

7.2. Вычислительная программа «Интэл»
Универсальная программа «Интэл» определяет напряженно-деформи-рованное состояние технических балок, подкрепленных канатными элементами в виде кабелей и вант. Алгоритм реализует метод граничных интегральных уравнений в одномерной постановке [18].
Написанная на алгоритмическом языке Fortran-90, программа предназначена для многовариантного моделирования комбинированных систем на начальном этапе проектирования, а также для курсового и дипломного проектирования как учебно-обучающая.
В частной постановке «Интэл» ориентирована на уточненное решение различных задач мостостроения.
7.2.1. Общие сведения
Программа описывает комбинированные системы (КС), состоящие из балок, пилонов и анкерных массивов, соединенных между собой канатными элементами (КЭ):
прямолинейными оттяжками и криволинейными кабелями;
прямолинейными / провисающими сдвоенными вантами.
Число перечисленных параметрических элементов может быть произвольным. КС строится из этого набора деталей «конструктора». При этом не требуется создавать конечно-элементную дискретизацию, так как алгоритм программы основан на интегральных зависимостях, решаемых в аналитическом виде.
В зависимости от компоновки указанных элементов формируются системы: балочная, балочно-вантовая, балочная-кабельная (висячая), много-кабельная, арочно-кабельная, висячая, усиленная вантами.
«Интэл» не учитывает такие особенности висячих систем, как
продольное перемещения узлов кабеля;
удлинение и наклон подвесок, их дискретность;
локальный прогиб балки между креплением подвесок;
упругое обжатие балок и пилонов.
Программа характеризуется:
простотой исходных данных и наглядной топологией моделей;
отсутствием дискретизации для элементов расчетных схем;
параметрическим описанием сложных многокабельных систем.
Программа позволяет моделировать поэтапный монтаж многокабельных систем:
возможность последовательного включения – исключения кабелей / вант из расчетной схемы без удаления записей в исходных данных;
учет дополнительного воздействия на балку в ходе монтажа кабелей со стороны подвесок.
7.2.2. Функциональное описание программы
Программа «Интэл» работает под управлением операционной системы Windows-9x, но не использует диалоговые окна.
Основные функции и этапы работы программы:
вводит исходные данные в виде текстовых файлов (*.txt);
выводит исходную информацию в текстовые файлы (*.b_1);
кодирует данные в формат (*.neu) для последующего МКЭ моделирования программой "FEMAP";
вычисляет функции влияния узловых неизвестных для балок и пилонов;
вычисляет геометрические параметры для криволинейных кабелей и сдвоенных вант;
строит матрицы влияния отдельно для каждой балки и пилона с учетом граничных условий;
решает систему линейных уравнений (СЛАУ) и находит основные узловые неизвестные;
дополняет СЛАУ разрешающими уравнениями принципа Лагранжа для всех кабелей / вант в нелинейную систему;
решает нелинейную систему методами сложной итерации и находит усилия в кабелях / вантах;
определяет внутренние усилия в «информационных» точках (ИТ) балок;
выводит результаты решения для нагружений в текстовый файл (*.b_2).
Программа строит эпюры в табличной и графической формах для балок и пилонов: прогибов, углов поворота сечений, изгибающих моментов и перерезывающих сил, а также усилий в подвесках.
"Интэл" контролирует правильность исходных данных как по отдельности, так и во взаимной связи недопустимых ситуаций. При их обнаружении на экран или в файл протокола выдается сообщение: номер «ошибочной» строки таблицы данных, код ошибки и пояснение. Дальнейшее решение программы прерывается. Наиболее характерны нарушения области допустимых значений (ОДЗ) управляющих символов, неправильная нумерации узлов и элементов, отсутствие физического смысла в параметрах, нестыковки топологии и превышение максимальных размеров векторов.
В прил. 2 приведен список допустимых значений исходных данных. Программа также ведет контроль за конструктивной нелинейностью кабелей, вант и балочных элементов.
Возможности программы зависят от объема оперативной памяти ЭВМ и сложности КС. Учебная программа допускает следующие параметры системы (в скобках – данные для полной версии):
отдельных балок – 2 (5); элементов на балке – 20; ИТ на элементе – 50;
пилонов – 2 (4); уровней на пилоне – 5 (10); анкерных массивов (АМ) – 10;
кабелей / арок – 3 (6); ветвей на кабеле – 3 (5); сдвоенных вант – 10;
расчетных сочетаний – 5; нагрузок в сочетании – 10.
Расчет модели по МГИУ состоит из следующих этапов:
выбора расчетной схемы и глобальной системы координат;
параметрического описания элементов схемы. При необходимости балка и пилоны разбиваются на элементы;
нумерации узлов и элементов сначала по всем балкам, а потом – по пилонам и анкерным массивам;
подготовки в текстовом редакторе таблиц исходных данных по готовым «шаблонам» и сохранения их в текстовом файле (например “myfile_5.txt”). Имя файла не более 8 символов латиницей;
запуска программы "Интэл" на решение из командной строки DOS: intel.exe myfile_5.txt > list.txt;
анализа результатов решения; необходимой корректировки файла исходных данных (ИД) в текстовом редакторе и повторного запуска программы "Интэл".
