

3.4 Вопросы для самоконтроля
В чем заключается метод решения задач о равновесии системы нескольких твердых тел? Как определить число независимых уравнений равновесия для системы тел?
Как в уравнения равновесия включить распределенную нагрузку?
Как формулируются векторное и аналитическое условия равновесия системы параллельных сил на плоскости?
Лекция №4
4.1 Момент силы относительно оси
М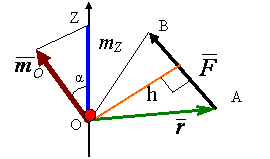
![]() оментом
mZ
силы
оментом
mZ
силы
относительно оси Z называется проекция момента этой силы относительно центра О, лежащего на этой оси, на эту ось.
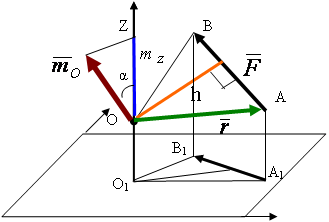
Момент mZ может быть определен с помощью правила Жуковского. Необходимо:
с
 проецировать
силу
проецировать
силу
на плоскость перпендикулярную оси Z;
определить момент этой проекции относительно точки O1 пересечения плоскости и оси Z.
Момент
силы относительно оси Z
равен
нулю,
если сила и ось лежат в одной плоскости,
так как в этом случае проекция силы
на
плоскость перпендикулярную оси Z
пресечет эту ось (в частном случае равна
нулю), ее плечо равно нулю. То есть,
 ,
если
вектор
параллелен или пересекает ось Z.
,
если
вектор
параллелен или пересекает ось Z.
4.2 Пространственная система сил
В векторной форме условие равновесия произвольной пространственной системы сил имеет вид:
.


Уравнения равновесия произвольной пространственной системы сил в аналитической форме имеют вид:


Для нахождения моментов сил относительно координатных осей могут быть использованы правило Жуковского и теорема Вариньона: Момент равнодействующей относительно оси равен сумме моментов составляющих сил.
Для этого силы, действующие на тело, раскладывают на составляющие параллельные осям координат и находят их моменты относительно всех осей координат.
Если на тело действует пространственная сходящаяся система сил, то аналитические условия равновесия имеют вид:
![]()
Если на тело действует пространственная систем параллельных сил, то одну из осей координат (например, ось Z) располагают параллельно силам. Тогда аналитические условия равновесия примут вид:

Если на тело действует пространственная система пар, то аналитические условия равновесия примут вид:
Аналитические условия равновесия различных систем сил
Ниже представлена справочная таблица, позволяющая найти общий вид уравнений равновесия для любой системы сил
СИСТЕМА СИЛ |
||
пространственная |
плоская |
|
произвольная |
||
|
1) 2) 3) |
|
параллельные |
||
|
1) 2) |
|
сходящаяся |
||
|
|
|
система пар |
||
|
|
|
4.4 Вопросы для самоконтроля
Что называется моментом силы относительно данной оси? Как определяется этот момент?
В каких случаях момент силы относительно данной оси равен нулю?
Какая существует зависимость между вектором-моментом силы относительно данной точки и моментом той же силы относительно оси, проходящей через эту точку?
Как с помощью теоремы Вариньона находят момент силы относительно декартовых осей координат?
Как формулируются условия равновесия пространственной произвольной системы сил в векторной и аналитической формах?
Лекция №5