

- •Мобильные системы радиосвязи
- •Оглавление
- •Введение
- •1. Беспроводные сети связи
- •1.1. Мобильные системы связи
- •1.1.1. Мобильные системы связи первого поколения
- •1.1.2. Мобильные системы связи второго поколения
- •1.1.3. Мобильные системы связи третьего поколения
- •1.2. Общее представление сети связи
- •1.2.1. Модель OSI-7 для открытых сетей связи
- •1.2.2. Уровни модели OSI-7
- •1.2.3. Реализация модели OSI-7 для радиосетей
- •1.3. Функциональная схема сети радиосвязи
- •Заключение
- •2. Цифровые модулирующие сигналы
- •2.1. Представление цифрового сигнала во временной и частотной областях
- •2.2. Виды и параметры цифровых сигналов
- •2.2.1. Виды цифровых сигналов
- •2.2.2. Параметры цифровых сигналов
- •2.2.3. Спектральная плотность мощности цифровых сигналов
- •2.3. Прохождение цифрового сигнала по линейным цепям и межсимвольная интерференция
- •2.3.1. Искажения сигнала в линейных цепях
- •2.3.2. Межсимвольная интерференция
- •2.3.3. Критерий Найквиста
- •2.3.4.Ограничение полосы частот цифрового сигнала
- •Заключение
- •3.Узкополосные модулированные сигналы
- •3.1. Общие свойства модулированных сигналов
- •3.1.1.Определение модулированного сигнала во временной и частотной областях
- •3.1.2. Функциональные схемы модуляторов и демодуляторов
- •3.1.3. Ограничение спектра модулированного колебания
- •3.1.4. Энергия и расстояние между символами модулированного сигнала
- •3.2. Импульсная амплитудная модуляция РАМ
- •3.3. Фазовая модуляция PM
- •3.3.1. Общее представление фазомодулированного сигнала
- •3.3.2. Бинарная фазовая модуляция BPSK
- •3.3.3. Квадратурная фазовая модуляция QPSK
- •3.3.4. Дифференциальная бинарная фазовая модуляция DBPSK
- •3.3.7. Амплитудно-фазовая модуляция QAM
- •3.4. Частотная модуляция FM
- •3.4.2. Частотная модуляция минимального фазового сдвига MSK
- •Заключение
- •4. Модулированные сигналы с расширенным спектром
- •4.1. Сигналы с непосредственным расширением спектра DSSS
- •4.1.1. Основные свойства DSSS сигналов
- •4.1.2. Система связи с DSSS сигналами
- •4.2. Широкополосные сигналы со скачками частоты FHSS
- •4.3. Сверхширокополосные сигналы UWB
- •4.4. Многомерные сигналы
- •4.4.1. Общее описание многомерных сигналов
- •4.4.2. Многомерная ортогональная частотная модуляция OFDM
- •Заключение
- •5. Синтез и преобразование частот
- •5.1. Функциональная схема ФАПЧ и синтезатора частоты
- •5.2. Основное уравнение синтезатора частоты
- •5.3. Параметры синтезатора частоты
- •5.3.1. Полоса удержания (захвата)
- •5.3.2. Ошибка частоты и фазы в установившемся режиме
- •5.3.3. Переходные характеристики и время установления частоты
- •5.3.5. Устойчивость
- •5.4. Частотная модуляция в синтезаторе частоты
- •5.5. Преобразование частоты в петле ФАПЧ
- •Заключение
- •6. Распространение радиоволн в условиях города
- •6.1. Методы анализа распространения радиоволн
- •6.2. Расчет дальности радиосвязи в модели "большого расстояния"
- •6.2.1. Расчет дальности связи по методике МККР
- •6.2.3. Расчет теневых зон радиосвязи
- •6.2.4. Распространение радиоволн внутри здания
- •6.3. Анализ распределения поля в модели "малого расстояния"
- •6.3.1. Энергия принимаемого сигнала в многолучевом радиоканале
- •6.3.2. Параметры многолучевого канала
- •6.3.3. Типы фединга в многолучевом канале
- •Заключение
- •7. Детектирование и прием цифровых сигналов
- •7.1. Критерий максимального правдоподобия
- •7.2. Корреляционный и согласованный прием
- •7.3. Согласованный фильтр
- •7.4. Достоверность приема бинарной цифровой информации в условиях белого гауссовского шума
- •7.7. Когерентное детектирование
- •7.7.1. Когерентное детектирование BPSK сигнала
- •7.7.2. Схема Костаса оптимального детектирования сигналов с угловой модуляцией
- •7.8. Тактовая синхронизация
- •Заключение
- •Прием сигналов в условиях фединга
- •8.1. Разнесенный прием в широкополосных каналах
- •8.1.1. Статистика принимаемых сигналов
- •8.1.2. Достоверность приема информации
- •8.1.3. Методы реализации разнесенного приема
- •8.2.1. Общие принципы работы эквалайзера
- •8.2.2. Линейный и нелинейный эквалайзеры
- •8.3. Интерливинг
- •Заключение
- •9. Стандарты на радиоканал мобильной связи
- •9.1. Требования к параметрам передатчика
- •9.2. Требования к параметрам приемника
- •Заключение
- •Литература
|
N0 |
ò |
|
|
Λ = exp{− |
1 |
|
[r(t) − sm (t)]2 dt }. |
(7.6б) |
|
|
Функция правдоподобия (7.6) является основой для построения оптимальных детекторов, схем тактовой и высокочастотной синхронизации и последетекторной обработки сигналов.