В файле "list.txt" хранится системная информация по этапам решения, а также сообщения об ошибках в ИД. В файле "myfile_5.b_1" содержатся исходные данные, а в "myfile_5.b_2" – результаты решения.
На основе «шаблонов» в формате (*.doc) готовятся исходные данные в файл формата (*.txt). Таблицы ИД показаны в прил. 3.
7.2.3. Основные элементы комбинированной системы
состояние элементов системы «0» илиисходноенаступает после их предварительного напряжения, но перед загружением временной нагрузкой. Исходя из конкретной решаемой задачи в программе применяют нормативные или расчетные нагружения для КС.
1. Балка.Её положение задается координатой левого краяXoи уровнемYo= 0 в глобальной системе координат (гск). Число отдельных балок в системе [1..2]. Чаще это многопролетная неразрезная балка.
Каждая балка условно делится на расчетные участки длиной d, имеющие постоянные изгибнуюEIи продольнуюEAжесткости, погонный собственный весp_balи продольную силуN_bal. (рис. 7.8). По статической схеме балка может бытьпростойилинеразрезнойс продольно-подвижным опиранием в промежуточных узлах.
а б в

Рис. 7.8. Схемы нумерации элементов балок: а – разрезных с узлами интерфейса; б – неразрезных; в – простых
Нумерация расчетных узлов и участков балки ведется без пропусков слева направо. Нумерация – сквозная, если балок несколько.
Для расчетного участка задается noпромежуточных «информационных» точек, для которых находится решение и выдается «распечатка». Их количество не влияет на точность решения. Еслиno= 0, то «распечатка» на участке отсутствует.
Значение noподбирается таким образом, чтобы был удобный шаг приращения по осиX, а положение точек совпадало с расположением подвесок кабеля.
Балка может иметь следующие краевые условия закрепления:
жесткую заделку – возникают опорная реакция и момент;
шарнирную опору – возникает опорная реакция;
свободное опирание – никаких реакций не возникает.
Число промежуточных продольно-подвижных опор не ограничено, а балка при этом не разрезается. Для внеопорных сечений допускается ввод шарниров.
Символьный код узла $_codопределяет типы опирания балки:
‘K’ – шарнирно-неподвижное; ‘L’ – шарнирно-подвижное; ‘M’ – жесткое защемление; ‘F’ – свободный край; ‘*’ – шарнир в сечении; ‘_’ – интерфейс, устраивается в местах изменения жесткости или крепления КЭ.
Для типов опирания ‘K’ или ‘L’ есть дополнительный код k_fix, отвечающий за работу опорных частей балки:
‘Z’ ПП опирание; внешнее горизонтальное усилие воспринимается сечением балки;
‘_’ ПН опирание; внешнее горизонтальное усилие передается на основание.
Применяется, когда кабель или ванта крепится к опорному узлу балки.
Конструктивная нелинейность балки
"Интэл"контролирует продольные нагружения для участков балки и выдает сообщение о недопустимости суммарной продольной силы:N= =Np+Nq.
Типы конструктивной нелинейности элементов балки (nel):
‘+’ элемент может быть только растянутым;
‘–‘ элемент может быть только сжатым;
‘*’ элемент считается без учета продольного сжатия / растяжения.
Нагружение балок
Предусмотрены сочетания нагружений 'load'[1..5]. В каждое сочетание могут входитьmpнагрузок [1..10]. Нагрузками могут быть: сосредоточенная силаF, распределенная нагрузкаq, узловое вертикальное перемещениеU. Различаются узловые и элементные нагружения. Если сосредоточенная сила приложена в узле балки или достаточно близко, то ее следует задавать как узловую, т. е. привязка не координатная, а по номеру узла.
Правило знаков: '+' продольная нагрузка растягивает; '+' погонная нагрузка, '+' сосредоточенная сила и '+' прогиб направлены вниз.
2. Пилоны.Их положение задается координатой точки “0” яруса. Число пилонов в системе [0..2]. Порядок нумерации пилонов – произвольный, но удобнее слева направо. Пилон должен проецироваться на любой узел балки и не может быть вне ее узла.
Пилон имеет i_pilуровней (ярусов) крепления канатных элементов [1..5]. Нумерация их начинается от уровня "1" в сторону конца пилона. Узел в заделке не включается в общую систему узлов. В местах изменения профиля (поперечного сечения) пилона вводятся дополнительные расчетные сечения (фиктивные).
Для каждого участка (яруса) пилона задается его высота (уровень) Y, изгибная жесткостьEI, погонный весp_pilи код подвижности ОЧkz_pil(рис. 7.9); информационные точки не задаются.
