

Содержание отчета о работе
Титульный лист.
Задание к лабораторной работе.
Передаточные функции, содержащие параметры согласно варианту.
Вывод выражений для частотных характеристик. Теоретический расчет частотных характеристик для указанных в задании параметров и построение АЧХ, ФЧХ и ЛАЧХ.
Программный код для построения частотных характеристик для типовых динамических звеньев согласно варианту задания.
Результаты построения частотных характеристик в среде MatLab (SciLab).
Выводы о влиянии на частотные характеристики параметров передаточных функций.
Контрольные вопросы
Что называется частотными характеристиками?
Как получить частотные характеристики опытным путем?
Как получить частотные характеристики теоретическим путем по известной передаточной функции звена?
Что такое АФЧХ? Как получить выражение АФЧХ?
Что такое ВЧХ? Как получить выражение ВЧХ?
Что такое МЧХ? Как получить выражение МЧХ?
Что такое АЧХ? Как получить выражение АЧХ?
Что такое ФЧХ? Как получить выражение ФЧХ?
Что такое ЛАЧХ? Как получить выражение ЛАЧХ?
Что такое ЛФЧХ? Как получить выражение ЛФЧХ?
Как построить годограф АФЧХ?
Постройте АФЧХ, ЛАЧХ и ЛФЧХ безынерционного звена.
Постройте АФЧХ, ЛАЧХ и ЛФЧХ интегрирующего звена.
Постройте АФЧХ, ЛАЧХ и ЛФЧХ апериодического звена.
Постройте АФЧХ, ЛАЧХ и ЛФЧХ колебательного звена.
Постройте АФЧХ, ЛАЧХ и ЛФЧХ консервативного звена.
Постройте ЛАЧХ и ЛФЧХ идеального дифференцирующего звена.
Постройте ЛАЧХ и ЛФЧХ идеального форсирующего звена.
Как изменятся ЛАЧХ и ЛФЧХ звена, если коэффициент усиления возрастет в 100 раз?
Глава4. Структурные преобразования сау
4.1. Виды соединений сау
Последовательное соединение звеньев
В системе, состоящей из n последовательно соединенных звеньев (рис. 24) выходной сигнал предыдущего звена равен входному сигналу последующего.
 Рис.
24.
Последовательное соединение звеньев
Рис.
24.
Последовательное соединение звеньев
Очевидно, что Xвых=XвхW1(s)W2(s)…Wn(s).Следовательно, эквивалентная передаточная функция системы примет вид
![]() . (29)
. (29)
Таким образом, передаточная функция последовательно соединенных звеньев равна произведению передаточных функций этих звеньев.
Параллельное соединение звеньев
В отличие от параллельного соединения в электротехнике, где элементы подключаются к одному источнику напряжения, в теории управления параллельное соединение предполагает сумму выходных сигналов (рис. 25). Очевидно, что выходной сигнал будет определяться как Xвых=XвхW1(s)+ XвхW2(s)+… XвхWn(s)= Xвх(W1(s)+ W2(s)+… Wn(s)).
Следовательно, передаточная функция параллельно соединенных звеньев будет определяться следующим образом:
![]() .
(30)
.
(30)
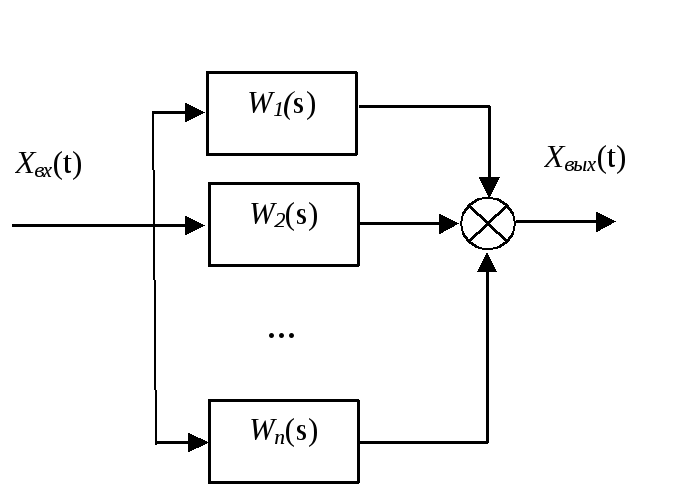
Рис. 25. Параллельное соединение звеньев
Таким образом, эквивалентная передаточная функция при параллельном соединении звеньев равна сумме передаточных функций отдельных звеньев.
Встречно-параллельное соединение (с обратной связью)
Соединение с обратной связью является
классическим случаем в теории управления
и базовой конфигурацией для создания
любой автоматической системы. Рассмотрим
структуру системы с обратной связью
(рис. 26). На вход звена, охваченного
обратной связью, подается сигнал
рассогласования, равный
![]() .На рис. 26 обозначены
.На рис. 26 обозначены![]() - передаточная функция прямого канала
САУ,
- передаточная функция прямого канала
САУ,![]() - передаточная функция канала обратной
связи. Выведем значениеXвых:
- передаточная функция канала обратной
связи. Выведем значениеXвых:
![]()
![]()
![]()
![]()

