?
Как найти вынужденную составляющую решения уравнения динамики САУ?
Какой вид имеет свободная составляющая решения уравнения динамики САУ?
Что такое характеристическое уравнение?
Какой вид имеют корни характеристического уравнения?
Чем отличаются правые и левые корни характеристического уравнения?
Сформулируйте условие устойчивости систем по Ляпунову.
Что такое граница устойчивости?
Что такое критерии устойчивости?
Сформулируйте необходимое условие устойчивости САУ.
Сформулируйте критерий Гурвица.
В чем достоинства и недостатки алгебраических критериев устойчивости?
Что называется частотными критериями устойчивости САУ?
В чем преимущество частотных критериев устойчивости перед алгебраическими?
Сформулируйте критерий устойчивости Михайлова.
Сформулируйте критерий устойчивости Найквиста.
В чем особенность использования критерия Найквиста для астатических САУ?
Какие САУ считаются структурно устойчивыми и структурно неустойчивыми?
В каком квадранте уходит в бесконечность АФЧХ разомкнутой САУ, если порядок астатизма равен трем? Является ли такая САУ структурно устойчивой в замкнутом состоянии?
Как сделать устойчивой структурно неустойчивую САУ?
Что называется запасом устойчивости по модулю?
Что называется запасом устойчивости по фазе?
Как влияет коэффициент усиления САУ на запасы устойчивости?
Чему соответствуют на АФЧХ пересечение ЛАЧХ оси ?
Чему соответствуют на АФЧХ пересечение ЛФЧХ значения = –?
Что называется частотой среза?
Сформулируйте критерий Найквиста для логарифмических характеристик.
Глава7. Комплексное исследование сау
7.1. Представление сау в векторно-матричной
Форме (state space)
Наряду с передаточной функцией имеется еще одна форма представления САУ, называемая векторно-матричной формой представления (state-space). Базой для такого представления является описание системы автоматического управления в форме Коши. Матрично-векторная форма позволяет упростить описание системы и значительно уменьшить громоздкость. Описание в векторно-матричной форме представляет собой запись в виде системы матричных уравнений и выглядит следующим образом:
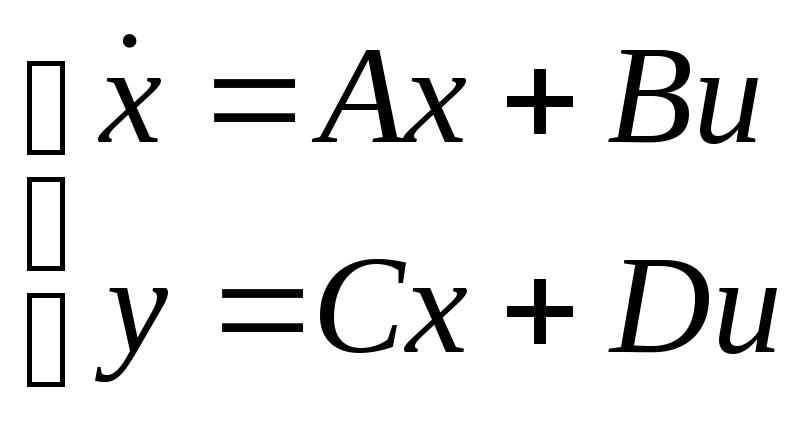 , (39)
, (39)
где x– вектор переменных состояния системы размеромnx1 (n– порядок (размерность) системы, соответствует количеству переменных в левой части записи формы Коши);
A– квадратная матрица коэффициентов перед переменными состояния размерностьюn x n;
B– матрица размерностьюn x m, соответствующая коэффициентам перед входными переменными в системе уравнений;
u– вектор входных переменных, соответствующих входным сигналам системы размерностьюmx1 (m– количество входных сигналов);
y– вектор выходных и входных переменных, определяемых исследователем для анализа системы размерностьюyx1 (например, анализируем скорость двигателя, опуская ток, – значит, размерностьyопределяется как 1x1; добавив к анализируемым переменным ток в якорной цепи, определим размерность как 2x1; добавив входное напряжение, получим размерность);
C– матрица размерностьюyxn, содержащая нули либо единицы, определяющая, какие из переменных состояния мы будем выбирать для анализа системы;
D– матрица размерностьюyxm, содержащая нули либо единицы, определяющая какие из входных переменных мы будем использовать для анализа.
