

10.5. Выполнение расчета
Запуск расчета выполняется с помощью
выбора пункта меню Simulation/Start. или
инструмента
![]() на
панели инструментов. Процесс расчета
можно завершить досрочно, выбрав пункт
менюSimulation/Stop или
инструмент
на
панели инструментов. Процесс расчета
можно завершить досрочно, выбрав пункт
менюSimulation/Stop или
инструмент ![]() .
Расчет также можно остановить
(Simulation/Pause) и затем продолжить
(Simulation/Continue).
.
Расчет также можно остановить
(Simulation/Pause) и затем продолжить
(Simulation/Continue).
10.6. Отображение сигналов в окне осциллографа
При отображении сигналов, поступающих с элемента Bus creatorв осцилографScopeиспользуется следующая последовательность цветов: желтый, фиолетовый, голубой, красный, зеленый, синий.
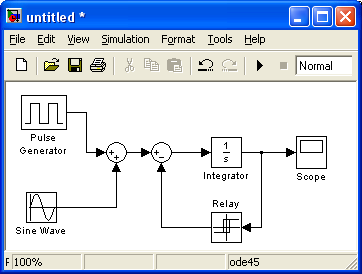
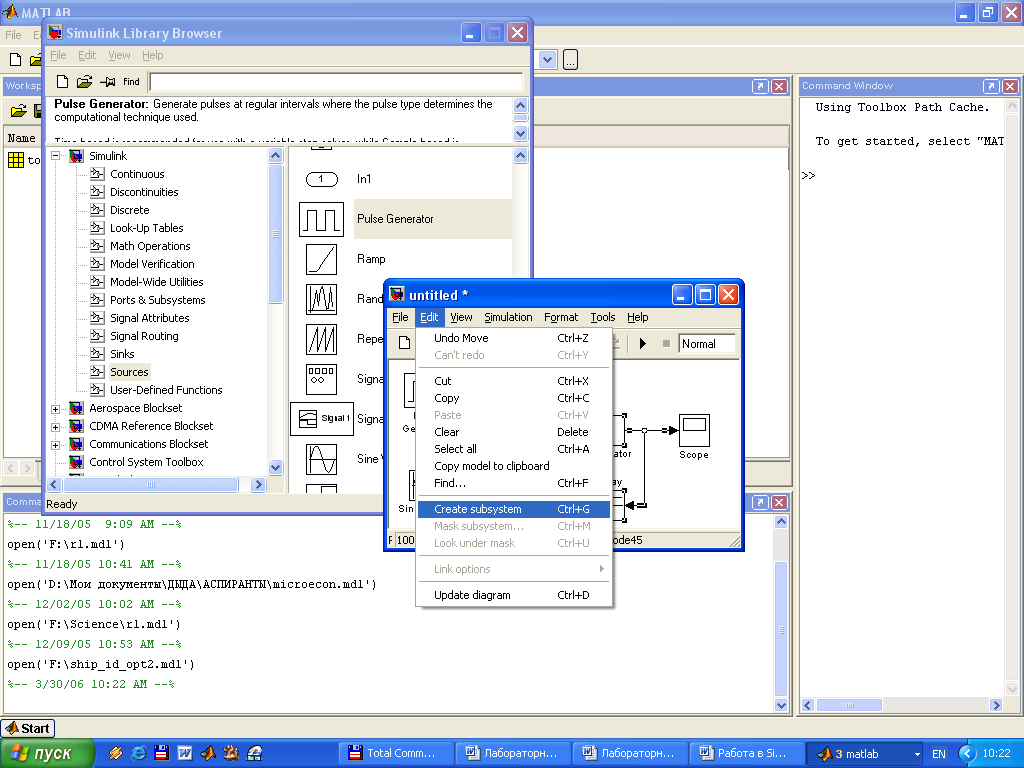
Рис. 78. Создание подсистемы
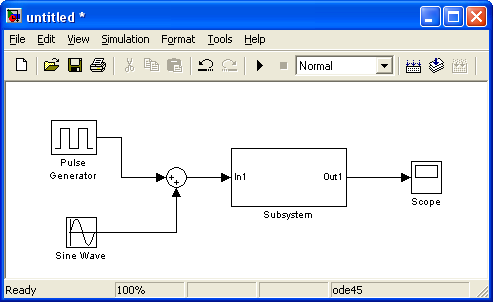
Рис. 79. Модель, использующая подсистему
10.7. Описание свойств основных блоков Simulink
Таблица 26
Sources – источники сигналов и воздействий
|
Изображение |
Название |
Описание | |
|
|
Constant |
Источник постоянного сигнала |
Задает постоянный по уровню сигнал |
|
|
Sine Wave |
Источник синусоидального сигнала |
Формирует синусоидальный сигнал с заданной частотой, амплитудой, фазой и смещением |
|
|
Ramp |
Источник линейно изменяющегося воздействия |
Формирует линейно нарастающий сигнал вида y = Slope* time + Initial value |
|
|
Step |
Генератор ступенчатого сигнала |
Формирует ступенчатый сигнал |
|
|
Signal Generator |
Генератор сигналов |
Формирует один из четырех видов периодических сигналов |
|
|
Pulse Generator |
Источник импульсного сигнала |
Формирование прямоугольных импульсов |
|
|
Repeating Sequence |
Блок периодического сигнала |
Формирование периодического сигнала |


