

115
5.Геометрические характеристики сечений
5.1.Статические моменты и центр тяжести сечения
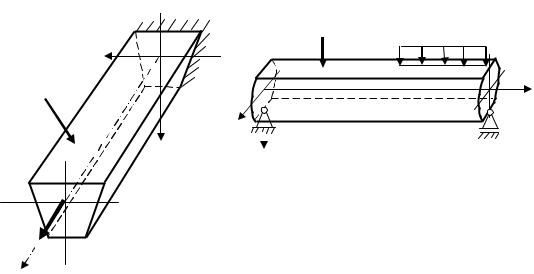
Эксперименты показывают, что поведение стержня под нагрузкой существенно зависит от формы и размеров его поперечного сечения. Учет этих обстоятельств производится путем выбора системы координат в центре тяжести поперечного сечения и использования главных осей этого сечения (рис. 5.1).
С этими локальными осями поперечного сечения связан ряд особых характеристик, называемых геометрическими. Наиболее простая из них – площадь поперечного сечения F – используется в расчетах при растяжении и сжатии. При выполнении расчетов при изгибе и кручении возникает необходимость в более сложных геометрических характеристиках.
Для решения большинства задач сопротивления материалов инженеру необходимо уметь определять положение центра тяжести поперечного сечения, главных осей x и y и главных моментов инерции Jx и Jy. Положение центра тяжести находится с помощью статических моментов сечения Sx и Sy.
а) |
б) |
P |
q |
|
|
||
|
x |
|
|
P1 |
|
|
|
|
|
z |
y |
x |
|
y |
||
|
||
P2 |
|
|
z |
|
Рис. 5.1. Схемы загружения стержней
и главные оси поперечных сечений стержней x и y
116
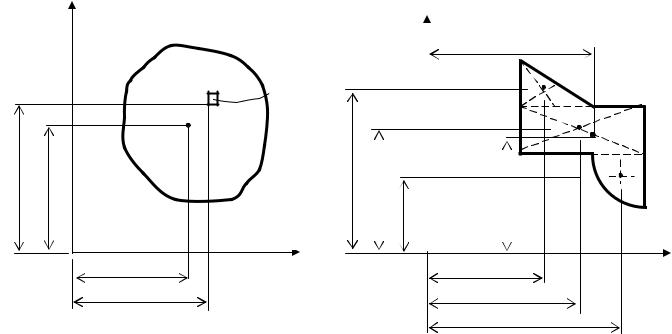
Статическими моментами сечения относительно некоторых осей x и y (рис. 5.2) называют взятые по всей площади F суммы произведений элементарных площадок dF на их расстояния до этих осей, т.е.
Sx |
= ò y dF; |
Sy = ò x dF, |
(5.1) |
|
(F) |
(F) |
|
где x, y - текущие координаты элемента площади сечения dF. Статические моменты фигуры могут быть найдены по формулам
(см. рис. 5.2, а)
Sx = F yC ; Sy = F xC , |
(5.2) |
где F – площадь фигуры; xC, yC – координаты центра тяжести (С) фигуры.
|
a) |
y |
б) |
|
y′ |
xc′ |
|
|
|
|
|
|
|
|
|
|
|
|
d F |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
2 |
C |
у |
yC |
|
y1′ |
y2′ y3′ |
|
|
3 |
|
|
|
|
|
yC′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
x1′ |
x′ |
|
|
|
xC |
|
|
|
|
|
|
|
x |
|
|
x2′ |
|
|
|
|
|
|
|
x3′ |
|
Рис. 5.2. Общий вид заданного сечения
С другой стороны, статические моменты, как и все геометрические характеристики сечения, обладают свойством аддитивности, то есть их можно находить как сумму статических моментов отдельных частей сечения в виде геометрически простых фигур. Этим свойством
117
широко пользуются на практике, заменяя интегрирование простым суммированием и вычисляя статические моменты по формулам (рис. 5.2, б)
Sx = åSxi = å Fi yi ; Sy = åSyi = å Fi xi , |
(5.3) |
где Fi – площади простых элементов (фигур) сечения; xi, yi – координаты центров тяжести отдельных простых элементов.
В этом случае нахождение центра тяжести сложного сечения выполняется в следующем порядке:
1.сложное сечение разбивается на простые элементы;
2. выбираются произвольные вспомогательные оси x¢ и y¢; 3.определяются площади Fi простых элементов сечения и коор-
динаты их центров тяжести xi¢ и yi¢ относительно вспомогательных осей;
4. определяются координаты центра тяжести всего сечения относительно вспомогательных осей по формулам
′ |
S′y |
|
å Fi x′i |
′ |
S′x |
|
å Fi y′i |
|
|
xC = |
|
= |
|
; yС = |
|
= |
|
. |
(5.4) |
F |
å Fi |
F |
å Fi |
Простыми элементами считаются такие, для которых определение площади и положения центров тяжести можно выполнить по справочным данным. Сведения такого рода можно найти в специализированных справочниках по расчету конструкций. В дальнейшем оси x и y, проходящие через центр тяжести сечения, будем называть центральными.
