

5.4. Астатическое управление
Мы рассмотрели систему, в которой выходная величина при изменении возмущающего воздействия изменяется. Возможны ли автоматические системы регулирования, в которых бы в установившемся режиме работы выходная величина не зависела от возмущающего воздействия? Оказывается, такие системы есть.
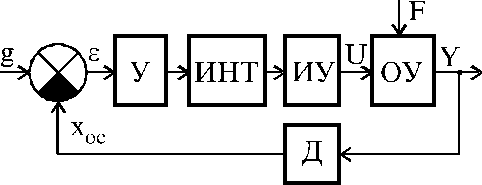
Рис. 40. Функциональная схема системы
В этих системах отсутствует пропорциональная
связь в установившемся режиме работы
между управляющим воздействием и
величиной отклонения. Включим в систему
устройство, у которого выходная величина
связана с входной следующей зависимостью:
![]() .
.
Увеличение
![]() вызывает уменьшение выходной величины
вызывает уменьшение выходной величины![]() и увеличение отклонения
и увеличение отклонения![]() ,
что приводит к увеличению управляющего
воздействия
,
что приводит к увеличению управляющего
воздействия![]() и, следовательно, к увеличению выходной
величины.
и, следовательно, к увеличению выходной
величины.
Здесь ИНТ – интегрирующее устройство.
Представим, как могут изменяться
координаты системы:
![]() – отклонение,
– отклонение,![]() – управляющее воздействие,
– управляющее воздействие,![]() – выходная величина при включении
системы в работу и при изменении
возмущающего воздействия.
– выходная величина при включении
системы в работу и при изменении
возмущающего воздействия.
В рассматриваемой системе установившийся режим работы возможен лишь в том случае, когда величина отклонения равна нулю. Только в этом случае выходная координата интегрирующего устройства не будет изменяться. Нагрузочная характеристика системы будет иметь вид прямой, параллельной оси возмущающего воздействия.
Системы, в которых установившееся значение выходной величины не зависит от возмущающего воздействия, называются астатическими. Регулирование называется астатическим. Регулятор и объект называются астатическими, если они обладают способностью интегрировать входной сигнал.

Рис. 41. Изменение координат системы
5.5. Комбинированные системы автоматического
Управления
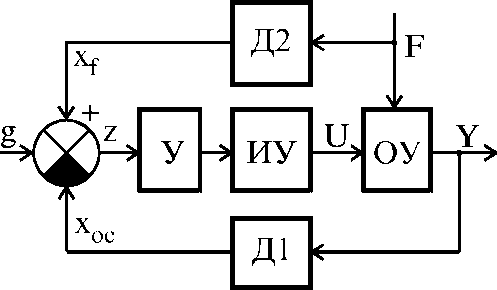
Рис. 42. Функциональная схема комбинированной САУ
Комбинированные системы автоматического
регулирования представляют совокупность
двух систем: САУ по отклонению и САУ по
возмущению. В такой системе сигнал на
входе усилителя равен
![]() .
.
5.6. Описание математической модели управляемого объекта
Рассмотрим структурную схему объекта управления – двигателя постоянного тока независимого управления. Структурная схема ДПТ НВ приведена на рис. 43.
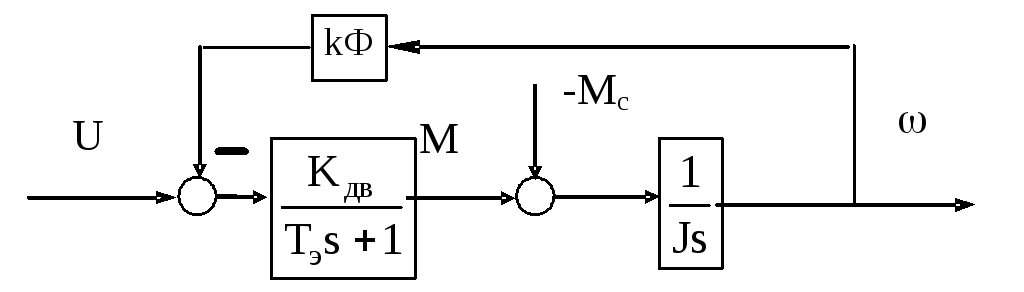
Рис. 43. Структурная схема ДПТ НВ
На структурной схеме приняты следующие
обозначения: U – напряжение на якорной
обмотке двигателя, M – электромагнитный
момент двигателя, MС– момент
сопротивления движению,![]() – скорость вращения вала двигателя,
– скорость вращения вала двигателя,![]() – электромагнитная постоянная двигателя,
– электромагнитная постоянная двигателя,![]() – коэффициент передачи двигателя, Rя– активное сопротивление якорной цепи,
Lя– индуктивность якорной цепи,
J – суммарный момент инерции якоря и
нагрузки,
– коэффициент передачи двигателя, Rя– активное сопротивление якорной цепи,
Lя– индуктивность якорной цепи,
J – суммарный момент инерции якоря и
нагрузки,![]() – коэффициент потока, создаваемый
обмоткой возбуждения.