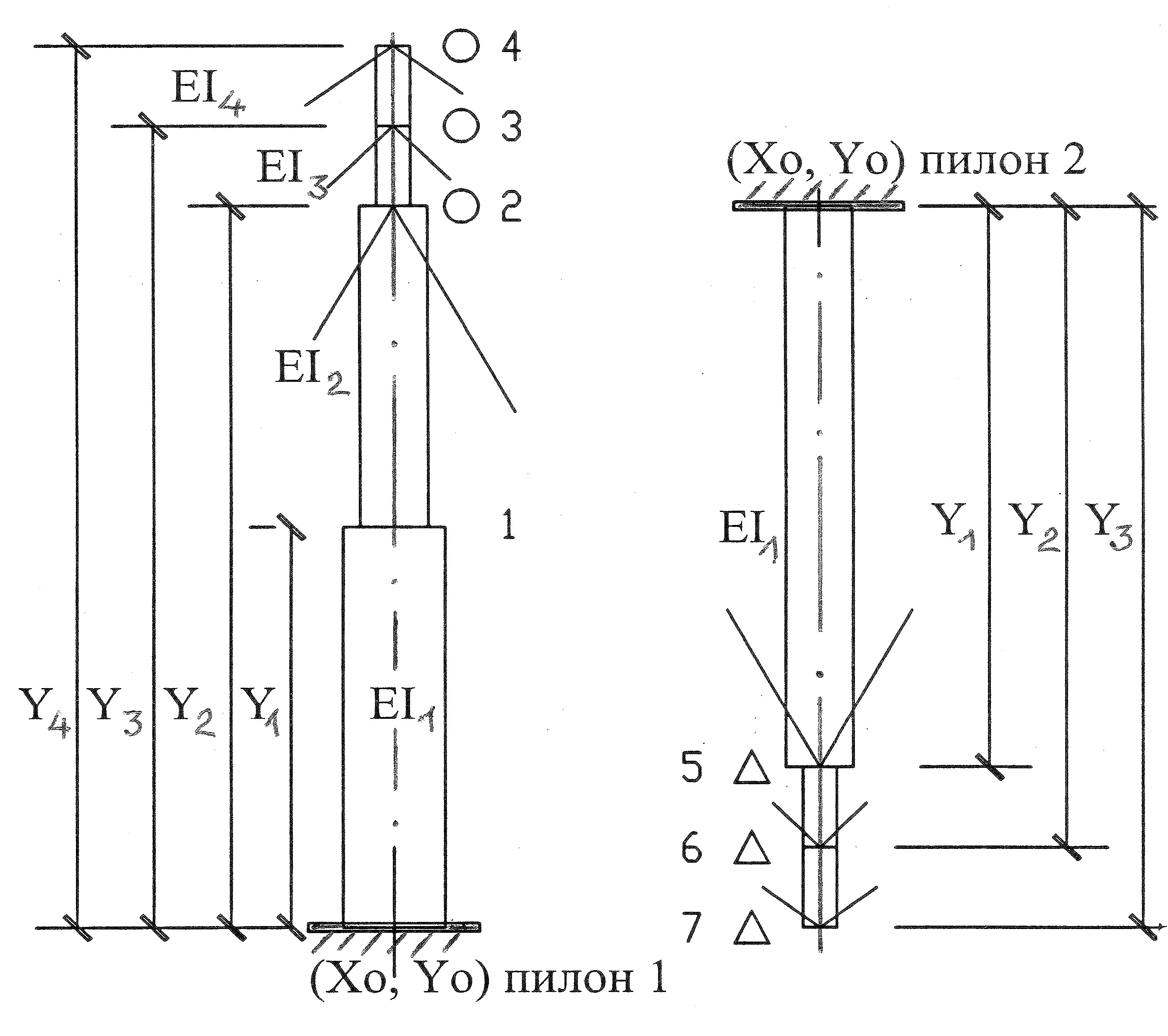
Рис. 7.9. Схемы ярусов пилонов. Расчетные схемы пилона
Пилон может одновременно работать на восприятие кабелей и вант. По статической схеме различаются:
а) защемленная снизу сжатая стойка ("+" высота);
б) защемленная сверху растянутая подвеска ("–" высота).
Для опирания кабелей и сдвоенных вант наличие пилона обязательно. Не допускаются пилоны с «0» высотой; вместо этого применяют крепление к АМ, расположенным в требуемых уровнях.
Дополнительные опции: «отключение» продольного усилия при изгибе пилона; учет его симметрии.
Особенности «0» состояния
Различают следующие типы восприятия узлом пилона горизонтальной нагрузки от кабеля / ванты:
код kz_pil= 0, ПП опирание; не воспринимает никаких горизонтальных нагрузок;
код kz_pil= 1, ПН опирание; воспринимает только временную; пилон «компенсирован», что достигается устройством монтажных тяг и связей;
код kz_pil = 2, ПН опирание; воспринимает монтажную и временную нагрузки; участок изгибается в «0» состоянии, т. е. пилон «не компенсирован».
