

Практическая работа
Целью практической работы является комплексное исследование систем автоматического управления, заданных изначально в виде структурной схемы. Комплексный анализ подразумевает вывод различных форм представления систем (векторно-матричная форма, дифференциальные уравнения в форме, передаточная функция), исследование устойчивости систем, исследование динамики систем. Для выполнения пунктов исследования, предполагающих использование ЭВМ, использовать приложение MatLab(Simulink), либоSciLab.
Задание
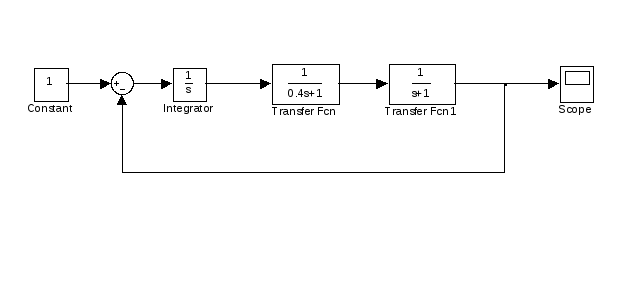
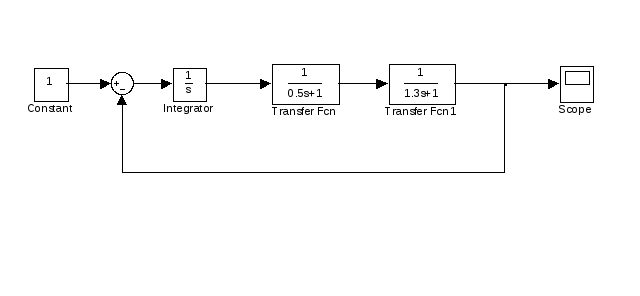
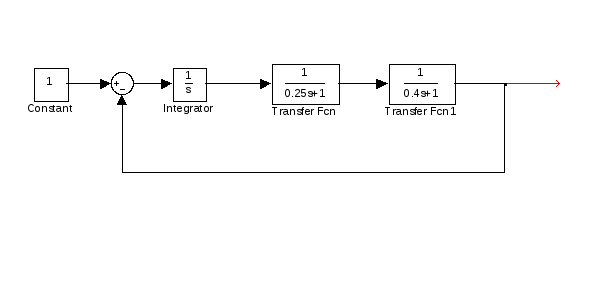
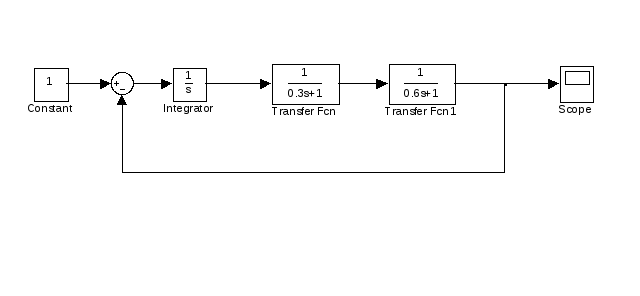
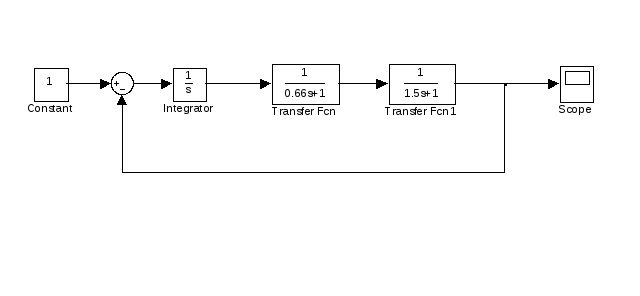
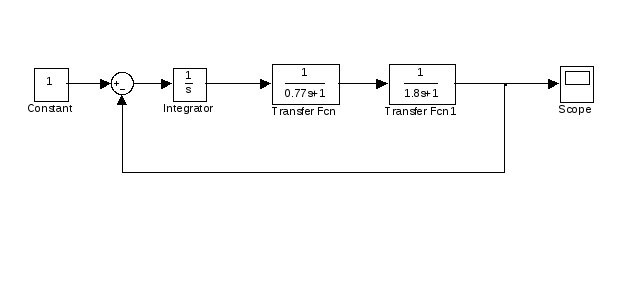
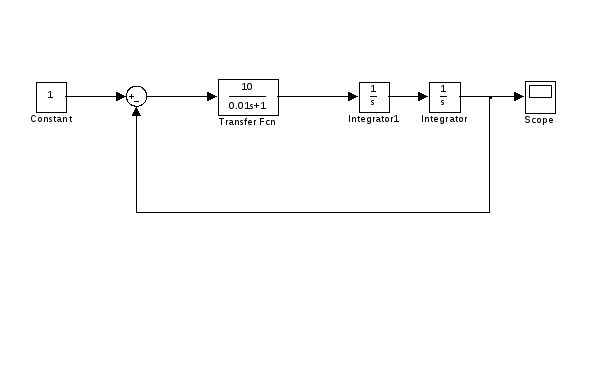