– коэффициент потока, создаваемый
обмоткой возбуждения.
Если управляющим воздействием является
напряжение питания якоря
![]() ,
то по величине тока якоря можно судить
о нагрузке на валу. Момент вала двигателя
,
то по величине тока якоря можно судить
о нагрузке на валу. Момент вала двигателя![]() можно считать контролируемой величиной.
можно считать контролируемой величиной.
При управлении со стороны якоря
характеристика управления
![]() носит монотонный характер и с ростом
напряжения питания якоря скорость
вращения вала растет.
носит монотонный характер и с ростом
напряжения питания якоря скорость
вращения вала растет.
Практическая работа
Задание № 1
Реализуйте разомкнутую САУ (рис. 44).
Изменяя коэффициент усиления усилителя
в устройстве усиления (УУ,
![]() )
в допустимых пределах, получите графики
выходной величины. Проанализируйте
полученные результаты. На основании
анализа выставите коэффициент так,
чтобы качество регулирования было по
возможности наибольшим. Постройте
статическую и динамическую характеристику
получившейся системы.
)
в допустимых пределах, получите графики
выходной величины. Проанализируйте
полученные результаты. На основании
анализа выставите коэффициент так,
чтобы качество регулирования было по
возможности наибольшим. Постройте
статическую и динамическую характеристику
получившейся системы.
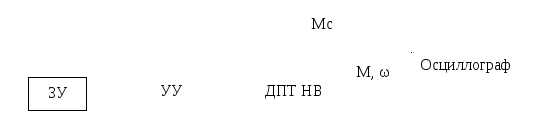 Рис.
44. Функциональная схема разомкнутой
САУ
Рис.
44. Функциональная схема разомкнутой
САУ
Задание № 2
Реализуйте САУ по возмущению (рис. 45).
Изменяя коэффициент усиления датчика
(Д,
![]() )
и усилителя в устройстве усиления (УУ,
)
и усилителя в устройстве усиления (УУ,![]() )
в допустимых пределах, получите графики
выходной величины. Проанализируйте
полученные результаты. На основании
анализа выставите коэффициенты так,
чтобы качество регулирования было по
возможности наибольшим. Постройте
статическую и динамическую характеристику
получившейся системы.
)
в допустимых пределах, получите графики
выходной величины. Проанализируйте
полученные результаты. На основании
анализа выставите коэффициенты так,
чтобы качество регулирования было по
возможности наибольшим. Постройте
статическую и динамическую характеристику
получившейся системы.
 Рис.
45. Функциональная схема САУ по возмущению
Рис.
45. Функциональная схема САУ по возмущению
Задание № 3
Реализуйте замкнутую САУ (рис. 46). Изменяя
коэффициент усиления датчика (Д,
![]() )
и усилителя в устройстве усиления (УУ,
)
и усилителя в устройстве усиления (УУ,![]() )
в допустимых пределах, получите графики
выходной величины. Проанализируйте
полученные результаты. На основании
анализа выставите коэффициенты так,
чтобы качество регулирования было по
возможности наибольшим. Постройте
статическую и динамическую характеристику
получившейся системы.
)
в допустимых пределах, получите графики
выходной величины. Проанализируйте
полученные результаты. На основании
анализа выставите коэффициенты так,
чтобы качество регулирования было по
возможности наибольшим. Постройте
статическую и динамическую характеристику
получившейся системы.
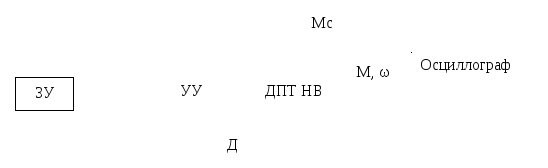
Рис. 46. Функциональная схема замкнутой САУ
Задание № 4
Реализуйте САУ с астатическим
регулированием (рис. 47). Изменяя коэффициент
усиления датчика (Д,
![]() ),
усилителя в устройстве усиления (УУ,
),
усилителя в устройстве усиления (УУ,![]() )
и интегратора (И,
)
и интегратора (И,![]() )
в допустимых пределах, получите графики
выходной величины. Проанализируйте
полученные результаты. На основании
анализа выставите коэффициенты так,
чтобы качество регулирования было по
возможности наибольшим. Постройте
статическую и динамическую характеристику
получившейся системы.
)
в допустимых пределах, получите графики
выходной величины. Проанализируйте
полученные результаты. На основании
анализа выставите коэффициенты так,
чтобы качество регулирования было по
возможности наибольшим. Постройте
статическую и динамическую характеристику
получившейся системы.
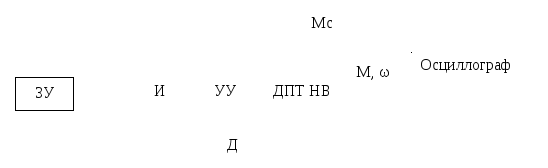
Рис. 47. Функциональная схема САУ с астатическим регулированием