3. Анкерные массивыпредназначены для восприятия усилий, передаваемых от прямолинейных оттяжек и криволинейных ветвей кабеля. Активные сдвоенные ванты к ним не крепятся.
АМ могут располагаться в любом месте и определяются положением координаты расчетного узла (X, Y).
Крайние в кабельной цепи АМ имитируют устройство абсолютно жестких пилонов с «0» высотой и ПН опиранием.
4. Кабель. Общее число всех кабелей k_sys в модели может достигать 3.Предусмотрена возможность последовательного включения / отключения кабелей в расчетной схеме без удаления записей в ИД.
Общими для всех ветвей кабеля являются: стержневая жесткость EA, погонный собственный вес g_cab и начальный распор h_cab (рис. 7.10). Все остальные параметры и нагружения могут отличаться для каждой ветви.

Рис. 7.10. Схема многоветвевого кабеля
Начало и конец кабеля допускается крепить к следующим элементам:
узлу анкерного массива (распор воспринимается «землей» (рис. 7.13, а);
ПН опорной части пилона (воспринимается сечением изгибаемого пилона, (рис. 7.13, в));
ПН опорному узлу балки (распор передается на основание (рис. 7.13, б));
внеопорному узлу балки (воспринимается сечением балки (рис. 7.15, в)).
Промежуточные узлы кабеля имеют ПП крепление и структурно разделяют кабель на ветви. Если у кабеля ПН опирание, то он разбивается на отдельные ветви, имеющие различные значения распора (рис. 7.15, б).
В общем случае кабель может состоять из нескольких прямолинейных / криволинейных ветвей. Чаще это 1–2–3 ветви. Ветвь длиной Lc соединяется через подвески с балкой и имеет начальный провис fo. Прямолинейные оттяжки могут быть только боковыми (рис. 7.13, а). Исключение составляет кабель из одной ветви: он может быть без оттяжек (рис. 7.13, б, в).
Правило знаков: '+' стрелка кабеляfoпровисает вниз; '+' распор кабеляh_cabрастягивает.
Криволинейная ветвь может иметь краевые участки a, cбез подвесок, которые по конструктивным особенностям ВС крепятся только в средней части ветвиb (d = a + b + c). Поэтому для ненулевых значенийa, cуказывают номера подвешенных участков балки:e1– начало,e2– конец(рис. 7.13, в, 7.15, д). Кроме того, делается обязательное перераспределение веса неподкрепленных участков балки:
на участках, соответствующих a, c p_bal = 0;
на среднем участке добавляется нагружение p_ac = p_bal (a + c) / 2 b.
Иначе балка будет изгибаться в «0» состоянии, что можно проверить, сделав нагружение q (x) = 0.
Нумерация кабелей не зависит от их пространственного положения. Нумерация ветвей в кабеле: слева направо. Число всех ветвей в кабеле ограничено l_cab[1..3].
Прямолинейная (пассивная) оттяжка имеет формальный признак нулевого провиса fo = 0. Под прямолинейной оттяжкой может не быть участка балки(рис. 7.13, а); она может только ПП крепиться к пилону.
Криволинейная (активная) оттяжка (fo ≠ 0) должна проецироваться на связанный с ней через подвески участок (элемент) и не может работать отдельно без балки.
Оттяжка– это ванта, работающая только на растяжение:
передает распор от ВС на АМ или на балку в опорном сечении;
ограничивает горизонтальное перемещение ПП опорных частей на пилоне.
Также можно моделировать гибкую аркув виде пологой сжатой стержневой цепи параболического очертания.
ВС включает несколько расчетных схем i_syst[1..5], соответствующих различным этапам монтажа. Решение находится для кабеля с присвоенным кодомki_cab[1..5] по условию: еслиki_cab<=i_syst, то кабель «работает» на этапе; иначе он «выключен».
Так оперативно контролируется порядок включения / выключения кабелей в работу на монтаже.
Типы продольного профилякабеля: параболический, цепной или произвольной формы, описываемый из внешней программы данных. Наиболее удобно параболическое очертание:km_cab = 0(по умолчанию).
Криволинейный кабель (fo ≠ 0) из одной ветви (без оттяжек) можно подвесить:
между узлов пилонов с ПН ОЧ или между АМ (рис. 7.13, в). При этом пилоны должны иметь достаточную изгибную жесткость;
между узлами балки (безраспорная система, рис. 7.13, б). Таких подкрепленных подвесками / стойками участков на балке может быть несколько.
Особенности устройства многокабельных ВС:
к одной ветви могут быть подвешены несколько участков одной балки, а к одному кабелю – несколько балок;
один участок балки может быть подвешен одновременно к нескольким кабелям; при этом его вес p_bal разделен между ними пропорционально доле b_cab, зависящей от степени отпорности каждого кабеля.
Допускается опирать кабель только на АМ: их удобно применять, так как не требуется описание пилонов. При этом нельзя делать смешанное опирание с применением пилонов. Крайние в цепи АМ всегда имеют ПН крепление, а промежуточные – ПП.
