

- •Мобильные системы радиосвязи
- •Оглавление
- •Введение
- •1. Беспроводные сети связи
- •1.1. Мобильные системы связи
- •1.1.1. Мобильные системы связи первого поколения
- •1.1.2. Мобильные системы связи второго поколения
- •1.1.3. Мобильные системы связи третьего поколения
- •1.2. Общее представление сети связи
- •1.2.1. Модель OSI-7 для открытых сетей связи
- •1.2.2. Уровни модели OSI-7
- •1.2.3. Реализация модели OSI-7 для радиосетей
- •1.3. Функциональная схема сети радиосвязи
- •Заключение
- •2. Цифровые модулирующие сигналы
- •2.1. Представление цифрового сигнала во временной и частотной областях
- •2.2. Виды и параметры цифровых сигналов
- •2.2.1. Виды цифровых сигналов
- •2.2.2. Параметры цифровых сигналов
- •2.2.3. Спектральная плотность мощности цифровых сигналов
- •2.3. Прохождение цифрового сигнала по линейным цепям и межсимвольная интерференция
- •2.3.1. Искажения сигнала в линейных цепях
- •2.3.2. Межсимвольная интерференция
- •2.3.3. Критерий Найквиста
- •2.3.4.Ограничение полосы частот цифрового сигнала
- •Заключение
- •3.Узкополосные модулированные сигналы
- •3.1. Общие свойства модулированных сигналов
- •3.1.1.Определение модулированного сигнала во временной и частотной областях
- •3.1.2. Функциональные схемы модуляторов и демодуляторов
- •3.1.3. Ограничение спектра модулированного колебания
- •3.1.4. Энергия и расстояние между символами модулированного сигнала
- •3.2. Импульсная амплитудная модуляция РАМ
- •3.3. Фазовая модуляция PM
- •3.3.1. Общее представление фазомодулированного сигнала
- •3.3.2. Бинарная фазовая модуляция BPSK
- •3.3.3. Квадратурная фазовая модуляция QPSK
- •3.3.4. Дифференциальная бинарная фазовая модуляция DBPSK
- •3.3.7. Амплитудно-фазовая модуляция QAM
- •3.4. Частотная модуляция FM
- •3.4.2. Частотная модуляция минимального фазового сдвига MSK
- •Заключение
- •4. Модулированные сигналы с расширенным спектром
- •4.1. Сигналы с непосредственным расширением спектра DSSS
- •4.1.1. Основные свойства DSSS сигналов
- •4.1.2. Система связи с DSSS сигналами
- •4.2. Широкополосные сигналы со скачками частоты FHSS
- •4.3. Сверхширокополосные сигналы UWB
- •4.4. Многомерные сигналы
- •4.4.1. Общее описание многомерных сигналов
- •4.4.2. Многомерная ортогональная частотная модуляция OFDM
- •Заключение
- •5. Синтез и преобразование частот
- •5.1. Функциональная схема ФАПЧ и синтезатора частоты
- •5.2. Основное уравнение синтезатора частоты
- •5.3. Параметры синтезатора частоты
- •5.3.1. Полоса удержания (захвата)
- •5.3.2. Ошибка частоты и фазы в установившемся режиме
- •5.3.3. Переходные характеристики и время установления частоты
- •5.3.5. Устойчивость
- •5.4. Частотная модуляция в синтезаторе частоты
- •5.5. Преобразование частоты в петле ФАПЧ
- •Заключение
- •6. Распространение радиоволн в условиях города
- •6.1. Методы анализа распространения радиоволн
- •6.2. Расчет дальности радиосвязи в модели "большого расстояния"
- •6.2.1. Расчет дальности связи по методике МККР
- •6.2.3. Расчет теневых зон радиосвязи
- •6.2.4. Распространение радиоволн внутри здания
- •6.3. Анализ распределения поля в модели "малого расстояния"
- •6.3.1. Энергия принимаемого сигнала в многолучевом радиоканале
- •6.3.2. Параметры многолучевого канала
- •6.3.3. Типы фединга в многолучевом канале
- •Заключение
- •7. Детектирование и прием цифровых сигналов
- •7.1. Критерий максимального правдоподобия
- •7.2. Корреляционный и согласованный прием
- •7.3. Согласованный фильтр
- •7.4. Достоверность приема бинарной цифровой информации в условиях белого гауссовского шума
- •7.7. Когерентное детектирование
- •7.7.1. Когерентное детектирование BPSK сигнала
- •7.7.2. Схема Костаса оптимального детектирования сигналов с угловой модуляцией
- •7.8. Тактовая синхронизация
- •Заключение
- •Прием сигналов в условиях фединга
- •8.1. Разнесенный прием в широкополосных каналах
- •8.1.1. Статистика принимаемых сигналов
- •8.1.2. Достоверность приема информации
- •8.1.3. Методы реализации разнесенного приема
- •8.2.1. Общие принципы работы эквалайзера
- •8.2.2. Линейный и нелинейный эквалайзеры
- •8.3. Интерливинг
- •Заключение
- •9. Стандарты на радиоканал мобильной связи
- •9.1. Требования к параметрам передатчика
- •9.2. Требования к параметрам приемника
- •Заключение
- •Литература
B =1 (2T ) , так, чтобы оба фильтра обеспечивали примерно
(2T ) , так, чтобы оба фильтра обеспечивали примерно
одинаковое выходное соотношение сигнал/шум.
Из рис.7.6 следует, что для входного одиночного прямоугольного импульса длительностью T выходной импульс при согласованной фильтрации существует только на временном интервале 2T и достигает максимума спустя время T после прихода. При использовании ФНЧ выходной импульс существует на всем временном интервале, достигает максимума в тот же момент времени T, а величина максимума несколько меньше, чем при согласованной фильтрации.