7.2. Корреляционный и согласованный прием
Определим оптимальную структуру порогового устройства (см. рис.7.1), выполняющего функцию обнаружителя сигналов. Предполагается, что принятый высокочастотный модулированный сигнал выделен из общего радиоспектра в линейной части приемника. В детекторе осуществлено преобразование спектра модулированного колебания в baseband диапазон. После прохождения низкочастотного фильтра из спектра демодулированного сигнала удалены побочные продукты детектирования и сформирована оптимальная полоса цифрового сигнала в basebandдиапазоне. Пороговое (решающее) устройство по входному сигналу должно определить, какой именно символ принят на текущем временном интервале.
Полагаем, что на выходе детектора приятый сигнал r(t) в baseband диапазоне представляет собой аддитивную смесь идеального (ожидаемого) сигнала s(t) и шума n(t) . Для
построения оптимальной структуры решающего устройства используем функцию правдоподобия в логарифмическом виде, определенную в (7.6б). Первое слагаемое в разложении квадратичной формы не зависит от параметров ожидаемого сигнала sm (t) , одинаково для всех символов и
поэтому может быть опущено. Следовательно,
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
логарифмическая форма представления функции правдоподобия может быть записана в виде
Λlog = |
2 |
T s r(t)sm (t) dt − |
Em |
, |
(7.7) |
N0 |
|
||||
|
ò |
N0 |
|
||
|
|
0 |
|
|
|
Ts
где Em = òsm2 (t)dt - энергия ожидаемого символа.
0
Таким образом, для оптимального обнаружения цифрового сигнала в условиях аддитивного белого гауссовского шума должно быть аппаратурно реализовано максимальное значение функции правдоподобия вида (7.7). Функциональная схема решающего устройства,
|
|
|
Ts |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выбор |
|
|
|
|
|
|
|
Σ |
|
||
|
|
|
ò |
|
|
|
|
||
|
|
|
0 |
|
|
|
|
|
максимального |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
r(t) |
|
|
|
|
|
|
|
|
значения |
|
s1(t) |
|
t=Ts |
E1/N0 |
|||||
|
|
|
|||||||
|
|
|
|
||||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Ts |
|
|
|
|
|
|
|
|
ò |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
Σ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
sM(t) |
|
|
t=Ts |
EM/N0 |
|
||
|
|
|
|
|
|||||
Рис.7.2. Оптимальный корреляционный прием цифрового сигнала
обеспечивающая максимальное значение функции правдоподобия (7.7), показана на рис.7.2.
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
Демодулированный baseband сигнал r(t) с выхода
детектора разделяется на М каналов - по числу ожидаемых состояний сигнала (различных символов). В соответствии с формулой (7.7) на перемножители каждого канала поступают ожидаемые сигналы sm (t) из ансамбля {sm},
который определяется принятым видом модулирующего сигнала. Результат перемножения поступает на интегратор, и в момент t = Ts окончания символьного интервала
происходит считывание результата интегрирования. В сумматоре полученный результат интегрирования нормируется на величину 2 N0 и складывается с
N0 и складывается с
величиной, равной энергии ожидаемого сигнала Em  N0 . В
N0 . В
случае приема сигнала с импульсами, имеющими равные энергии, этот компонент приемника может отсутствовать. Сигналы от каждого из M каналов поступают в решающее устройство, которое сравнивает по величине эти сигналы. Максимальное значение сигнала на выходе m-го канала в момент времени означает, что sm символ принят на
завершимся символьном интервале.