Если для 2-ветвевого кабеля требуется заменить продольно-подвижное опирание среднего узла на неподвижное, то кабель разрезается на 2 ветви с ПН креплением (рис. 7.14, а, б). Аналогично для 3-ветвевых кабелей (рис. 7.15, а, б).
Регулировка усилий в кабелях.Кабель обязан иметь ненулевое предварительное натяжение, которое можно альтернативно задать:
а) формальной величиной распора h_cab, действующего на кабель целиком. При этом не учитываются вес кабеляg_cabиp_cab, удобно применять для решения тестовых задач;
б) погонными нагрузками g_cabиp_cab, действующими на кабель и отдельные ветви соответственно.
«0» состояние многопролетных кабелей
Исходными нагружениями для каждой ветви являются:
g_cab– погонный вес кабеля, неизменяемая величина;
p_cab – погонное усилие натяжения за счет изменения длины подвесок;
p_dec = p_bal * b_cab– воспринимаемая часть веса балки (для многокабельных ВС), гдеb_cab= 0..1 – доля веса балки, выбираемая исходяиз отпорности кабеля и схемы его монтажа (для однокабельных b_cab = 1; для многокабельных их сумма для всех участков балки не должна превышать 1,0).
В общем случае указанные нагружения приводят к различным величинам распора Hpу каждой ветви, что недопустимо. Равенство распоров во всех ветвях является условием правильной работы ВС. При этом отсутствует горизонтальное перемещение промежуточных узлов, а кабель занимает проектное положение.
Для выполнения этого условия программа принудительно назначает новые величины p_tree вместо старых p_cab для всех ветвей. «Эталонная» ветвь, имеющая максимальный пролет, остается без изменений. Таким образом, кабель добавочно нагружается величиной p_add = p_tree – p_cab за счет изменения длины подвесок в пределах всех ветвей, кроме «эталонной».
Понятие «компенсированности» кабеля
Кабель «компенсирован», если в «0» состоянии при соблюдении его проектных параметров (L0, fo) и нагрузок (g_cab, p_cab) в подвешенной балке не возникают прогибы и изгибающие моменты. Однако иногда кабель может быть не «компенсирован» на усилие натяженияp_tree. Программа позволяет это моделировать:
код kd_cab= 0 (по умолчанию). Усилие натяженияp_treeв «0» состоянии не учитывается, так как натяжение подвесок «компенсировано»; достигается устройством временных подмостей и / или уравновешенного навесного монтажа балочной части;
код kd_cab= 1; подвешенная балка изгибается от невоспринятого нагруженияp_tree, т. е. подвески этой ветви не «компенсированы».
«0» состояние безраспорных ВС
Для таких систем характерна передача через наклонные оттяжки распора Hpи вертикальной реакцииRpна балку (рис. 7. 15, д). Для безраспорных систем с внеопорным закреплением кабеля программа различает следующие состояния:
код kr_cab= 0 (по умолчанию). Опорная реакцияRpв “0” состоянии не учитывается, так как реакция «компенсирована»; достигается устройством временных опор, тяг и подкосов, убираемых после монтажа. При этомHpпередается балке в полном объеме, так как «перехват» распора конструктивно очень сложен;
код kr_cab= 1; балка изгибается от неподкрепленной оттяжки, т. е. реакция не «компенсирована».
Учет статического баланса веса подвешиваемых балок(нет связи с кодамиkr_cabиkd_cab):
код kb_cab = 0(по умолчанию) – баланс не выполняется;
код kb_cab = 1 – баланс выполняется в виде дополнительных нагрузок на балку для следующих случаев:
а) при наличии «остатка» веса балки, не учтенного поддерживающими ее кабелями: p_rest = p_bal * [1. - ∑(b_cab)]; актуально только для многокабельных систем;
б) при наличии корректирующего нагружения p_mod = p_dec – p_mid, необходимого для соблюдения баланса; актуально только для нескольких участков балки, поддерживаемых одной ветвью,
где p_mid = [∑(p_dec * d)] / [sum (d)]– усредненное значение по ветви;
p_mod= 0, если на участке ветвиp_dec= const.
Натяжение 2-ярусного висячего моста.Система состоит из верхнего и нижнего кабелей, связанных между собой растянутыми подвесками. Нижний (обратный) кабель всегда имеет более пологий профиль, чем верхний (прямой): fн~ (0,3…0,5) fв.
Размеры всех подвесок и очертание обоих кабелей подобраны так, что после предварительного напряжения они получают параболическое очертание, а усилия в подвесках будут одинаковыми.
