

147
а) q = 10 кН×м |
|
|
|
P = 20 кН |
MC = 70 кН×м |
|
|
|
1 |
VB = 7,5 кН |
|
|
|
|
|
|
|
|
|
|
A |
|
v1 3 м |
B |
|
C |
|
3 м |
|
2 м |
2 м |
|||
VA=22,5 кН |
|
|
|
|
VC = 27,5 кН |
|
|
|
1 |
|
|
|
70 |
|
|
|
|
|
|
|
|
|
|
|
15 |
|
|
MP |
|
|
|
|
|
|
25,31 |
23,5 |
|
|
|
|
|
б) |
|
P1 |
= 1 |
2 м |
|
|
|
|
|
|
|||
|
|
|
|
|
||
3 м |
|
|
3 м |
1,0 |
|
2,0 |
М11С |
М12С |
М13С |
|
|
||
|
|
|
||||
М1 |
|
|
|
М14С |
М15С |
М16С |
|
|
|
|
|||
|
|
1,5 |
|
|
|
с6 |
с2 |
|
|
с3 |
|
|
|
|
|
|
|
с4 |
с5 |
|
с1 |
|
М2 = 1 |
|
|
|
|
в) |
|
|
|
|
||
М21с М22 |
с 0,5 |
|
с |
М25с |
с |
|
|
|
|
М24 |
|
М26 |
|
М2 |
|
|
|
|
|
|
|
|
0,5 |
М23с |
|
|
0,66 |
|
|
|
|
0,33 |
||
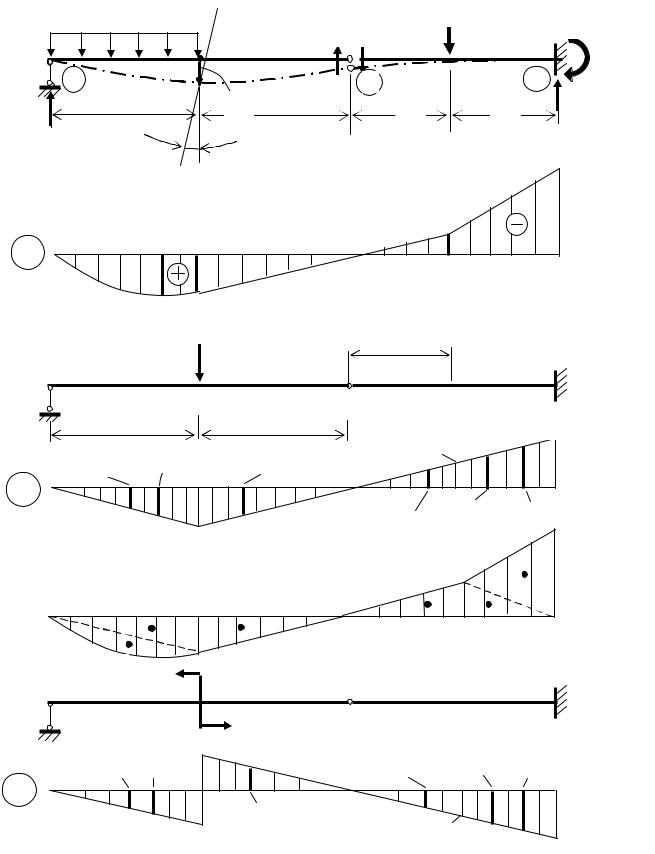
Рис. 6.15. Определение перемещений методом Максвелла – Мора

148
D1p |
= v1 |
= å |
wpn M1nc |
= |
|
1 10 × 33 |
× |
1,5 |
+ |
23,5 × 3 |
× |
2 ×1,5 |
+ |
23,5× 3 |
× |
2 ×1,5 |
+ |
||
|
|
|
[ |
|
|
|
|
|
|
||||||||||
EJ |
|
×104 |
12 |
2 |
2 |
3 |
2 |
3 |
|||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|||||||||
+(-152× 2) × (- 23×1) + (-152× 2) × (- 23×1 - 13× 2) + (- 702× 2) × (-13×1 - 23× 2)] =
=0,011м =1,1см.
|
|
|
|
wpn |
|
2nc |
1 10 × 33 |
|
0,5 |
|
23,5 × 3 |
|
2 × 0,5 |
|
23,5 × 3 |
|
2 × 0,5 |
|
||||||
|
|
|
|
M |
|
|
|
|
|
|
||||||||||||||
D2p |
= q1 |
= å |
|
|
|
= |
|
|
[ |
|
× |
|
|
+ |
|
|
× |
|
+ |
|
(- |
|
) + |
|
EJ |
|
|
×104 |
12 |
2 |
|
2 |
|
3 |
2 |
3 |
|||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||||||||||
|
+ (- |
15 × 2) 2 × 0,333 |
+ (-15 × 2) × ( |
2 × 0,333 + |
0,666)]= - 0,22 ×10−3 рад. |
|
||||||||||||||||||
|
|
|
2 |
|
3 |
|
|
|
|
2 |
|
|
3 |
|
3 |
|
|
|
|
|
|
|||
Отметим, что отрицательное значение D2p соответствует повороту сечения (1) по часовой стрелке, то есть в сторону, противоположную
единичной паре M2 = 1 (см. рис. 6.15, в). При перемножении эпюр надо
учитывать знаки wp и Mic . Кроме этого надо помнить, что разделение
грузовой эпюры на простые элементы зависит от места приложения единичной нагрузки и поэтому может меняться для разных перемещений.