5.2. Моменты инерции плоских сечений. Главные моменты инерции и главные оси
Исключительно важную роль в механике стержневых конструкций играют моменты инерции поперечных сечений стержней. Они бы-
вают трех типов: осевые Jx, Jy, центробежные Jxy и полярные Jρ, и определяются в общем случае по формулам (см. рис. 5.2, а)
Jx = ò y2 dF; J y = |
ò x2 dF; Jxy = |
ò x y dF; |
|
|
(F) |
|
(F) |
(F) |
|
Jρ = ò r2 dF= ò (x2 + y2 ) dF= Jx + J y . |
(5.5) |
|||
(F) |
(F) |
|
|
|
118
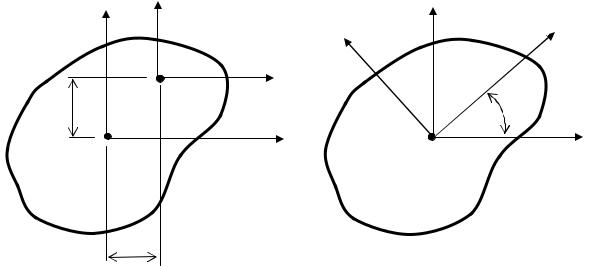
Моменты инерции при переносе осей меняются. Так при параллельном переносе центральных осей x и y сечения в точку с координатами x1 и y1 (рис. 5.3, а) выполняются зависимости
Jx1 = Jx + F y12 ; Jy1 = J y + F x12 ; Jx1,y1 = Jxy + F x1 y1 . |
(5.6) |
При повороте осей на угол α (рис. 5.3, б) моменты инерции относительно новых осей будут равны
Jx1 = Jx cos2 α + J y sin2 α − Jxy sin 2α, |
|
||
J y1 = Jx sin2 α + J y cos2 α + Jxy sin 2α, |
(5.7) |
||
Jx1,y1 = |
Jx − J y |
sin 2α + Jxy cos 2α. |
|
2 |
|
||
|
|
|
|
а) |
|
|
б) |
|
y |
y1 |
|
y |
x1 |
|
|
x1 |
y1 |
|
|
|
|
|
|
y1 |
1 |
|
|
α |
|
|
|
||
C |
|
x |
C |
x |
x1
Рис. 5.3. Схемы к определению моментов инерции при параллельном переносе (а) и повороте (б) осей
Заменяя интегрирование простым суммированием и используя свойство аддитивности, с помощью зависимостей (5.6) и (5.7) можно определять моменты инерции сложных сечений:

119
J |
x |
= å J |
xi |
+ å F y2 |
; J |
y |
= å J |
yi |
+ å F x2 |
; J = å J |
xi,yi |
+ å F x |
i |
y |
, (5.8) |
|
|
|
i |
i |
|
|
i i |
xy |
i |
i |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
|
Jxi , Jyi , Jxi,yi |
- моменты инерции простых элементов сечений отно- |
|||||||||||||
сительно их собственных центральных осей; xi |
, yi |
– координаты цен- |
||||||||||||||
тров тяжести простых элементов относительно центральных осей всего сечения.
Ранее говорилось, что при повороте осей на угол a (рис. 5.3, б) новые значения моментов инерции определяются по формулам (5.7). Легко видеть, что величины моментов инерции Jx1 и Jy1 относительно повернутых осей являются периодическими функциями от угла поворота a и поэтому будут иметь экстремальные значения при некоторых
значениях a0 и a0'. Оси, определяемые этими углами, в теории геометрических характеристик называют главными. Осевые моменты инерции относительно главных осей называют главными – Jmax и Jmin . Центробежный момент инерции относительно главных осей равен нулю. Зна-
чение угла a0, определяющего положение главных осей инерции, можно найти из уравнения
tg2a0 |
= - |
2 Jxy |
, |
(5.9) |
||
Jx |
- J y |
|||||
|
|
|
|
|||
а угол a0′ = a0 + 900 в соответствии с условием взаимной перпендикулярности главных осей. Величины главных моментов инерции
можно определить подстановкой найденных значений a0 и a0′ в две первые формулы (5.7) или по формуле
|
Jx + J y |
|
1 |
|
|
|
|
|
Jmax = |
± |
(Jx - J y )2 |
+ 4 J2xy . |
(5.10) |
||||
2 |
2 |
|||||||
min |
|
|
|
|
|
|||
Если используется формула (5.10), то угол a0 определяет положение оси max (u), если Jx > Jy. В случаях, когда размеры сечения вдоль осей max (u) и min (v) существенно отличаются, может помочь свойство вытянутости сечения вдоль оси min. В самом общем случае положение главных осей можно найти из условия экстремальности Jx(a) при a = =maxa0.(u):Если выполняется условие (5.11), то угол a0 задает положение оси
d2Jx1(a) |
< 0. |
(5.11) |
|
da2 |
|||
|
|