7.4. Достоверность приема бинарной цифровой информации в условиях белого гауссовского шума
Определим численные характеристики достоверности приема бинарной информации в оптимальном приемнике (рис.7.7). Примем, что демодуляция осуществляется когерентным детектором, без искажений переносящим спектр модулированного колебания в baseband диапазон. Выделение полезного демодулированного сигнала из общего выходного сигнала детектора осуществляется оптимальным фильтром или ФНЧ. Частотная
|
|
|
|
r |
|
|
|
|
|
Решающее |
|
|
|
|
|
|
|
Демодулятор |
|
Фильтр |
|
|
устройство |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t = nTs
Рис.7.7. Оптимальный приемник бинарного сигнала
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
характеристика оптимального фильтра согласована с |
||||||||||||||
ожидаемой формой принимаемых импульсов, полоса |
||||||||||||||
пропускания ФНЧ достаточно широкая, так что форма |
||||||||||||||
импульса на выходе фильтра близка к входной. |
|
|
||||||||||||
По завершении приема очередного бинарного символа в |
||||||||||||||
моменты времени |
t = nTs , кратные |
длительности |
одного |
|||||||||||
символа демодулированного сигнала, на входе решающего |
||||||||||||||
устройства ожидаются сигналы величиной s1 или s2 . |
||||||||||||||
Сигналы |
s1 |
|
и |
s2 |
|
соответствуют |
бинарным |
|||||||
информационным символам 0 и 1, а их конкретные |
||||||||||||||
величины |
определяются |
|
технической |
|
реализацией |
|||||||||
корреляторов (фильтров). Решающее устройство сравнивает |
||||||||||||||
величину принятого сигнала r с ожидаемыми величинами s1 |
||||||||||||||
и s2 для определения принятого информационного символа |
||||||||||||||
(0 или 1). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Алгоритм принятия решения основан на анализе |
||||||||||||||
распределения |
вероятности |
правильного |
|
обнаружения |
||||||||||
сигнала в условиях белого гауссовского шума: |
|
|
||||||||||||
|
|
P(r, s ) = |
1 |
×exp{ |
(r - s )2 |
}; |
|
|
|
|||||
|
|
|
|
1 |
|
|
|
|||||||
|
|
|
1 |
2ps0 |
|
|
|
2s02 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
(7.24) |
|||
|
|
|
|
|
1 |
|
×exp{(r - s2 )2 }, |
|
|
|||||
|
|
P(r, s2 ) = |
|
|
|
|
||||||||
|
|
|
|
|
2ps0 |
|
|
|
2s02 |
|
|
|
|
|
где s2 |
= n2 (t) |
- средняя мощность шума на входе решающего |
||||||||||||
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
устройства. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Графическое |
|
изображение |
|
|
вероятности |
|
правильного |
|||||||
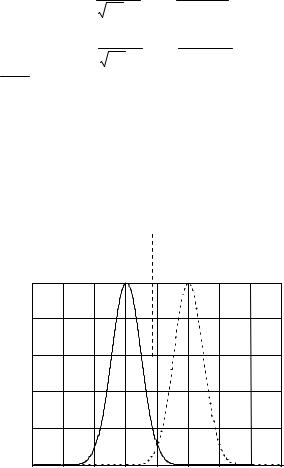
определения принятых сигналов показано на рис.7.8. |
||||||||||||||
Предполагается, что ожидаемые значения амплитуд |
||||||||||||||
импульсов на выходе фильтра в моменты времени |
t = nTb |
|||||||||||||
равны |
s1 = 0 |
и |
s2 =1 . |
По горизонтальной |
оси отложено |
|||||||||
|
P(r|s) |
|
|
|
|
|
|
VT |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
–4 |
–3 |
–2 |
–1 |
|
0 |
|
1 |
2 |
|
3 |
4 |
||
|
|
|
|
|
s1 |
|
|
|
s2 |
|
|
|
|
|
Рис.7.8. Вероятность правильного приема бинарного сигнала |
||||||||||||||
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com

возможное значение амплитуды принятого сигнала r(nTb ) ,
по вертикальной оси - вероятность появления этого значения.
Решающее устройство в моменты времени t = nTb , заданные импульсами синхронизации, сравнивает сигнал на выходе фильтра с установленным пороговым значением VT . Если амплитуда сигнала на выходе фильтра меньше VT , принимается решение о приеме сигнала s1 , в противном случае принимается решение о наличии сигнала s2 . Очевидно, что ошибка в приеме сигнала s1 равна "хвосту" функции гауссовского распределения плотности вероятности правильного приема сигнала s1 , который находится в области сигналов r < VT . Точно так же ошибка приема сигнала s2 равна "хвосту" функции гауссовского распределения плотности вероятности правильного приема сигнала s2 , который находится в области r > VT . Полная ошибка приема сигнала равна
BER = |
1 VT |
P(s ) dr |
+ |
1 |
∞ P(s ) dr . |
(7.25) |
||||
|
2 |
ò |
1 |
0 |
|
2 |
ò |
2 |
0 |
|
|
|
−∞ |
|
|
|
|
VT |
|
|
|
После несложных преобразований выражение для функции BER приводится к стандартному виду:
BER = |
1 Q{−VT + s1}+ |
1 Q{VT − s2 }, |
(7.26) |
|||||
где |
2 |
σ0 |
|
|
2 |
σ0 |
|
|
|
|
|
|
∞ |
|
|
|
|
|
|
1 |
|
|
|
|
||
|
Q(z) = |
|
òe−λ2 / 2 dλ. |
|
||||
|
|
|
|
|
||||
|
|
2π |
|
|||||
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com

Для минимизации величины BER порог выбирается посередине между ожидаемыми значениями принимаемого сигнала:
V = |
s1 + s2 |
. |
(7.27) |
T |
2 |
|
При таком выборе порога выражение для BER принимает вид
BER = Q{ |
s |
− s |
2 |
}=Q{ |
[s |
− s |
|
]2 |
|
1 |
|
1 |
|
2 |
}. |
(7.28) |
|||
2σ0 |
|
|
|||||||
|
|
|
|
4σ02 |
|
|
|||
Таким образом, вероятность ошибочного приема бинарного сигнала в белом гауссовском шуме зависит от отношения разности значений сигналов в baseband диапазоне и уровня шума в радиоканале. Это отношение фактически является отношением сигнал/шум для разностного сигнала. Следует подчеркнуть, что разность значений между сигналами s1 и
s2 , как и средняя мощность шума σ02 , определяются на
входе решающего устройства.