6.8. Расчет статически неопределимых систем методом сил
Как известно из теоретической механики, статически определимой называется система, в которой опорные реакции и внутренние усилия можно определить с помощью только уравнений равновесия. В противоположном случае системы являются статически неопределимыми. Степень статической неопределимости таких систем k определяется как разность между числом неизвестных реакций m и числом возможных независимых уравнений статики n:
k = m − n. |
(6.19) |
Степень статической неопределимости равна количеству лишних связей в системе с точки зрения ее статической определимости.
|
|
|
|
|
|
|
|
|
|
|
149 |
|
|
|
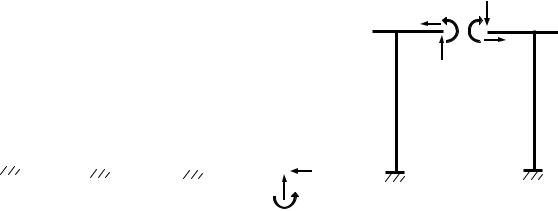
а) k = m – n = 6 – 3 = 3 б) |
|
|
|
в) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.16. Статически неопределимая рама (а) и ее основные системы (б, в)
Одним из методов расчета статически неопределимых систем является метод сил. Он состоит в том, что за основные неизвестные задачи принимаются реакции лишних связей. При расчете используется основная система, которая получается из заданной путем отбрасывания лишних связей. Для любой заданной конструкции существует возможность создания бесконечного множества основных систем (рис. 6.16), так как можно отбрасывать не только внешние связи, но и внутренние путем постановки шарниров или сквозных разрезов.
Основная система должна быть статически определимой и геометрически неизменяемой. Геометрическая неизменяемость состоит в том, что перемещения точек системы возможны только за счет деформаций ее элементов.
Центральной процедурой метода сил является раскрытие статической неопределимости, которое заключается в определении основных неизвестных – реакций лишних связей. Для этого составляются канонические уравнения метода сил – уравнения деформаций. Смысл их состоит в том, что перемещения в основной системе от заданной нагрузки и реакций лишних связей должны быть такими же, как и в заданной конструкции.
Уравнение деформации для i-й лишней связи в методе сил имеет
вид
δi1 X1 + δi2 X2 + + δii Xi + + δik Xk + ip = 0, |
(6.20) |
150
где δij – единичное перемещение (перемещение в направлении i-й лишней связи от действия единичной реакции j-й лишней связи X j = 1); Xi – реакция i-й лишней связи; ip – грузовое перемещение (пе-
ремещение в направлении i-й лишней связи от заданной нагрузки). Количество уравнений деформаций, которые обычно называют
каноническими уравнениями метода сил, равно степени статической неопределимости конструкции. В общем виде система этих уравнений может быть записана в матричном виде
|
|
[δ]{X}+ { |
p }= 0, |
(6.21) |
где [δ] – |
матрица |
единичных |
перемещений размерностью |
k×k; |
{X}, { p }− |
векторы реакций лишних связей (основных неизвестных) и |
|||
грузовых перемещений с размерностью каждого k×1. |
|
|||
Перемещения δij |
и ip в стержневых конструкциях, работающих |
|||
на изгиб, обычно определяются методом Максвелла – Мора по формулам
|
|
|
i |
|
j |
|
|
|
|
i Mp |
|
|
dij = ò |
|
M |
M |
ds; |
Dip = ò |
|
M |
ds, |
(6.22) |
|||
|
EJ |
|
EJ |
|||||||||
(L) |
|
(L) |
|
|
||||||||
где Mi , M j – изгибающие моменты в основной системе от действия единичных реакций i-й и j-й связи Xi = X j = 1 (единичные моменты); Mp – изгибающий момент в основной системе от заданной нагрузки
(грузовой момент).
После решения системы уравнений (6.21) и нахождения основных неизвестных Xi внутренние усилия в конструкции могут быть найдены обычными способами. Определение изгибающих моментов удобно выполнять по принципу независимости действия сил (суперпозиции) с использованием единичных и грузовых моментов
M = M1 × X1 + M2 × X2 + M3 × X3 + + MK × XK + Mp . (6.23)
Пример 6.4.
Раскрыть статическую неопределимость рамной конструкции, показанной на рис. 6.17, и построить эпюры внутренних усилий.