Примем условие, что верхний кабель помимо собственного веса gв воспринимает вес нижнего кабеля gн и полный вес балки p_bal. Этапность монтажа поясов:
на 1-м этапе монтируется верхний кабель с подвешенной к нему балкой, что учтено долей b_cab = 1. Кабель принимает начальное положение fвo, показанное пунктиром на рис. 7.11;
на 2-м этапе к верхнему кабелю подвешивается нижний, свободный от веса балки (b_cab = 0); его начальное положение задано fнo;
на 3-м этапе выполняется натяжение обоих кабелей регулировкой длин подвесок с помощью монтажных муфт. Возникает уравновешенная система сил натяжения t, которая приводит к взаимному сближению кабелей в проектное положение fв1 и fн1. Балка жесткости при этом свободна от изгибающих усилий.

Рис. 7.11. Расчетная схема двухъярусного висячего моста
При дальнейшем нагружении расчетной временной нагрузкой q (x)нижний кабель не должен потерять своего натяжения (Htн–Hqн) > 0. Из этого условия находится усилиеtи монтажные перемещения:
fв– провис верхнего кабеля от натяженияtи веса нижнего кабеляgн, где fв1= fвo+fв;fн– выгиб нижнего кабеля от натяженияt; fн1= fнo+fн.
Конструктивная нелинейность кабеля / арки
«Интэл» контролирует нагружение кабелей / арок для заданного критерия и выдает сообщение о недопустимости суммарного распора: H = Hp + Hq.
Корректировка Hqпо итерациям с учетом конструктивной нелинейности не выполняется, так как процесс расходится. В исходных данных применяются критерии контроля и ключевые слова:
‘cab’ – кабель может быть только растянутым, поскольку является гибким канатным элементом; кабель не должен опадать приfo< 0 (перевернутая цепь);
‘arc’ – арка может быть только сжата, так как работает на сжатие (чугун, физическая нелинейность) или является гибкой аркой, теряющей приH< 0 свой профиль; обратная арка (fo> 0) не должна растягиваться;
‘rod’ – элемент может быть как сжатым, так и растянутым; это универсальный стержень.
5. Ванты. Программа реально учитывает ограниченное число сдвоенных вант (6–8 пар на всю систему); максимальноn_van[0..10]. Применение большего количества канатных элементов приводит к численной неустойчивости, и система должна решаться с использованием вантовых сетей. Сдвоенные ванты позволяют моделировать такие системы как «арфа», «веер» и «пучок» (рис. 7.16).
Для каждой пары вант задается их стержневая жесткость EA, объемный вес материалаg_vanи начальное натяжениеSp(рис. 7.12).

![]()
![]()
![]()
Рис. 7.12. Расчетная схема сдвоенных вант
Нумерация сдвоенных вант: от наружного яруса пилона к внутреннему (от консоли к заделке). Сдвоенные ванты не могут соединяться с другими пилонами.
Код ki_van– номер включения ванты в расчетную схему [1..5], управляет его участием в этапе монтажа: еслиki_van<=i_syst, то ванта «работает» на этапе; иначе ванта «выключена».
Тип формыпровиса ванты от собственного веса:
код km_van = 0 – прямая (по умолчанию); не требует задания E, gvan и G;
код km_van = 1 – парабола с провисом fo; требует дополнительного ввода данных:
g_van – объемный вес материала ванты, тс/м3;
E – модуль продольной упругости прямолинейной ванты, тс/м2 (с масштабным коэффициентом);
G – напряжение в ветвях ванты от постоянного и временного нагружений (Sp + p + q); (тс/м2, без масштабного коэффициента).
Учет действия вертикальной реакции ванты на балку в «0» состоянии:
код kr_van = 0, не воспринимается (по умолчанию), т. е. реакция «компенсирована» подмостями;
код kr_van = 1, воспринимается, т. е. реакция не «компенсирована» и балка изгибается.
Учет типа крепления ванта на пилоне:
{код kz_van = 0 – ПП; = 1 – ПН} – без поворота;
{код kz_van = 2 – ПП; = 3 – ПН} – с поворотом опорной части.
Численная сходимостьне наступает, если независимых вант / кабелей (неизвестных) в системе более 12–16. Чем точнее подобраны по приближенным зависимостям осевые жесткостиEAвант / кабелей и изгибныеEIбалок, тем быстрее численная сходимость модели КС.
Регулировка усилий в вантах
Если ванта конструктивно не способна воспринять усилие сжатия (гибкие КЭ), то она выключается из работы с той стороны от пилона, где суммарные прогибы балки меньше. Статическая схема моста меняется, поэтому в вантах создается достаточный запас растяжения за счет предварительного натяжения вант.
Начальное натяжение ванты моделируется «подвешенными» монтажными блоками весомSp1иSp2в узлах крепления каждой ветви к балке без ее изгиба (тс, «+» вниз / «–» вверх, рис. 7.12).
7.2.4. Инструкция по подготовке исходных данных
[ ] – необязательный параметр или таблица;
{…} – допустимые значения;
(k…) – корень данного: если k = 0, то фактическое данное w = w_tab;
если k ≠ 0, то w = k * w_tab.
Можно использовать выборочную симметрию для балок, пилонов, анкерных массивов и кабелей, что сокращает объем исходных данных.