Уточним общее выражение функции BER (7.28) для согласованного фильтра, который, как известно, максимизирует соотношение сигнал/шум на своем выходе. Очевидно, для приема бинарного сигнала, содержащего импульсы двух видов и , согласованный фильтр в
схеме на рис.7.7 должен иметь импульсную характеристику (7.18), согласованную с их разностью sd (t) = s1(t) − s2(t) :
h(t) = s1(Tb − t) − s2 (Tb − t).
В соответствии с формулой (7.17) согласованный фильтр имеет на выходе максимально высокое отношение сигнал/шум, равное отношению энергии (в данном случае разностного сигнала Ed ) к спектральной плотности
мощности шума:
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com

( |
|
S |
)out = [sd (t0 )]2 = |
|
2Ed |
. |
|
|
(7.29) |
||||
|
|
|
|
|
|||||||||
|
|
N |
|
|
σ02 |
|
|
N0 |
|
||||
Подставляя (7.29) в (7.28), получим: |
|
|
|
|
|
|
|
||||||
BER =Q{ |
Ed |
|
} = Q{ |
|
|
Eb (1 − ρ) |
|
}, |
(7.30) |
||||
2N0 |
|
||||||||||||
|
|
|
|
|
|
|
2N0 |
|
|||||
где Eb - собственная |
энергия |
принимаемого сигнала; ρ - |
|||||||||||
коэффициент кросс-корреляции.
Таким образом, применение согласованного фильтра обеспечивает минимально возможное значение функции ошибок BER, зависящее исключительно от энергии разностного сигнала на входе фильтра и спектральной плотности мощности белого гауссовского шума Реализация согласованного фильтра является не очень
простой задачей. Этот фильтр не всегда является каузальным, т.е. реализуемым с помощью RLC элементов. Но даже при цифровой фильтрации его реализация не очевидна, так как формы передаваемых импульсов в многопозиционных методах модуляции с формирующими фильтрами достаточно сложны. Поэтому вместо согласованного фильтра очень часто используется фильтр низких частот. Преимущества использования ФНЧ очевидны. Во-первых, этот фильтр всегда можно реализовать как фильтр Найквиста, т.е. не вносить последетекторной фильтрацией дополнительных межсимвольных искажений. Во-вторых, при определенных условиях на выходе этого фильтра можно получить "почти" то же соотношение сигнал/шум, что и на выходе согласованного фильтра. Это возможно при приеме одиночного прямоугольного импульса (см. рис.7.6), а также в ряде других ситуаций, которые будут рассмотрены ниже.
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com

Для сравнения функции BER согласованного фильтра и ФНЧ уточним общее выражение функции BER (7.28) при условии, что фильтр низкой частоты имеет достаточно широкую полосу пропускания, так что форма сигнала на выходе фильтра почти совпадает с формой входного сигнала. Мощность шума на выходе ФНЧ равна
σ02 = |
N0 |
2B. |
(7.31) |
|
|||
2 |
|
|
|
Подставляя (7.31) в (7.28), получим выражение BER при использовании фильтра низкой частоты:
BER =Q{ |
|
(s |
− s |
2 |
)2 |
|
|
|
|
1 |
|
|
}. |
(7.32) |
|||||
4N0B |
|||||||||
|
|
|
|
|
|||||
Пример. Для униполярного сигнала возможен прием двух видов импульсов на битовом интервале 0 < t < Tb :
s1(t) = A ; |
s2 (t) = 0. |
(7.33) |
При использовании согласованного фильтра |
энергия |
|
разностного сигнала составляет Ed = A2Tb , а функция BER определяется уравнением (7.30):
|
|
|
|
BER = Q{ |
A2Tb |
}. |
(7.34) |
|
|||
|
2N0 |
|
|
При использовании ФНЧ функция BER определяется уравнением (7.32) при непосредственной подстановке значений s1 и s2 из (7.31):
BER = Q{ |
A2 |
(7.35) |
4N0B }. |
Средняя энергия на бит для униполярного сигнала равна Eb = A2Tb / 2 . С учетом этого выражения функции BER для
согласованного и узкополосного фильтров могут быть записаны в классическом виде:
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
BER |
|
= Q{ Eb } ; |
|
BER |
LPF |
= Q{ |
|
Eb |
|
}. |
(7.36) |
|||
|
match |
|
N0 |
|
|
|
|
N0 (2BTb ) |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
Для полярного сигнала возможен прием двух видов |
||||||||||||||
импульсов на битовом интервале 0 < t < Tb : |
|
|
|
|
||||||||||
|
|
|
|
s1(t) = A; |
|
|
s2 (t) = −A. |
|
|
|
(7.37) |
|||
Проводя вычисления аналогично предыдущему примеру и |
||||||||||||||
учитывая, что средняя энергия на бит для полярного |
||||||||||||||
сигнала равна |
E |
= A2T , |
получим следующие выражения |
|||||||||||
|
|
|
b |
b |
|
|
|
|
|
|
|
|
|
|
для функций BER при согласованной и узкополосной |
||||||||||||||
фильтрации: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BER |
= Q{ |
2Eb }; |
|
BER |
LPF |
= Q{ |
|
2Eb |
}. |
|
||||
|
match |
|
|
N0 |
|
|
|
N0 |
(2BTb ) |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(7.38) |
На рис.7.9 показана зависимость функций BER ошибки |
||||||||||||||
приема |
для |
|
полярного |
и |
униполярного |
сигналов |
при |
|||||||
|
BERmatch ( Eb N0 ) |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
10–1 |
|
|
|
|
|
1 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
–2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10–3 |
|
|
|
|
|
|
|
|
|
|
|
||
|
10–4 |
|
|
|
|
|
|
|
|
|
Eb / N0 , дБ |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
0 |
2 |
4 |
|
|
6 |
8 |
|
10 |
|
|
|
Рис.7.9. Функция BER для полярного (1) и униполярного (2) сигналов |
||||||||||||||
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
использовании согласованного фильтра.