Пример. Полагаем, что принимается униполярный сигнал r(t) с амплитудами импульсов A и 0. В первом канале на перемножитель поступает ожидаемое значение символа A, на сумматор - значение энергии ожидаемого символа A2Ts .
Во втором канале на перемножитель поступает ожидаемое значение символа 0, на сумматор - значение энергии ожидаемого символа 0; соответственно на втором входе решающего устройства всегда будет нулевое значение. При приеме символа с нулевой амплитудой результат интегрирования в первом канале равен нулю, значение сигнала на входе решающего устройства после сумматора
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
равно − A2Ts ; при приеме символа с амплитудой A результат интегрирования равен 2A2Ts , величина сигнала на входе
решающего устройства после сумматора равна A2Ts . Сравнивая постоянное нулевое значение сигнала на втором канале с величиной сигнала в первом канале ± A2Ts ,
решающее устройство определяет значение принимаемого символа.
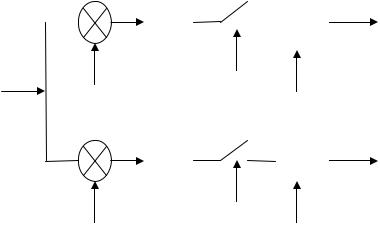
Иная форма аппаратурной реализации функции максимального правдоподобия основана на использовании оптимальной фильтрации. Главная идея оптимальной фильтрации состоит в том, что вместо перемножителя принятого сигнала r(t) на ожидаемый сигнал в
каждом канале схемы на рис.7.2 используется фильтр с импульсной характеристикой, согласованной с временной формой ожидаемого сигнала:
hm (t) = sm (Ts − t). |
(7.8) |
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com

|
1 |
|
|
|
максимального |
|
|
|
|
|
|
r(t) |
|
|
|
|
значения |
|
|
t=Ts |
E1/N0 |
||
|
|
|
|||
hM(t) Σ
t=Ts  EM/N0
EM/N0
Рис. 7.3. Оптимальный согласованный прием цифрового сигнала
Фильтр, импульсная характеристика которого согласована с временной формой ожидаемого сигнала, называется согласованным фильтром. Функциональная схема приемника с согласованной фильтрацией показана на рис.7.3. Сигнал на выходе согласованного фильтра, как и любого линейного устройства, равен значению интеграла свертки в выделенный момент времени. Следовательно, сигнал от
каждого канала на входе решающего устройства определяется следующим уравнением:
T |
Em |
|
|
|
Λ = òs r(τ)hm (t − τ) dτ − |
. |
(7.9) |
||
|
||||
0 |
N0 |
|
||
|
|
|
||
Очевидно, что уравнение (7.9) с учетом (7.8) полностью совпадает с уравнением для функции правдоподобия (7.7). Следует подчеркнуть два важных вывода, которые следуют из сравнения функциональных схем оптимального приема
(рис.7.2 и 7.3):
∙обе схемы принципиально обеспечивают одинаковый результат приема сигнала. Поэтому все свойства согласованного фильтра, рассмотренные
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
ниже, в той же степени относятся и к его корреляционной реализации;
∙оптимальный прием цифровых сигналов, как корреляционный, так и с помощью согласованного фильтра, требует тактовой синхронизации. Время интегрирования принятого сигнала должно точно совпадать с реальной длительностью принимаемого импульса цифрового сигнала. В противном случае возникает межсимвольная интерференция как результат влияния соседних импульсов на результат
интегрирования.
Варианты схемы оптимального приемника, показанные на рис.7.2, 7.3, иллюстрируют непосредственную аппаратурную реализацию функции максимального правдоподобия. Однако практическая реализация M- канального оптимального приемника, предназначенного для приема M-позиционного модулированного сигнала, приводит к очень сложной и громоздкой схеме. Оптимальный приемник может быть построен значительно более простым способом, если воспользоваться ортогональным представлением принимаемых сигналов.