Вводятся следующие нумерованные таблицы, разделенные пустыми строками.
1.Описание системных констант и параметров; обязательная таблица в виде одной строки данных.
[k_ord] i_syst ±x_sym ei_b ei_p ea_k ea_v [±grad alfa]
где общие для системы параметры:
k_ord – порядок масштаба линейных размеров + {0..3}; применяется для больших растянутых балок (d ≥ 100 м) для исключения численного переполнения:
если k_ord = 1..3, m = 10 … 1000 (dx / m, dy / m);
если k_ord = 0, m = 1 (без изменений линейных размеров);
i_syst – номер расчетной схемы (РС), соответствующей этапу монтажа {1..5};
x_sym – координата оси симметрии для узлов / элементов, м;
ei_b, ei_p – коэффициенты для жесткостей балок и пилонов;
ea_k, ea_v – коэффициенты для жесткостей кабелей и вант;
grad – температура нагрева «+» или охлаждения «–», С, действует на все сочетания нагружений;
alfa – коэффициент линейного температурного расширения, м/град.
2.Описание балок с учетом их симметрии; обязательная таблица.
В таблицу входят блоки данных по числу балок, разделенные пустой строкой (признак окончания). Каждый блок состоит из заглавной записи и строк описания участков (элементов).
bal n s $1 [z] Xo ei [± p_bal] [± h_bal] !начало блока
1 $2 [z] [nel] d (k_ei) (k_p) (k_h) [no] ! уч-к 1
2 $2 [z] [nel] d (k_ei) (k_p) (k_h) [no] ! уч-к 2
Здесь в начальной строке параметры балки: n – ее номер; s – признак ее симметрии; $1 – код 1-го узла; Xo – координата левого края балки, м; ei – приведенная изгибная жесткость, тс/м2(фактическая жесткость балки EI = ei * ei_b); p_bal – погонный вес балки, тс/м; h_bal – продольная сила, тс;z– код продольного нагружения 1-го узла.
На каждом участке задается: i – его порядковый номер; $2 – код 2-го узла; nel – код нелинейности; d – длина, м; k_ei – корень для ei; k_ p – корень для p_bal; k_h – корень для h_bal; no – число информационных точек.
s– символьный признак симметрии балки: ‘_’, 0 – нет; L – балка на оси; S – балка вне оси; A – узел на оси симметрии.
$ – символьный код опирания балки: K – шарнирно-неподвижное; L – шарнирно-подвижное; M – жесткое защемление; F – свободный край; * – шарнир в сечении; ‘_’ – интерфейс (в местах изменения жесткости и крепления КЭ).
z – код восприятия узлом продольного нагружения: Z – да; ‘_’ – нет.
nel – код конструктивной: ‘_’ без учета нелинейности; ‘+’ допускается растяжение; ‘–‘ допускается сжатие; ‘*’ не учитывается продольная сила.
[ 3 ]Описание пилонов с учетом симметрии. В таблицу входит n блоков (для каждого пилона), разделенных пустой строкой. Каждый блок состоит из заглавной записи и строк описания ярусов.
pil n s [no] ±Yo ei [p_pil] ±Xo ! начало
1 z Y (k_ei) (k_p) [U] ! ярус 1
3 z Y (k_ei) (k_p) [U] ! ярус 3
Здесь в начальной строке параметры пилона: n – его номер; s – признак его симметрии; Xo, Yo – координата узла в заделке; ei – приведенная изгибная жесткость, тсм2(фактическая EI = ei * ei_p); p_pil – погонный собственный вес, тс/м.
На каждом ярусе задается: i – его порядковый номер; z – код крепления kz_pil; Y – высота (уровень), м; k_ei – корень для ei; k_ p – корень для p_pil;
no – число ИТ – не задается; U – данное не используется.
s– символьный признак симметрии пилона:
‘_’, N – симметрия не учитывается; S – пилон вне оси; A – пилон на оси симметрии.
[ 4 ]Описание АМ. Определяется координатой узла условного центра АМ.
i s ±X ±Y ! АМ № 1
i s ±X ±Y ! АМ № 2
s– символьный признак симметрии АМ: ‘_’, N – нет; S – узел вне оси; A – узел на оси (не сдвоенный); i – нумерация узлов АМ по порядку ввода в таблицу.
[ 5 ]Описание системы кабелей с учетом их симметрии. В таблицу вводят блоки данных для кабелей. Блоки состоят из заглавной записи и строк, описывающих каждую ветвь кабеля. Между собой блоки разделяются пустой строкой.
xxx n s n1 it [km kb kd kr ki] ea g_cab [h_cab] !нач блока
1 n2 # ±fo [e1] [e2] [±p_cab] [b_cab] [no] !вет1
2 n3 # ±fo [e1] [e2] [±p_cab] [b_cab] [no] !вет2
Здесь в начальной строке параметры кабеля: n – его номер; s– признак его симметрии; n1 – номер 1-го узла; it – «ключ итераций» начального значения распора {+ –0.. 9}; коды km, kb, kd, ki; ea – приведенная продольная жесткость, тс (фактическая EA = ei * ea_k); g_cab – погонный собственный вес, тс/м; h_cab – сосредоточенный распор, тс; ki – номер включения кабеля в расчетную систему [0..5].
km – код формыкабеля [0, 1]; kb – кодбалансавесов [0, 1]; kd – код начального состояния балки [0, 1]; kr – код учета вертикальнойреакцииоттяжек [0, 1].
