

Задание № 5
Реализуйте комбинированную САУ (рис. 48). Изменяя любые коэффициенты усиления в допустимых пределах, получите графики выходной величины. Проанализируйте полученные результаты. На основании анализа выставите коэффициенты так, чтобы качество регулирования было по возможности наибольшим. Постройте статическую и динамическую характеристику получившейся системы.
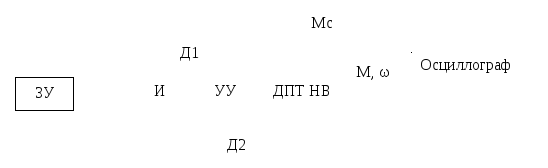 Рис.
48. Функциональная схема комбинированной
САУ
Рис.
48. Функциональная схема комбинированной
САУ
Варианты заданий
Для всех двигателей
![]()
Таблица 11
Параметры электродвигателя
|
№ п/п |
Rя, Ом |
Lя, мГн |
J, кг·м2 |
kΦ |
|
1 |
1.63 |
15 |
0.05 |
1,58 |
|
2 |
0.95 |
9.1 |
0.125 |
1,81 |
|
3 |
0.57 |
10.9 |
0.155 |
1,74 |
|
4 |
0.42 |
7.1 |
0.3 |
2,29 |
Таблица 12
Варианты заданий
|
№ п/п |
№ ДПТ |
Диапазон изменения Мс, Нм |
Заданное
(рекомендуемое) значение скорости
|
|
1 |
1 |
10-100 |
100 |
|
2 |
2 |
25-125 |
90 |
|
3 |
3 |
50-150 |
120 |
|
4 |
4 |
20-80 |
110 |
|
5 |
1 |
50-120 |
100 |
|
6 |
2 |
20-100 |
115 |
|
7 |
3 |
75-150 |
120 |
|
8 |
4 |
40-120 |
90 |
|
9 |
1 |
25-125 |
100 |
|
10 |
2 |
50-150 |
100 |
|
11 |
3 |
20-80 |
120 |
|
12 |
4 |
50-120 |
110 |
|
13 |
1 |
20-100 |
95 |
|
14 |
2 |
75-150 |
100 |
Требования по оформлению отчёта
Отчет о работе должен содержать:
Задание на лабораторную работу в соответствии с вариантом.
Структурные схемы систем для всех вариантов исследуемых систем управления.
Графики переходных процессов для всех вариантов систем управления.
Выводы.
Контрольные вопросы
Какие части графиков соответствуют переходным процессам, а какие установившимся?
Чем объясняется наличие или отсутствие перерегулирования на графиках?
От чего зависит жесткость нагрузочной характеристики?
Как получить идеальную нагрузочную характеристику в САУ по возмущению?
Можно ли получить идеально жесткую нагрузочную характеристику в замкнутой САУ, если нет, то – почему, если да, то – каким образом?
Астатизм какого порядка используется в данной модели?
Почему чисто интегральные звенья используются в САУ очень редко?
В чем состоит сложность реализации комбинированных САУ и САУ по возмущению?
Как можно уменьшить время переходных процессов и величину перерегулирования?
Глава6. Исследование устойчивости сау
6.1. Устойчивость линейных сау
Устойчивость является важнейшим и самым необходимым условием работоспособности систем автоматического управления. Под устойчивостью понимают способность системы вернуться в положение равновесия, будучи отклоненной управляющим либо возмущающим воздействием.
Рассмотрим типовую САУ и ее передаточные функции (рис. 49).

Рис. 49. Типовая САУ
Для типовой структурной схемы замкнутой САУ различают 3 основные ПФ, применяемые для исследований:
![]() –
ПФ разомкнутой системы;
–
ПФ разомкнутой системы;
![]() – ПФ замкнутой системы;
– ПФ замкнутой системы;
![]() – ПФ замкнутой системы по ошибке.
– ПФ замкнутой системы по ошибке.
При исследованиях САУ на устойчивость, как правило, используют характеристическое уравнение замкнутой системы (предполагается, что система замкнута единичной отрицательной обратной связью):
![]() , (33)
, (33)
где W(s)– передаточная функция разомкнутой системы.
При исследованиях устойчивости линейной САУ внешние воздействия на систему можно положить равными нулю. Устойчивость САУ в конечном счете определяется характером ее свободного движения.
Необходимым и достаточным условием устойчивости линейной САУ в общем случае является нахождение всех корней ее характеристического уравнения
![]() (34)
(34)
в левой половине комплексной плоскости.
Для проверки данного факта используются алгебраические и частотные критерии устойчивости.