Таблица 27
Sinks– приемники сигналов
|
Изображение |
Название |
Описание | |
|
|
Scope |
Осциллограф |
Строит графики исследуемых сигналов в функции времени, позволяет наблюдать за изменениями сигналов в процессе моделирования |
|
|
ХУ Graph |
Графопостроитель |
Строит график одного сигнала в функции другого |
|
|
Display |
Цифровой дисплей |
Отображает значение сигнала в виде числа |


Таблица 28
Continuous– аналоговые блоки
|
Изображение |
Название |
Описание | |
|
|
Derivative |
Блок вычисления производной |
Выполняет численное дифференцирование входного сигнала |
|
|
lntegrator |
Интегрирующий блок |
Выполняет интегрирование входного сигнала |
|
|
Transfer Fcn |
Блок передаточной функции |
Блок передаточной характеристики Transfer Fcn задает передаточную функцию в виде отношения полиномов |
|
|
Zero-Pole |
Блок передаточной функции |
Блок Zero-Pole определяет передаточную функцию с заданными полюсами и нулями |
|
|
State-Space |
Блок модели динамического объекта |
Блок создает динамический объект, описываемый уравнениями в пространстве состояний |




Таблица 29
Discontinuous – нелинейные блоки
|
Изображение |
Название |
Описание | |
|
|
Backlash |
Блок люфта |
Моделирует нелинейность типа “люфт” |
|
|
Coulomb and Viscous Friction |
Блок сухого и вязкого трения |
Моделирует эффекты сухого и вязкого трения |
|
|
Dead Zone |
Блок с зоной нечувствительности |
Реализует нелинейную зависимость типа "зона нечувствительности (мертвая зона)" |
|
|
Relay |
Релейный блок |
Реализует релейную нелинейность |
|
|
Saturation |
Блок ограничения |
Выполняет ограничение величины сигнала |


Таблица 30
Math– блоки математических операций
|
Изображение |
Название |
Описание | |
|
|
Abs |
Блок вычисления модуля |
Выполняет вычисление абсолютного значения величины сигнала |
|
|
Sum |
Блок вычисления суммы |
Выполняет вычисление суммы текущих значений сигналов |
|
|
Product |
Блок умножения |
Выполняет вычисление произведения текущих значений сигналов |
|
|
Sign |
Блок определения знака сигнала |
Определяет знак входного сигнала |
|
|
Gain |
Усилители |
Выполняет умножение входного сигнала на постоянный коэффициент |
|
|
Slider Gain |
Ползунковый регулятор |
Обеспечивает изменение коэффициента усиления в процессе расчета |
|
|
Math Function |
Блок вычисления математических функций |
Выполняет вычисление математической функции |


Окончание табл. 30
|
Изображение |
Название |
Описание | |
|
|
Trigonometric Function |
Блок вычисления тригонометрических функций |
Выполняет вычисление тригонометрической функции |
|
|
MinMax |
Блок определения минимального или максимального значения |
Определяет максимальное или минимальное значение из всех сигналов, поступающих на его входы |
|
|
Relational Operator |
Блок вычисления операции отношения |
Блок сравнивает текущие значения входных сигналов |
|
|
Logical Operation |
Блок логических операций |
Реализует одну из базовых логических операций |

Таблица 31
Look-Up Tables – Блоки таблиц
|
Изображение |
Название |
Описание | |
|
|
Look-Up Table |
Блок одномерной таблицы |
Задает в табличной форме функцию одной переменной |
|
|
Look-Up Table(2D) |
Блок двумерной таблицы |
Задает в табличной форме функцию двух переменных |
Таблица 32
Ports&Subsystems – подсистемы
|
Изображение |
Название |
Описание | |
|
|
In1 |
Вход1 |
Входной порт в подсистему модели |
|
|
Out1 |
Выход1 |
Выходной порт их подсистемы модели |
|
|
Subsystem |
Подсистема |
Подсистема – это фрагмент Simulink-модели, оформленный в виде отдельного блока |

Таблица 33
Signal&Routings– блоки преобразования
сигналов и вспомогательные блоки
|
Изображение |
Название |
Описание | |
|
|
Bus creator |
Блок шинного формирователя |
Формирует шину из сигналов различных типов |
|
|
Manual switch |
Блок ручного переключателя |
Выполняет переключение входных сигналов по команде пользователя |