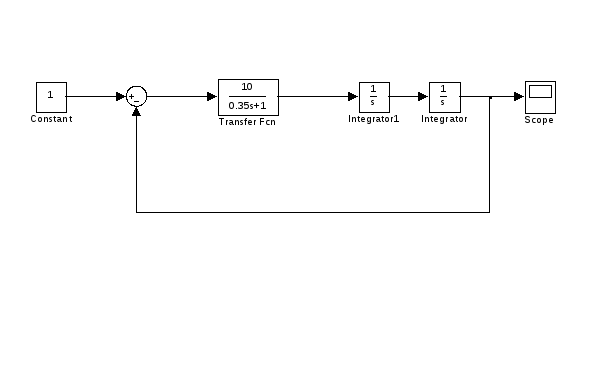
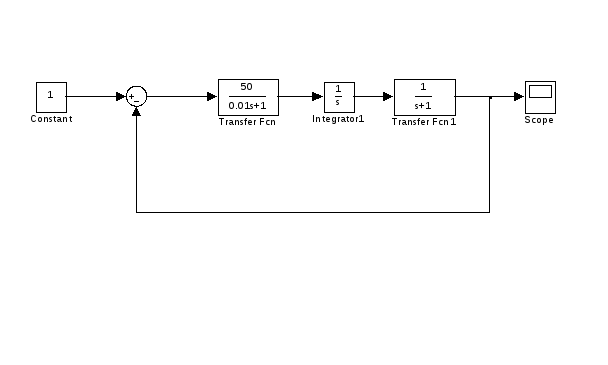
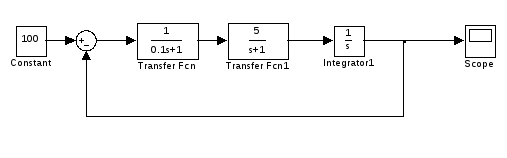
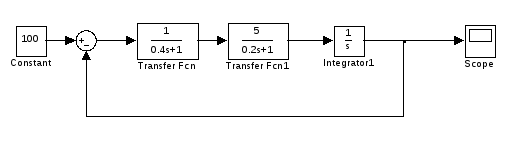
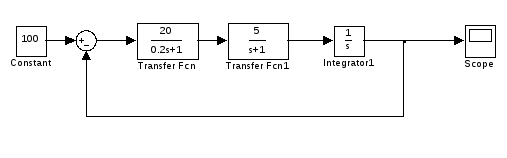
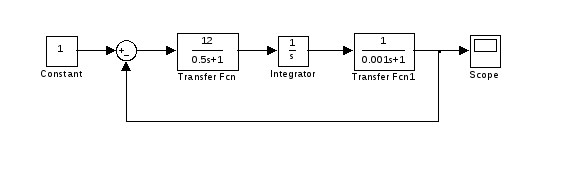
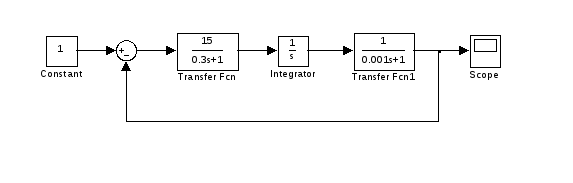
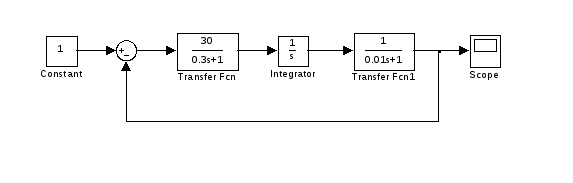
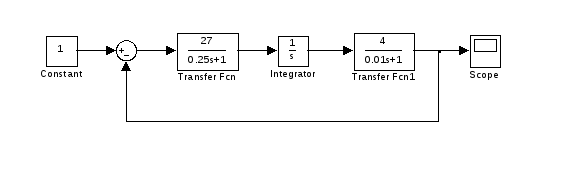
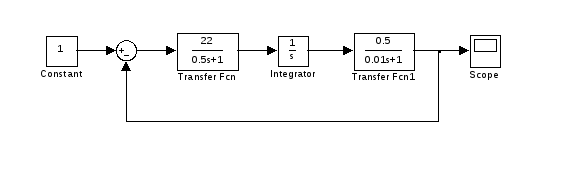
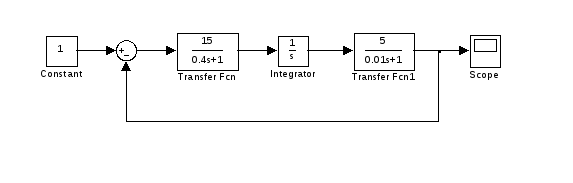
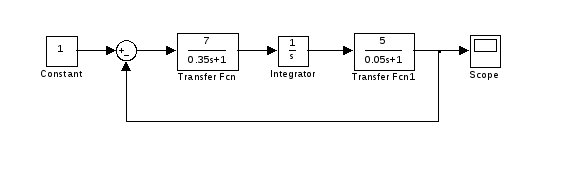
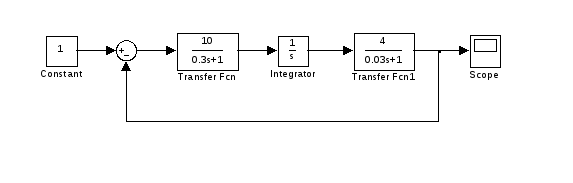
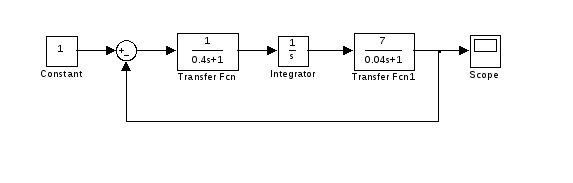
Выбрать систему автоматического управления, заданную структурной схемой, согласно варианту.
Вывести передаточные функции разомкнутой и замкнутой системы, характеристическое уравнение замкнутой системы.
Описать САУ в виде системы дифференциальных уравнений.
Описать САУ в векторно-матричной форме (statespace).
Вывести уравнения и построить АЧХ и ФЧХ для одного из апериодических звеньев (на выбор), входящих в состав системы.
ЭВМ. Реализовать систему в приложении xcos(simulink), получить временные характеристики замкнутой системы при воздействии ступенчатого сигнала.
ЭВМ. Реализовать систему с помощью скрипта SciLab(MatLab), задать передаточную функцию с помощью функцииsyslin(аргументsyslin– передаточная функция), получить временные характеристики для замкнутой системы, а также частотные характеристики разомкнутой системы: годограф Найквиста, ЛАЧХ и ЛФЧХ.
ЭВМ. Реализовать систему с помощью скрипта SciLab, задать передаточную функцию с помощью функцииsyslin(аргументsyslin– матрицыstate-space), получить временные характеристики для замкнутой системы.