Для каждой ветви задается: i – ее порядковый номер; n2 – номер 2-го узла; fo– стрела провиса, м («+» ветвь провисает; «–» ветвь опадает); e1 – левый элемент, e2 – правый элемент подвешенного участка балки; p_cab – усилие натяжения подвесками, тс/м («+» вниз, «–» вверх); b_cab – доля воспринятого веса балки {0..1}; no – число ИТ.
s– символьный признак симметрии кабеля:
‘_’, N – нет; S – ветви кабеля вне оси; L – ветвь на оси симметрии (без разрыва).
Топология ветви определяется первым n1 и вторым n2 узлами крепления к балке, пилону или АМ. Символьный код [#] для узлов кабеля здесь не используется.
xxx– ключевое слово для типа исполнения: кабель, арка, стержень {cab, arc, rod}.
Если введено h_cab ≠ 0, то g_cab, p_cab и b_cab игнорируются программой.
[ 7 ]Описание системы сдвоенных вант. В таблицу вводят блоки данных для вант вокруг пилона, разделенные пустой строкой.
pil n Av ± Sp [g] [Eo] начало
1 n1 n2 n3 [km kz ki kr] (k_a) (k_1) (k_2) [z_1] [z_2] it !в1
2 n1 n2 n3 [km kz ki kr] (k_a) (k_1) (k_2) [z_1] [z_2] it !в2
Здесь в начальной строке параметры вант: n – номер несущего его пилона; Av – площадь сечения, м2; Sp – начальное усилие натяжения, тс («+» вниз; «–» вверх); g – объемный вес материала ванты, тс/м3; Eo – модуль упругости прямолинейной ванты, тс/м2(с масштабным коэффициентом). EA = Av * ea_v – фактическая продольная жесткость, тс.
Для каждой ванты задается: i – ее порядковый номер; n1, n2, n3 – узлы крепления к балке и пилону; коды km, kz, ki, kr; k_a – корень для Av; k_1 – корень Sp для ветви 1 и k_2 – для ветви 2; z_1 – напряжение G (Sp + p + q)для ветви 1; z_2 – для ветви 2 (тс/м2, без учета масштабного коэффициента).
it – «ключ итераций» определяет начальные усилия в вантах {+ – 0 .. 9}.
km – код формыванты [0, 1]; kz – кодкрепленияна пилоне [0, 1, 2, 3];
kr – код вертикальной реакции ванты [0, 1]; ki – номер включения в РС [0..5].
8.Нагружения – обязательная таблица. Состоит из «load» блоков, описывающих сочетания нагружений {1..5}. Каждое сочетание состоит из mp нагрузок {1..10}:
nag j ! сочетание j
1 d N k ± W a b ! нагрузка 1
2 d N k ± W a b ! нагрузка 2
Для каждой нагрузки задаются:
i – ее номер в блоке сочетания; N – номер балки или узла;
d – символьный тип объекта нагрузки: 'b' – элемент балки; 'n' – узел балки;
k – символьный код элементной {q, F} и узловой нагрузки {F, U, H};
W – величина нагрузки или перемещения («+» вниз; «–» вверх);
x – привязка сосредоточенной силы F(x), м; {0..L} гск;
a – привязка начала q(x), м; [0..L} a < b гск;
b – привязка конца q(x), м; [0..L} гск.
Узловая нагрузка на балку:
F_nod – вертикальная сила, тс; +–[0..} + вниз;
H_nod – горизонтальная сила, тс; +–[0..} + вправо;
U_nod – вертикальное перемещение, м; +–[0..} + вниз.
«END»признак окончания
Некоторые из перечисленных таблиц могут отсутствовать, но порядок их следования не должен меняться.
При последовательном вводе таблиц ИД «балка – пилон – АМ» формируется описание топологии узлов модели, поэтому нумерация расчетных узлов сквозная, а их общее число ограничено (см. n_elem в прил. 2). При вводе таблиц «кабелей» и «сдвоенных вант» задается привязка к этим узлам.
В исходных данных необходимо соблюдать правила:
нули записываются в виде «0»; все управляющие символы – в «латинице»;
целое число записывается без дробной точки, а на отведенном ему поле прижато вправо;
вещественное число записывается с дробной точкой и может свободно помещаться в отведенном поле.
В программе для ИД допустима любая совместимая система единиц. Но решение численно устойчивее, если применяются геометрические размеры в метрах, нагружения – в тонно-силах, а модули упругости – в тонно-силах на метр квадратный.