Из рисунка следует, что использование полярного модулирующего сигнала позволяет примерно на 3 дБ уменьшить требуемое соотношение сигнал/шум входного сигнала для получения одной и той же достоверности приема информации по сравнению с униполярным сигналом.
7.5. Функции BER бинарных модулированных сигналов
Приведенные выше примеры расчета функции BER относятся к сигналам в baseband диапазоне (на выходе когерентного детектора). Полученная на выходе детектора импульсная последовательность (детектированный сигнал) с точностью до шумов и искажений в радиоканале совпадает с цифровым модулирующим сигналом в передатчике. Очевидно, что одна и та же детектированная импульсная последовательность может соответствовать модулированным сигналам различного вида. Определение функций BER для различного вида модуляций возможно только с учетом работы детектора, который преобразует модулированный ВЧ сигнал в baseband диапазон.
Далее полагаем, что для детектирования модулированных сигналов используется идеальный когерентный детектор, коэффициент передачи которого равен единице, а собственные шумы - нулю. Первое предположение означает, что энергия модулированного колебания на входе детектора совпадает с энергией импульса в baseband диапазоне. Второе предположение означает, что спектральная плотность мощности шумов N0 не изменяется
при прохождении детектора и может использоваться как
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
для вычисления функции ошибок как при использовании согласованного фильтра, так и при использовании ФНЧ.
Ошибка приема импульсно-модулированного сигнала РАМ определяется расстоянием между символами импульсно-модулированного сигнала в соответствии с
(3.32), (3.33):
|
|
|
|
|
|
|
A2T |
|
|
|
|
|
|
|
d |
kn |
= E |
d |
= |
b |
для униполярного сигнала (A |
= A, A = 0) ; |
|||||||
|
||||||||||||||
|
|
|
2 |
|
k |
|
|
n |
||||||
|
|
|
|
|
|
|
|
|
(7.39а) |
|||||
|
|
|
|
|
|
|
|
|
|
|||||
d |
kn |
= E |
d |
= 2A2T |
для полярного сигнала (A = -A = |
|
A |
|
) . |
|||||
|
|
|||||||||||||
|
|
|
|
|
|
b |
k |
n |
|
|
|
|
||
(7.39б)
Энергия на один бит информации для РАМ сигнала с униполярными импульсами составляет Eb = A2T 4 , для сигнала с полярными импульсами - соответственно Eb = A2T
4 , для сигнала с полярными импульсами - соответственно Eb = A2T  2 . Подставляя (7.39а,б) в (7.30) и заменяя энергию
2 . Подставляя (7.39а,б) в (7.30) и заменяя энергию
импульса средней энергией на бит информации, получим выражения для функций BER когерентного детектирования импульсно модулированного сигнала при согласованной фильтрации:
BER |
= Q{ |
|
Eb |
|
} - для униполярного сигнала; |
|
|||||
match |
|
|
N0 |
||
|
|
|
|||
|
|
|
|
|
(7.40а) |
BERmatch = Q{
 2N× Eb } - для полярного сигнала.
2N× Eb } - для полярного сигнала.