Очевидно, что второе уравнение в системе (39) является искусственным и полностью определяется исследователем.
Рассмотрим пример получения матрично-векторной записи. Рассмотрим в качестве примера систему, структурная схема которой изображена на рис. 59. Структуру схемы образуют два интегрирующих звена, соединенных последовательно и охваченных отрицательной обратной связью.
Для перехода к векторно-матричной форме необходимо описать систему в виде дифференциальных уравнений в форме Коши.
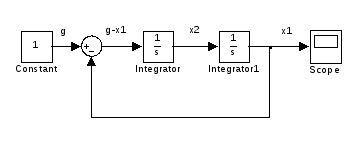
Рис. 59. Структурная схема системы
Описание в виде формы Коши будет выглядеть следующим образом:
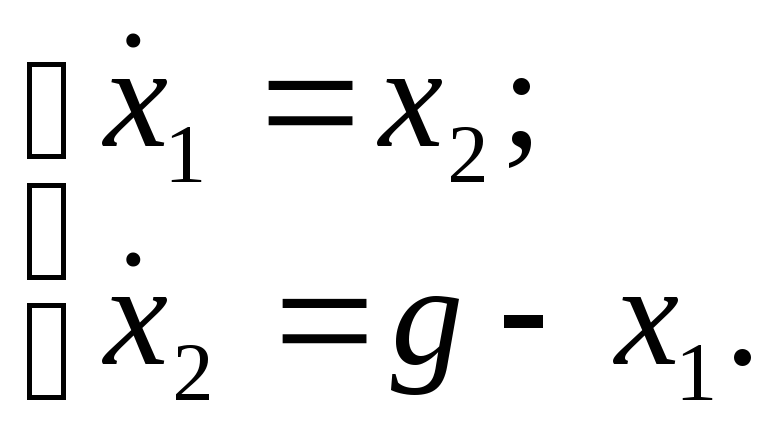 . (40)
. (40)
Определим матрицы и векторы для описания:
![]() – вектор переменных состояния системы
размером 2 х 1;
– вектор переменных состояния системы
размером 2 х 1;
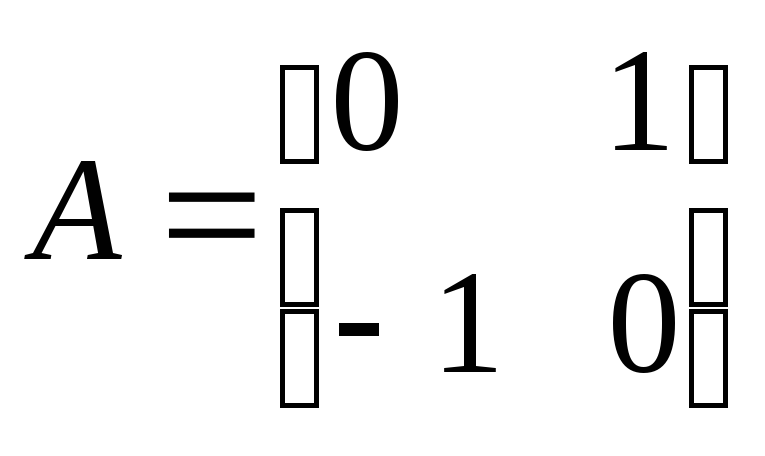 – матрица коэффициентов в уравнении
системы размерностью 2 х 2;
– матрица коэффициентов в уравнении
системы размерностью 2 х 2;
![]() – вектор размерностью 1 х 1 (скаляр),
характеризующий входной сигналg;
– вектор размерностью 1 х 1 (скаляр),
характеризующий входной сигналg;
![]() – матрица размерностью 2 х 1, характеризующая
коэффициенты перед входными переменными
(в данном случаеg);
– матрица размерностью 2 х 1, характеризующая
коэффициенты перед входными переменными
(в данном случаеg);
В качестве исследуемых переменных будем использовать x1иx2. Поэтому определим составляющие второго уравнения следующим образом:
![]() – вектор анализируемых переменных;
– вектор анализируемых переменных;
![]() – матрица коэффициентов перед выходными
анализируемыми переменными;
– матрица коэффициентов перед выходными
анализируемыми переменными;
 – матрица коэффициентов перед выходными
анализируемыми переменными.
