

2.2. Типовые динамические звенья
Типовые динамические звенья (ТДЗ) – совокупность элементарных, универсальных математических функций, наиболее часто используемых при построении динамических моделей реальных объектов. Как правило, уравнения, описывающие работу ТДЗ в динамике, определяются в виде передаточных функций, связывающих входной и выходной сигналы звеньев (см. рис. 4). Это существенно упрощает и унифицирует описание различных динамических объектов, которые можно представить в виде ТДЗ. Обычно передаточные функции записываются не для временного представления, а для представления Лапласа, связывая в этом варианте не сигналы (т. е. не функции времени), а их изображения.
Основные типовые динамические звенья и их передаточные функции приведены в табл. 3.
Таблица 3
Типовые динамические звенья
|
№ |
Название звена |
Передаточная функция |
|
1 |
Усилительное (пропорциональное, безынерционное) |
|
|
|
Звенья 1-го порядка |
|
|
2 |
Интегрирующее |
|
|
3 |
Дифференцирующее (идеальное) |
|
|
4 |
Апериодическое звено 1-го порядка (инерционное) |
|
|
5 |
Форсирующее звено 1-го порядка |
|
|
|
Звенья 2-го порядка |
|
|
6 |
Апериодическое звено 2-го порядка |
|
|
7 |
Колебательное |
|
|
8 |
Консервативное |
|
|
9 |
Форсирующее звено 2-го порядка |
|
|
|
Дополнительные звенья |
|
|
10 |
Дифференцирующее реальное (дифференцирующее звено с замедлением) |
|
|
11 |
Изодромное (пропорционально-интегральное звено) |
|
|
12 |
Интегрирующее звено с замедлением |
|
2.3. Временные характеристики динамических звеньев
Временные характеристики определяют вид изменения выходного сигнала при подаче на вход звена типового управляющего воздействия. Это позволяет сравнивать свойства звеньев в динамических режимах работы. Временные свойства звена определяются его переходной и импульсной переходной характеристиками.
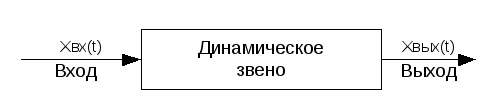
Рис. 4. Представление ТДЗ
Основной временной функцией, используемой в качестве типового управляющего воздействия, является единичная ступенчатая функция (функция Хэвисайда), заданная условиями
![]() .(7).
.(7).
Для автоматических систем 1(t) является распространенным видом входного воздействия. Как правило, подобные воздействия сопровождают процессы включения систем и вызывают переходы от одного установившегося состояния к другому.
Переходная функция или характеристика
![]() – переходный процесс на выходе линейной
системы, возникающий при подаче на вход
единичной ступенчатой функции
– переходный процесс на выходе линейной
системы, возникающий при подаче на вход
единичной ступенчатой функции![]() .
.
Для систем без интеграторов переходная
характеристика
![]() .
Переходная характеристика системы с
дифференцирующим звеном (числитель
передаточной функции имеет нуль в точке
.
Переходная характеристика системы с
дифференцирующим звеном (числитель
передаточной функции имеет нуль в точке![]() )
стремится к нулю. Если система содержит
интегрирующие звенья, переходная
характеристика бесконечно возрастает.
)
стремится к нулю. Если система содержит
интегрирующие звенья, переходная
характеристика бесконечно возрастает.
Предельное значение переходной функции
![]() при
при![]() есть статический коэффициент усиления
есть статический коэффициент усиления![]() .
.
По переходной характеристике можно найти важнейшие показатели качества системы: перерегулирование (overshoot), время переходного процесса (settling time), колебательность, степень затухания (рис. 5). Показатели качества – это свойства, характеризующие работу системы, выраженные в количественной форме.
Перерегулирование – величина, равная отношению первого максимального отклоненияxмуправляемой величиныx(t)от ее установившегося значенияx()к этому установившемуся значению:
![]() (8)
(8)
К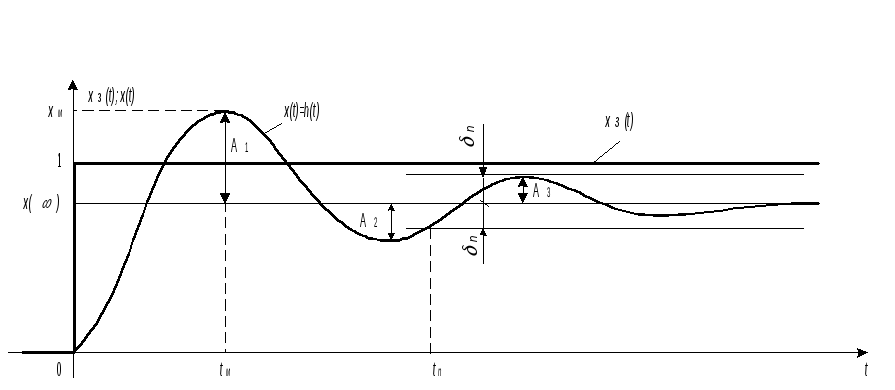 ачество
управления считается удовлетворительным,
если перерегулирование не превышает
30 – 40 %.