Рис. 26. Соединение звеньев с обратной связью
Таким образом, передаточная функция замкнутой системы с обратной связью описывается следующим выражением:
![]() .
(31)
.
(31)
Передаточная функция (31) описывает случай отрицательной обратной связи. Если обратная связь положительная, то очевидно, что
![]() .
(32)
.
(32)
К многоконтурным относятся САУ, в которых помимо замкнутого контура с главной обратной связью имеются контуры, образованные локальными прямыми и обратными связями. Часть из них имеет естественную природу, а остальные введены для придания системе нужных динамических характеристик. При этом некоторые из этих связей могут быть перекрестными. В этом случае для определения эквивалентной передаточной функции системы используют ряд дополнительных правил наряду с рассмотренными ранее. К их числу относятся следующие: правила переноса сумматора через звено и точку разветвления (точку съема сигнала), правила переноса точки разветвления через звено и т. п. Все эти правила достаточно очевидны и вытекают из условия сохранения неизменным сигнала на выходе структуры после выполнения соответствующих преобразований.
Например, при переносе сумматора через
звено по направлению движения сигнала
все входящие в сумматор сигналы должны
быть преобразованы путем включения в
свои каналы передаточной функции
звеньев, через которые был перенесен
сумматор (рис. 27). При переносе сумматора
через звено против направления сигнала
(рис. 28) в исходную структуру добавляется
звено с передаточной функцией, обратной
той, через которую был произведен перенос
(![]() ).
В этом случае сигнал на выходе структуры
сохраняется неизменным.
).
В этом случае сигнал на выходе структуры
сохраняется неизменным.
На примере структуры, приведенной на рис. 29, проиллюстрировано правило переноса точки съема сигнала через звено по направлению сигнала и в противоположном направлении.

Рис. 27. Перенос сумматора по направлению движения сигнала
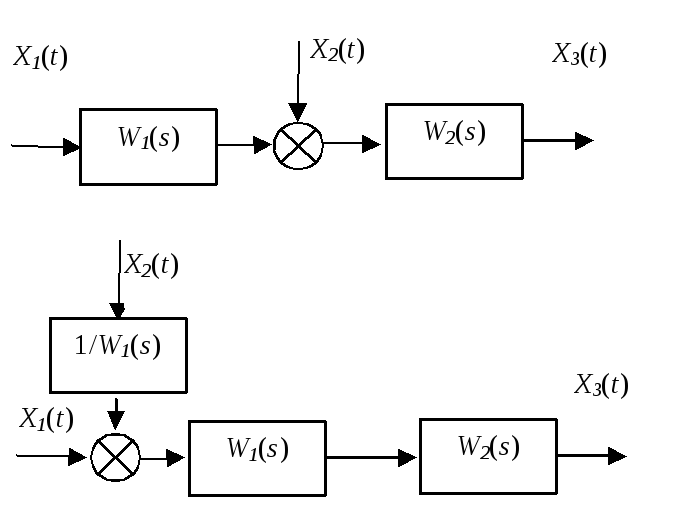
Рис. 28. Перенос сумматора против направления движения сигнала
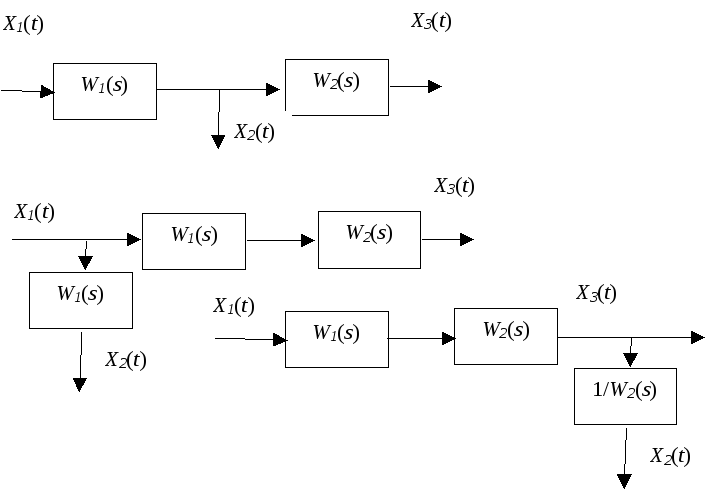 Рис.
29. Перенос точки ветвления (соединения)
Рис.
29. Перенос точки ветвления (соединения)