– матрица коэффициентов перед выходными
анализируемыми переменными.
Таким образом, осталось проверить правильность описания в векторно-матричной форме (соответствие исходной системе, описанной в форме Коши):
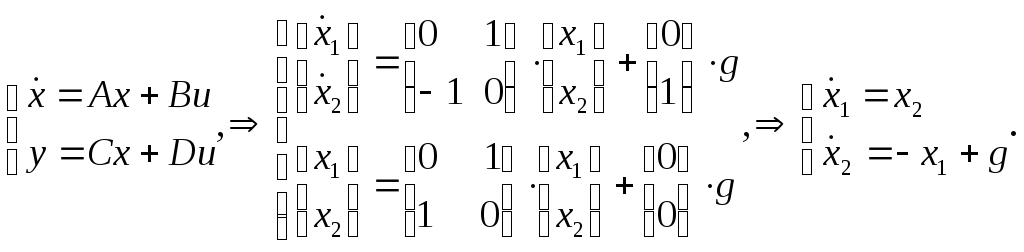
Как видим, получившаяся система уравнений целиком и полностью соответствует исходной системе (40). Следовательно, матрицы и векторы заданы правильно.
Получившееся описание можно использовать для моделирования в средах MatLabиSciLab. Набор команд для задания системы и получения реакции на ступенчатое воздействие выглядит следующим образом:
A=[0 1; -1 0]
A =
0 1
-1 0
>> B=[0; 1]
B =
0
1
>> C=[1 0; 0 1]
C =
1 0
0 1
>> D=[0;0]
D =
0
0
>> sys1=ss(A,B,C,D)
a =
x1 x2
x1 0 1
x2 -1 0
b =
u1
x1 0
x2 1
c =
x1 x2
y1 1 0
y2 0 1
d =
u1
y1 0
y2 0
step(sys1)
В результате выполнения данного набора команд будут построены графики отклика на ступенчатое воздействие (рис. 60).
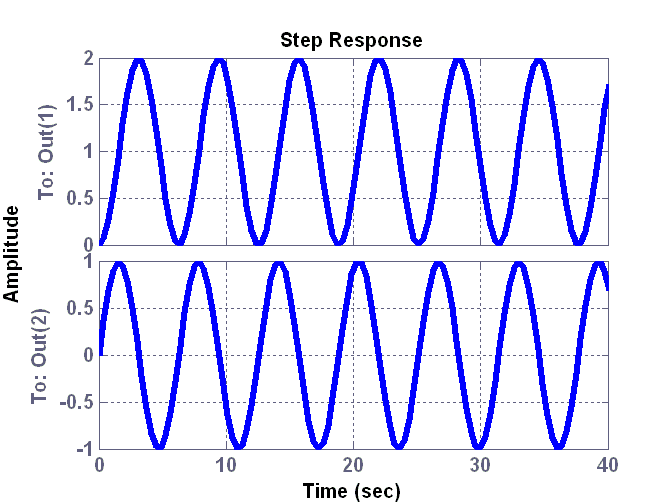
Рис. 60. Графики реакции на ступенчатое воздействие
Набор команд для приложения SciLabобеспечивает построение графикаx1:
-->A=[0 1; -1 0]
A =
0. 1.
- 1. 0.
-->B=[0; 1]
B =
0.
1.
-->C=[1 0]
C =
1. 0.
-->S1=syslin('c',A,B,C)
-->t=0:0.05:15;
-->plot2d([t',t'],[(csim('step',t,S1))',0*t'])
В результате выполнения набора команд будет построен график x1– реакции системы на ступенчатое единичное воздействие (рис. 61).

Рис. 61. График реакции системы на ступенчатое воздействие в SciLab