

9.5. Построение графиков
Для построения графиков функций одной переменной y = f(x) имеется функция plot. График строится в декартовой системе координат по заданным массивам значений аргумента и функции. Заданные этими массивами точки соединяются прямыми линиями. Имеется возможность изменять тип и цвет линии и тип узловых точек (маркер). Вызов этой функции осуществляется командой
plot(x,y,s)
в случае, если необходимо построить один график, или
plot(x1, y1, s1, x2, y2, s2,...xn, yn, sn)
для n графиков.
x, y – одномерные массивы одинаковой размерности; x – массив значений аргумента функции у=f(x); y – массив значений функции у=f(x); s – строковая константа, определяющая цвет линии, маркер узловых точек и тип линии. Эта константа может содержать от одного до трех символов.
Строка s выглядит следующим образом:
'параметр1параметр2параметр3'.
Символы пишутся один за другим без разделителей.
Параметр 1 определяет цвет линии графика (табл. 23).
Таблица 23
Значения параметра, определяющего цвет
|
Символ |
Описание |
Символ |
Описание |
|
y |
желтый |
g |
зеленый |
|
m |
розовый |
b |
синий |
|
с |
голубой |
w |
белый |
|
r |
красный |
k |
черный |
Параметр 2 определяет тип маркера графика (табл. 24).
Таблица 24
Определение типа маркеров графика
|
Символ |
Описание |
|
. |
точка |
|
o |
кружок |
|
х |
крестик |
|
+ |
знак "плюс" |
|
* |
звездочка |
|
S |
квадрат |
Окончание табл. 24
|
Символ |
Описание |
|
d |
ромб |
|
v |
треугольник вершиной вниз |
|
^ |
треугольник вершиной вверх |
|
< |
треугольник вершиной влево |
|
> |
треугольник вершиной вправо |
|
p |
пятиконечная звезда |
|
h |
шестиконечная звезда |
Параметр 3 определяет тип линии графика (табл. 25).
Таблица 25
Определение типа линии графика
|
Символ |
Описание |
Символ |
Описание |
|
- |
сплошная |
-. |
штрихпунктирная |
|
: |
пунктирная |
-- |
штриховая |
Пример MatLab
% графики функций sin x, cos x
x=0:0.1:2*pi;
y1=sin(x);
y2=cos(x);
plot(x,y1,'k-o',x,y2,'r--*')
В результате выполнения этой программы на экран монитора будет выведено графическое окно с графиками (см. рис. 70). Графики представлены в черно-белой палитре, хотя в действительности график функции cos(x) выводится красным цветом.
9.6. Изображение сетки в графической области
Для изображения сетки в MatLabследует воспользоваться функцией
grid on
Для изображения сетки в SciLabследует воспользоваться функцией
xgrid(color),
где color — аргумент функции, определяющий цвет линий сетки. Общий вид аргумента a1a2a3, где каждый из параметров а1, а2 и а3 может принимать два значения – 0 или 1. Параметр а1 определяет наличие (при а1=1) или отсутствие (при а1=0) красной составляющей в цвете линии, а2 – зеленой и а3 – синей. Различные комбинации значений этих параметров позволяют получать различные цвета. Например, в результате вызова функции xgrid(100) в графической области будет отображена сетка красного цвета. Значения параметров следует вводить подряд без разделителей.
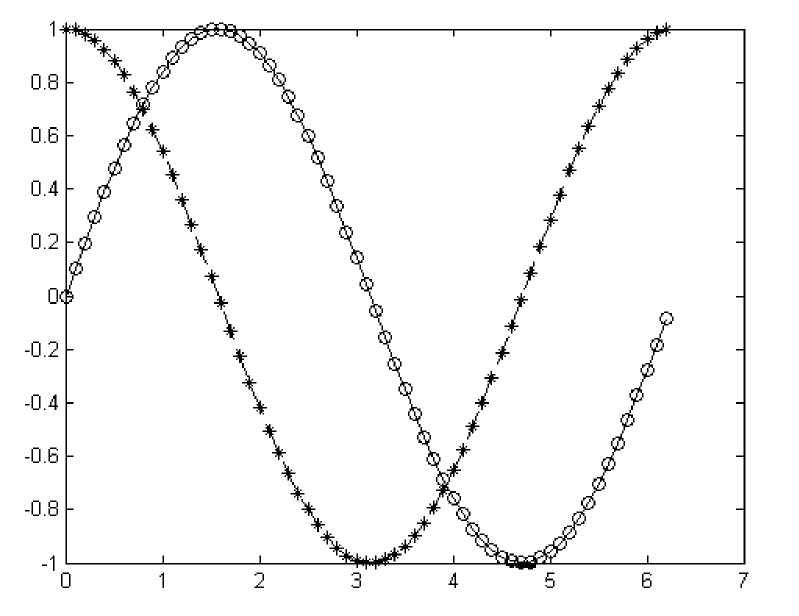
Рис. 70. Графики, выполненные с помощью программы plot