0
(7.40б)
Функция BER при использовании узкополосного ФНЧ определяется по формуле (7.32), соответствующей фильтру низкой частоты, который не сильно искажает форму принимаемого импульса (слабо ограничивает спектр демодулированного сигнала). Для идеального когерентного
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
детектора с коэффициентом передачи 1 амплитуда
импульса в basenand диапазоне будет в 
 2 меньше, чем амплитуда A высокочастотного колебания. В принятых условиях разность значений сигналов на выходе ФНЧ равна
2 меньше, чем амплитуда A высокочастотного колебания. В принятых условиях разность значений сигналов на выходе ФНЧ равна
(s |
− s |
2 |
)2 = |
A2 |
|
- для униполярного сигнала; |
(7.41а) |
|
|||||||
1 |
|
2 |
|
|
|
||
|
|
|
|
|
|
||
(s |
− s |
2 |
)2 = 2A2 |
- для полярного сигнала. (7.41б) |
|
||
1 |
|
|
|
|
|
|
|
Подставляя (7.41а,б) в формулу BER для узкополосного ФНЧ (7.32), получим выражения для функций BER когерентного детектирования импульсно модулированного сигнала при использовании ФНЧ:
BERLPF = Q{ |
|
|
Eb |
|
} |
- для униполярного сигнала; |
||
N0 |
(2BTb ) |
|||||||
|
|
|
|
|
|
|||
(7.42а) |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
BERLPF = Q{ |
|
2Eb |
|
} |
- для полярного сигнала. (7.42б) |
|||
N0 |
(2BTb ) |
|
||||||
|
|
|
|
|
|
|||
Ошибка приема фазомодулированного BPSK сигнала
определяется расстоянием между импульсами в бинарном фазомодулированном сигнале в соответствии с (3.46) для M = 2 , и это расстояние совпадает с расстоянием между сигналами с амплитудно-импульсной модуляцией полярными прямоугольными импульсами. Следовательно, и выражение для функции BER бинарного фазомодулированного сигнала при согласованной или низкочастотной фильтрации совпадет с (7.40б), (7.42б):
|
|
|
|
|
|
|
BER |
= Q{ |
2Eb |
}; BER = Q{ |
2Eb |
}. |
(7.43) |
|
|
|||||
match |
|
|
LPF |
N0 (2BTb ) |
|
|
|
|
N0 |
|
|||
Ошибка приема частотно-модулированного сигнала
(МSK) определяется расстоянием между импульсами бинарного MSK сигнала в соответствии с формулой (3.67):
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
Ed = A2T . Энергия на один бит информации (3.53) равна
A2Tb  2 . Подставляя эти значения в общую формулу для функции BER оптимального фильтра (7.30), получим:
2 . Подставляя эти значения в общую формулу для функции BER оптимального фильтра (7.30), получим:
|
|
A2Tb |
|
|
|
|
|
BER = Q{ |
|
|
} = Q{ |
Eb |
}. |
(7.44) |
|
|
|
||||||
|
|
2N0 |
N0 |
|
|||
Для определения функции BER частотно-модулированного сигнала при использовании низкочастотного фильтра следует учитывать, что полоса частот, занимаемая FM сигналом, существенно шире, чем полоса частот РАМ или РМ сигналов при одинаковой скорости передачи информации. Известно, что ширина полосы частот бинарных РАМ и РМ сигналов между первыми нулями в распределении спектральной плотности мощности равна скорости передачи информации R, а для MSK сигнала составляет 1,5R . Следовательно, для корректного сравнения BER, вычисляемых для одной и той же скорости передачи информации, следует шумовую полосу в уравнении (7.32) увеличить в 1,5 раза. Амплитуда сигнала в baseband
диапазоне, как и для РМ сигнала, в 
 2 меньше, чем амплитуда A высокочастотного колебания. В результате ошибка приема бинарного MSK сигнала при использовании ФНЧ определяется по формуле
2 меньше, чем амплитуда A высокочастотного колебания. В результате ошибка приема бинарного MSK сигнала при использовании ФНЧ определяется по формуле
|
|
|
2A2 |
|
|
|
E |
|
|
|
|
|
BERLPF = Q{ |
|
|
} = Q{ |
b |
}. |
(7.45) |
||||||
4 |
×1,5× N0B |
N0 (1,5 |
× BTb ) |
|||||||||
|
|
|
|
|
|
|
|
|||||
Сигнал MSK имеет минимальную полосу частот среди всех других видов бинарной частотной модуляции. Для бинарного FSK сигнала с разрывной фазой и произвольным индексом модуляции занимаемая полоса частот больше, чем для MSK сигнала, поэтому и ФНЧ должен иметь большую полосу пропускания по сравнению с (7.45):
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
|
BERLPF = Q{ |
|
Eb |
|
}. |
|
(7.46) |
||
|
N0[(2...3) × BTb ] |
|
|||||||
|
|
|
|
|
|
|
|||
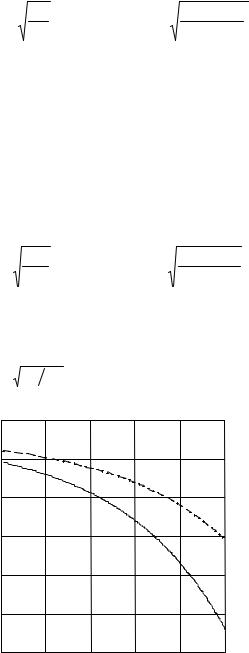
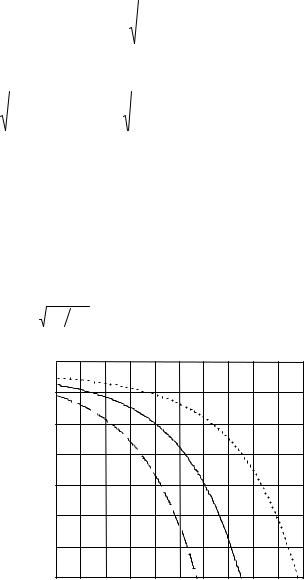
Сравнительная достоверность приема информации для |
|||||||||
сигналов различной модуляции представлена графически |
|||||||||
на |
рис.7.10. |
Здесь |
приведена |
функция |
ошибок |
||||
BER = Q(Eb N0) |
для бинарной |
амплитудной импульсной |
|||||||
PAM, фазовой BPSK и частотной MSK модуляций при |
|||||||||
использовании |
оптимального |
фильтра |
и |
ФНЧ |
с |
||||
|
BER( Eb N0 ) |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
10–1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10–2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10–3 |
|
|
|
|
|
|
|
|
|
10–4 |
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10–5 |
|
|
|
|
|
|
Eb / N0 , дБ |
|
|
10–6 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
0 |
2 |
4 |
6 |
|
8 |
10 |
|
|
Рис. 7.10. Функция BER для бинарной амплитудной, фазовой и частотной |
|||||||||
модуляций: 1 - РАМ и FSK (ФНЧ); 2 - |
BPSK (ФНЧ), РАМ и |
||||||||
FSK(оптимальный фильтр); 3 - BPSK (оптимальный фильтр) |
|
||||||||
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
относительной полосой пропускания BTb =1 .