ачество
управления считается удовлетворительным,
если перерегулирование не превышает
30 – 40 %.
Рис. 5. К определению показателей качества системы
Степень затухания
![]() (9)
(9)
Интенсивность затухания колебаний в системе считается удовлетворительной, если = 0,75–0,95.
Время переходного процесса (время регулирования) tп – интервал времени от момента приложения ступенчатого воздействия до момента, после которого отклонения управляемой величиныx(t)от ее нового установившегося значенияx()становятся меньше некоторого заданного числап, т. е. до момента, после которого выполняется условиеx(t) - x()п.
В промышленной автоматике величину побычно принимают равной 5 % от установившегося значенияx() п = 0,05 x().
Колебательность N – число переходов управляемой величиныx(t)через ее установившееся значениеx()за время переходного процессаtп.
Кроме ступенчатого сигнала часто в
качестве типового управляющего
воздействия используют, так называемую,
дельта-функцию Дирака. Дельта-функция
Дирака
![]() – математическая функция, заданная
условиями:
– математическая функция, заданная
условиями:
![]() . (10)
. (10)
Иначе говоря,
![]() – это импульс с бесконечно большой
амплитудой и бесконечно малым временем
длительности, площадь которого равна
1. Для автоматических систем является
менее распространенным видом входного
воздействия, чем единичная ступенчатая
функция.
– это импульс с бесконечно большой
амплитудой и бесконечно малым временем
длительности, площадь которого равна
1. Для автоматических систем является
менее распространенным видом входного
воздействия, чем единичная ступенчатая
функция.
Из определений функций
![]() и
и![]() очевидна связь между ними:
очевидна связь между ними:
![]() ,
,![]() . (11)
. (11)
Единичная ступенчатая функция 1(t)
легка для практической реализации с
высокой точностью, а дельта-функцию
Дирака![]() реализовать сложнее. Для теоретического
описания систем и их моделирования ее
можно грубо представить с помощью двух
ступенчатых функций:
реализовать сложнее. Для теоретического
описания систем и их моделирования ее
можно грубо представить с помощью двух
ступенчатых функций:
![]() , (12)
, (12)
где N–
амплитуда функций;![]() – время, на которое запаздывает вторая
ступенчатая функция, при этом
– время, на которое запаздывает вторая
ступенчатая функция, при этом![]() и
и ![]() .
.
Результат воздействия дельта-функции
на САУ в виде переходного процесса на
выходе ТДЗ или линейной системы называется
функцией веса и обозначается как
![]() .
Поскольку получить дельта-функцию
довольно сложно, в качестве нее можно
рассматривать короткий импульс достаточно
высокого уровня.
.
Поскольку получить дельта-функцию
довольно сложно, в качестве нее можно
рассматривать короткий импульс достаточно
высокого уровня.
Для соответствующих типовых реакций:
![]() ,
,![]() . (13)
. (13)
Поскольку
![]() ,
в случае, когда входное воздействие
,
в случае, когда входное воздействие![]() представляет собой единичный импульсδ(t),и с
учетом того, что его изображение по
ЛапласуL{δ(t)}=1,
получим следующее выражение для
изображения функции веса звена:
представляет собой единичный импульсδ(t),и с
учетом того, что его изображение по
ЛапласуL{δ(t)}=1,
получим следующее выражение для
изображения функции веса звена:
![]() .
(14)
.
(14)
Таким образом, функция веса определяется через передаточную функцию по формуле обратного преобразования Лапласа, т.е. является ее оригиналом.
В случае, когда
![]() ,
учитывая, чтоL{1(t)}=1/s, получаем
следующее выражение для изображения
переходной характеристики:
,
учитывая, чтоL{1(t)}=1/s, получаем
следующее выражение для изображения
переходной характеристики:
![]() .(15)
.(15)
Следовательно, переходная характеристика звена
![]() .(16)
.(16)