Рассчитать динамические показатели качества системы, используя временные характеристики замкнутой системы (переходный процесс).
Оценить устойчивость системы по критериям Гурвица, Рауса, Найквиста, Михайлова, логарифмическому критерию.
Все результаты поместить в отчет. Представить отчет на проверку. Отчет должен содержать:
передаточные функции замкнутой и разомкнутой систем и характеристическое уравнение замкнутой системы;
запись системы в виде дифференциальных уравнений;
запись системы в виде statespace;
вывод и построение АЧХ и ФЧХ;
схема xcosи временные характеристики;
скрипты для записи передаточной функции и statespaceс временными и частотными характеристиками;
расчет показателей качества на основе временной характеристики переходного процесса;
оценки устойчивости с соответствующими выводами.
Варианты заданий
Вариант 1
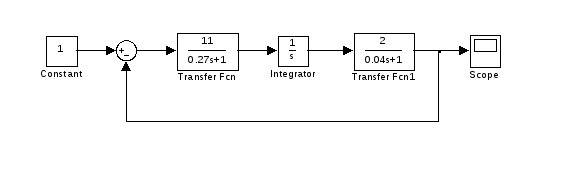
Вариант 2
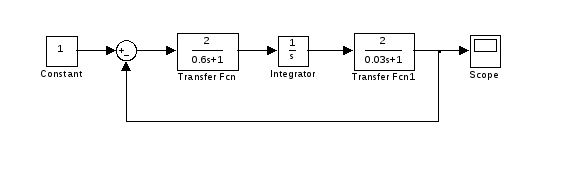
Вариант 3
Вариант 4
Вариант 5

Вариант 6
Вариант 7
Вариант 8
Вариант 9
Вариант 10
Вариант 11
Вариант 12
Вариант 13
Вариант 14
Вариант 15
Вариант 16
Вариант 17
Вариант 18
Вариант 19
Вариант 20
Вариант 21
Вариант 22
Вариант 23
Вариант 24

Вариант 25

Вариант 26
Глава8. Исследование точности сау. Коррекция
Статических и динамических свойств сау
8.1. Точность сау
Коррекция статических и динамических свойств САУ имеет своей целью повышение статической и динамической точности отработки системой задающего воздействия (или парирование возмущающего воздействия), повышение запасов ее устойчивости.
Для типовой САУ, структурная схема которой показана на рис. 49 (с. 88), точность по отношению к задающему воздействию характеризуется величиной ошибки управления
![]()
Статической системой по отношению к
задающему воздействию называется такая
система, установившаяся ошибка которой
при отработке постоянного воздействия
x(t) = 1(t)постоянна и отличается
от нуля (![]() ).
).
Системой с астатизмом 1-го порядка
(астатическая система) называется такая
система, установившаяся ошибка которой
равна нулю при постоянном воздействии
(![]() ),
а при отработке линейно изменяющегося
во времени воздействия видаg(t)=a0+a1tошибка постоянна и пропорциональна
скорости изменения (
),
а при отработке линейно изменяющегося
во времени воздействия видаg(t)=a0+a1tошибка постоянна и пропорциональна
скорости изменения (![]() ).
).
Величину
![]() можно оценить, зная передаточную функцию
САУ по ошибке:
можно оценить, зная передаточную функцию
САУ по ошибке:
![]() (41)
(41)
где передаточная функция разомкнутой системы
![]()
Для астатической САУ
![]() (42)
(42)
где
![]() – полиномы, а
– полиномы, а![]() – порядок астатизма.
– порядок астатизма.
Для статической САУ (![]() )
величина статической ошибки
)
величина статической ошибки![]() определяется равенством
определяется равенством
![]() (43)
(43)
где K– коэффициент усиления разомкнутой системы.
Точность САУ по отношению к возмущающему воздействию f(t)можно оценить, используя соответствующую передаточную функцию
![]() (44)
(44)
Порядок астатизма системы по отношению к возмущению определяется числом интегрирующих звеньев, расположенных в структурной схеме до точки приложения возмущения и не охваченных местными обратными связями.