Сравнение функций BER показывает, что фазовая модуляция BPSK имеет наименьшую ошибку по сравнению с амплитудным и частотным методами модуляции при приеме сигнала с заданным соотношением сигнал/шум. Другими словами, заданная вероятность приема при использовании фазовых методов модуляции достигается при наименьшем соотношении сигнал/шум принимаемого сигнала. При этом следует учитывать, что полученные результаты подразумевают гауссовское распределение шума в радиоканале, что далеко не всегда справедливо. Очень часто в расчетах принимается рэлеевское распределение шума, которому соответствуют значительно более сложные формулы. Но и при такой модели шумов фазовые методы показывают лучшие результаты.
Сравнение результатов расчета функций BER для согласованного и низкочастотного фильтров значительно менее надежно. Достоверность приема информации существенно зависит от выбранной полосы пропускания фильтра. Хотя в любом случае применение оптимального фильтра позволяет получить лучшую достоверность приема, практическая реализация оптимального фильтра достаточно сложна и далеко не всегда оправдывает ожидаемую величину улучшения качества приема. Более того, при использовании некогерентного детектора разница в функции ошибок при использовании согласованного и низкочастотного фильтров еще более уменьшается.
Расчетные формулы для достоверности приема информации при некогерентном детектировании значительно более сложные, чем приведенные выше. Статистика сигналов на выходе некогерентного детектора не остается гауссовской, а переходит в статистику Рэлея или Райсса (обобщенный
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
закон Рэлея). Вместе с тем нет принципиальной разницы между функциями BER для одного и того же типа модулированного сигнала при когерентном и некогерентном детектировании. Зависимости BER(Eb  N0 )
N0 )
для некогерентного детектирования качественно совпадают с зависимостями на рис.7.10, но в среднем показывают ухудшение соотношения сигнал/шум при заданном уровне ошибок примерно на 3 дБ. Однако эта оценка не учитывает неизбежные потери качества детектирования в когерентном детекторе вследствие неточной синхронизации опорного и информационного сигналов. Поэтому реальная разница между достоверностью приема для когерентного и некогерентного детекторов не превышает 2 дБ, а для небольших соотношений сигнал/шум уменьшается еще больше. Более того, функции BER, вычисленные для когерентного и некогерентного детекторов в предположении наличия в радиоканале только белого гауссовского шума, очень приблизительно определяют достоверность приема информации. Как будет показано в следующей главе, достоверность приема информации в радиоканале с федингом существенно уменьшается, изменяется и сам вид зависимостей BER(Eb  N0 ) .
N0 ) .
Таким образом, для оценки качества радиоканала можно пользоваться функциями BER для достоверности приема информации вида (7.28) или (7.30) независимо от типа используемого детектора или статистики шума. При этом выбор типа детектора определяется общими свойствами модулированного сигнала и простотой реализации. Если в радиоканале принят вид модуляции с постоянной огибающей (частотная модуляция), то использование некогерентного детектора безусловно более выгодно. Схема некогерентного детектора намного более простая, дешевая,
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
экономичная и вполне оправдывает небольшую потерю достоверности приема информации. И наоборот, применение спектрально эффективных методов модуляции с непостоянной огибающей (фазовых или амплитуднофазовых) оправдывает применение когерентных детекторов.
7.6. Функции BER многопозиционных модулированных сигналов
Рассмотрим достоверность приема многопозиционных модулированных сигналов в условиях белого гауссовского шума. Как и ранее, полагаем, что для детектирования используется идеальный когерентный детектор с единичной передаточной характеристикой.
Многоуровневая амплитудная модуляция M-PAM
представляет собой импульсно-модулированный высокочастотный сигнал:
s(t) = Am cos wt, |
(7.47) |
амплитуда которого может принимать следующие значения:
Am = (2m -1- M )× d , |
m =1,2.....M . |
(7.48) |
Демодулированный сигнал в baseband диапазоне представляет собой полярный многоуровневый сигнал. Полагаем, что ошибка приема текущего демодулированного символа определяется, как и в случае приема бинарного сигнала (см. рис.7.8), "хвостами" гауссовских кривых распределения плотности вероятности, которые характеризуют вероятность приема других символов, но находятся в области вероятности приема текущего символа. Отличие от ситуации приема бинарного сигнала
P(r|s)
1 |
|
|
|
|
0,8 |
1 |
2 |
3 |
4 |
0,6 |
|
|
|
|
0,4
0,2
0
r
–1 0 1 2 3 4 5
Рис.7.11. Вероятность правильного приема многоуровневого сигнала
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com

заключается в том, что на оси вероятных значений находятся не две вероятностные кривые, а M кривых, характеризующих возможность появления M различных символов. Частный случай распределения плотности вероятности приема четырех символов (M = 4) показан на рис.7.11.
Поскольку возможные значения амплитуд принимаемых сигналов распределены равномерно (7.48) с шагом 2d, то и пороговые значения в приемнике распределены равномерно, на одинаковом расстоянии друг от друга и посередине между ожидаемыми значениями. Для любого ожидаемого значения "внутреннего" символа (2 или 3 на рис.7.11) вероятность ошибочного приема будет в два раза больше, чем в случае приема бинарного символа, так как в области ожидаемых значений принимаемого символа находятся два "хвоста" от вероятных значений соседних символов. Для крайних символов ошибка приема будет совпадать с ошибкой приема бинарных сигналов.