Известно, что любой сигнал может быть представлен в виде линейной взвешенной суммы ортогональных функций:
N |
|
sm (t) = åakmΨk (t), |
(7.10) |
k =1
где коэффициенты akm разложения m-го символа по N
ортогональным функциям определяются |
следующим |
выражением: |
|
Ts |
|
akm = òsm (t)Ψk (t) dt. |
(7.11) |
0 |
|
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
Количество ортогональных функций в любом случае меньше или равно количеству символом в M-позиционном цифровом сигнале. В частном случае M = N ортогональные функции почти совпадают с временной формой импульсов в символе цифрового сигнала, как это показано в разделе 2.2. Именно этому случаю и соответствует корреляционная (см. рис.7.2) или фильтровая (см. рис.7.3) схема оптимального приемника. Другой очевидный пример ортогональных функций - гармонические колебания sin(2pkt Ts ) и cos(2pkt
Ts ) и cos(2pkt Ts ) .
Ts ) .
Однозначное определение каждого импульса s(t) в M- позиционном сигнале с помощью ортогональных функций позволяет по коэффициентам разложения amk определить
значение импульса, принимаемого в текущий момент времени.
Для определения функциональной схемы оптимального приемника, основанного на разложении импульсов цифрового сигнала по ортогональным функциям, конкретизируют функцию максимального правдоподобия для коэффициентов разложения. Подставим выражение для коэффициентов разложения по ортогональным функциям (7.10) в уравнение максимального правдоподобия (7.7):
|
2 |
|
T s |
N |
|
|
|
|
Em |
|
|
||||||
Llog = |
|
× òr(t) ×åakm ×Yk (t) dt - |
= |
|
|||||||||||||
|
N |
0 |
|
N |
0 |
|
|
||||||||||
|
|
|
|
|
0 |
k =1 |
|
|
|
|
|
|
|
|
|||
|
2 |
|
|
N |
Ts |
|
|
|
|
Em |
|
|
|
||||
= |
|
×åakm × òr(t) ×Yk (t) dt - |
|
= |
(7.12) |
||||||||||||
|
N0 |
|
|
||||||||||||||
|
|
|
|
k =1 |
0 |
|
|
|
|
N0 |
|
|
|||||
|
2 |
|
|
N |
|
Em |
|
|
|
|
|
|
|
||||
= |
|
× |
å |
akm ×akj - |
, |
|
|
|
|
|
|||||||
|
N |
|
|
|
|
|
|
|
|
||||||||
|
|
0 |
|
|
|
N |
0 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
k =1 |
|
|
|
|
|
|
|
|
|
||
где akm - коэффициенты разложения |
по |
ортогональным |
|||||||||||||||
функциям m-го ожидаемого сигнала; akj - коэффициенты
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
разложения по ортогональным функциям j-го принимаемого сигнала.
Из уравнения (7.12) следует, что для реализации оптимального приемника необходимо разделить принимаемый сигнал r(t) на N каналов, в каждом канале
реализовать умножение принимаемого сигнала на соответствующую ортогональную функцию Ψk (t) и
проинтегрировать на временном интервале Ts. Тем самым будут вычислены коэффициенты разложения akj -го
принятого сигнала по ортогональным функциям. Коэффициенты разложения akm всех M ожидаемых
импульсов заранее вычислены и известны. В решающем устройстве производится вычисление функции правдоподобия по формуле (7.12) для каждого m-го ожидаемого сигнала. Считается, что на текущем временном интервале Ts принят тот m-й символ, для которого значение функции правдоподобия максимально.
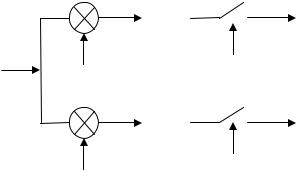
Функциональная схема приемника, реализующего оптимальное определение значения принятого символа с использованием ортогональных функций в соответствии с (7.12), показана на рис.7.4. В отличие от схемы на рис.7.2 количество корреляторов равно количеству ортогональных функций, а не количеству ожидаемых символов.
|
T |
|
a1 |
|
|
|
Определение |
||
|
òs |
|
||
|
0 |
|
|
принятого |
r(t) |
|
|
t=Ts |
символа |
|
|
|
||
Y1(t) |
|
|
|
|
|
T |
|
aN |
|
|
òs |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
t=Ts |
|
YN (t) |
|
|
||
|
|
|
||
Рис.7.4. Прием цифровых сигналов с помощью ортогональных
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com