Учитывая, что априорные вероятности принимаемых символов одинаковы, суммарная вероятность ошибочного приема символа при многоуровневой амплитудной модуляции и оптимальной фильтрации определяется в соответствии с (7.30) только разностной энергией принимаемых сигналов (расстоянием между сигналами):
|
1 |
|
|
|
|
|
|
|
|
|
2(M -1) |
Q{ |
d2Ts |
}, |
BER= |
[(M -2)×2Q{ |
Ed |
}+2Q{ |
Ed |
}] = |
|||||||||
M |
2N |
2N |
|
|
||||||||||
|
|
|
|
|
|
|
|
M |
N |
|||||
|
|
|
|
0 |
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(7.49) |
|
где Ed = 12 (2d)2Ts - разностная энергия двух символов.
В соответствии с уравнением (7.48) увеличение числа уровней M в модулированном сигнале при постоянном расстоянии между сигналами приводит к неограниченному
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com

возрастанию амплитуды сигнала, а следовательно, и энергетического потенциала радиолинии. Очевидно, что такая ситуация не соответствует реальности. Поэтому полагаем, что средняя энергия принимаемого сигнала постоянна (не зависит от количества уровней M), а расстояние между уровнями d уменьшается с возрастанием M. Средняя энергия Es на один передаваемый символ
определяется прямым усреднением величины энергии всех возможных символов в (7.48):
|
1 |
M |
2 |
d |
2 |
|
(M |
2 |
2 |
|
|
Es = |
å |
(2m -1- M ) |
|
×Ts = |
|
-1)d Ts |
. |
(7.50) |
|||
M |
2 |
|
|
|
|
6 |
|||||
|
m=1 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Подставляя выражение для расстояния d между символами из (7.50) в (7.49), получим:
|
2(M -1) |
|
|
|
|
2(M -1) |
Q{ |
|
|
|
|
BER= |
Q{ |
6Es |
} = |
6log2(M) × |
Eb |
}, |
|||||
|
(M 2 -1)N0 |
|
|
||||||||
|
M |
|
|
M |
(M 2 -1) |
N0 |
|||||
(7.51)
где Es = Eb log2 (M ) - энергия на один бит многоуровневого
сигнала.
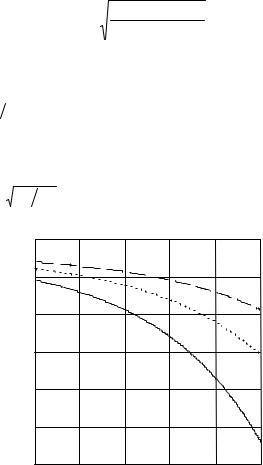
Результаты расчета функции ошибки приема для многоуровневой РАМ модуляции по формуле (7.51) показаны на рис.7.12.
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10–1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10–2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10–3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10–4 |
|
М |
=2 |
|
|
М=4 |
|
М=8 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10–5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10–6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Eb / N0 , дБ |
10–7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
4 |
|
|
8 |
|
|
12 |
16 |
20 |
|||||||||||||
Рис.7.12. Достоверность приема для многоуровневой РАМ
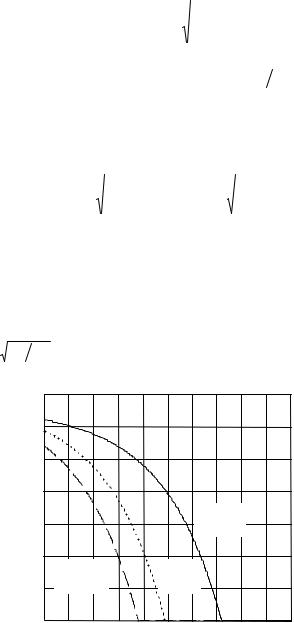
Как следует из рис.7.12, увеличение количества уровней в импульсной амплитудной модуляции очень сильно уменьшает достоверность приема информации. Трехуровневый сигнал ( M = 8 ) должен быть на 10 дБ более мощный, чем бинарный сигнал, для достижения той же самой достоверности приема.
Многоуровневая фазовая модуляция M-PM
характеризуется M равноудаленными значениями фазы несущей частоты:
ϕ = |
2π |
(m −1), |
m =1,2.... M . |
(7.52) |
|
M |
|||||
|
|
|
|
При рассмотрении свойств фазомодулированных сигналов в главе 3 было показано, что символы фазомодулированных сигналов равномерно распределены по тригонометрическому кругу (рис.3.13), имеют одинаковую
энергию Es = A2Ts  2 , а расстояние между сигналами составляет d = Asin(π
2 , а расстояние между сигналами составляет d = Asin(π M ) . Равномерное распределение фазы
M ) . Равномерное распределение фазы
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
несущей частоты на тригонометрическом круге означает, что все ожидаемые значения фазы имеют по два "соседних" распределения вероятности ожидаемого значения (рис.7.11). Следовательно, функция ошибок имеет вид, совпадающий с функцией ошибок для бинарного сигнала:
|
|
|
|
|
BER = Q{ |
d 2Ts |
}. |
(7.53) |
|
|
||||
|
N0 |
|
||
Подставляя в (7.53) значения расстояния d между символами и энергию символа Es , получим:
BER = Q{ |
|
2Es |
|
sin( |
p |
)} = Q{ |
|
2log2 (M ) × Eb |
|
×sin( |
p |
)}. (7.54) |
|
|
|
|
|||||||||
|
|
N0 |
M |
N0 |
M |
|||||||
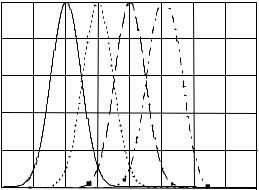
Результаты расчета ошибки приема (7.54) для многоуровневого фазомодулированного сигнала показаны на рис.7.13. Увеличение количества уровней фазы, как и уровней амплитуды сигнала, приводит к повышению величины ошибок. Характер и величина повышением ошибок с ростом количества уровней сигнала для амплитудной и фазовой модуляции существенно не различаются. Особенностью многоуровневой фазовой модуляции является совпадение величины ошибок при
BER( Eb N0 ) |
|
|
|
||
1 |
|
|
|
|
|
10–1 |
|
|
|
|
|
10–2 |
|
|
|
|
|
10–3 |
М=2,4 |
|
М=16 |
|
|
10 |
–4 |
М=8 |
|
||
|
|
|
|
|
|
10–5 |
|
|
|
|
|
10–6 |
|
|
|
|
|
10–7 |
|
|
|
Eb / N0 , дБ |
|
|
0 |
4 |
8 |
12 |
16 |
Рис.7.13. Достоверность приема для многоуровневой PM |
|||||
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
бинарной и четырехпозиционной модуляции. Это совпадение является следствием квадратурной формы когерентного фазового демодулятора - два канала детектора осуществляют независимый прием двух бинарных фазомодулированных сигналов.
Многоуровневая ортогональная частотная модуляция
M-MSK характеризуется использованием M различных частот, расстояние между которыми фиксированно и равно 1 2Ts . Распределение вероятности ошибок будет
2Ts . Распределение вероятности ошибок будет
определяться уравнением (7.49), так как на достоверность приема "внутренних" символов будут влиять два соседних; на крайние символы, соответствующие максимальной
частотной расстройке ± M × fd , будут |
влиять только |
||||||
"внутренние" символы: |
|
|
|
|
|
|
|
BER = |
2(M -1) |
×Q{ |
d 2Ts |
}. |
(7.55) |
||
M |
|
||||||
|
|
|
N0 |
|
|||
Энергия каждого символа постоянна и совпадает с энергией
фазомодулированного символа E |
s |
= A2T 2 , расстояние |
|
s |
между символами определено в уравнении (3.67) и равно dmin2 = A2Ts / 2 . Подставляя эти значения в (7.55), получим
выражение для функции сигнала:
|
2(M -1) |
|
|
|
|
BER = |
×Q{ |
Es |
} = |
||
M |
|
||||
|
|
N0 |
|||
ошибок многоуровневого MSK
2(M -1) |
×Q{ |
log(M ) × Eb |
}. (7.56) |
|
M |
||||
|
N0 |
|||
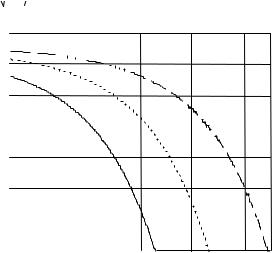
Результаты расчетов функции ошибок для многоуровневого MSK сигнала по (7.56) показаны на рис.7.14. Из рисунка следует, что, в отличие от многоуровневой амплитудной и фазовой модуляции, с увеличением количества частот в многоуровневом ортогональном MSK сигнале вероятность ошибок уменьшается. Уменьшение достоверности приема
BER( Eb N0 ) |
|
|
|
|
|
1 |
|
|
|
|
|
10–1 |
|
|
|
|
|
10–2 |
|
|
|
|
|
10–3 |
|
|
|
|
|
10–4 |
|
|
|
М=2 |
|
10–5 |
|
|
|
|
|
10–6 |
М=32 |
|
М=8 |
|
|
10–7 |
|
|
|
|
Eb / N0 , дБ |
0 |
4 |
8 |
12 |
16 |
20 |
Рис.7.14. Достоверность приема для многоуровневой FM |
|||||
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
цифровых символов для амплитудной и фазовой модуляции с ростом количества уровней M в передаваемом сигнале является прямым следствием уменьшения расстояния между символами сигнала. В предположении постоянной средней мощности передаваемого сигнала при амплитудной модуляции расстояние d между символами уменьшается пропорционально 1 M , как это следует из (7.50).
M , как это следует из (7.50).
Для фазомодулированного сигнала расстояние между символами уменьшается почти по такому же закону: d = sin(π M )≈ 1
M )≈ 1 M . Разумеется, количество бит информации,
M . Разумеется, количество бит информации,
передаваемых каждым символом, увеличивается с ростом числа уровней в сигнале. Но увеличение объема передаваемой информации пропорционально только log2(M ) . В результате отношение сигнал/шум уменьшается
примерно пропорционально log2(M ) M . Соответственно с
M . Соответственно с
увеличением числа уровней в сигнале снижается и достоверность приема информации. Для частотной модуляции MSK с ортогональными сигналами увеличение количества уровней в сигнале не приводит к уменьшению расстояния между символами, которое остается постоянным и равным половине скорости передачи информации. При этом количество бит информации, передаваемых каждым символом, по-прежнему возрастает с ростом количества уровней в сигнале пропорционально log2(M ) . В результате
возрастает энергия сигнала на один бит информации, а вместе с ней и достоверность приема информации.
Следует принимать во внимание, что сравнение амплитудной, фазовой и частотной модуляции (рис.7.12 - 7.14) в принятых условиях не совсем корректно. Увеличение достоверности приема информации для MSK модуляции вовсе не означает, что этот вид модуляции
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com