

3.1 Параллельные силы
С истема
сил
истема
сил
, линии действия которых параллельны друг другу и лежат в одной плоскости, называется плоской системой параллельных сил.
Пусть все силы лежат в плоскости О1XY.
При приведении этой системы сил к произвольному центру (точке) О получим главный вектор , приложенный в точке О, и пару сил с моментом .
Главный вектор системы параллельных сил параллелен силам:
![]()
Момент пары сил равен главному моменту параллельных сил относительно центра приведения О и параллелен оси O1Z.
 .
.
Условия равновесия для плоской системы параллельных сил в векторной форме имеют вид:
.
Расположим
ось О1Y
параллельно
силам
,
тогда вектор
перпендикулярен
плоскости О1XY
и его можно считать величиной алгебраической

Отсюда следуют две формы аналитических условий равновесия для системы параллельных сил на плоскости.
Основная форма условий равновесия.

Для равновесия плоской системы параллельных сил необходимо и достаточно, чтобы сумма проекций всех сил на ось О1Y, параллельную им, и сумма их моментов относительно любой точки О, лежащей в плоскости действия сил О1XY, были равны нулю.
Вторая форма условий равновесия:
Для равновесия плоской системы параллельных сил необходимо и достаточно, чтобы суммы моментов всех сил относительно любых двух точек А и В (причем прямая АВ не параллельна силам), были равны нулю.
Д ля
плоской системы параллельных сил каждая
форма содержит два
уравнения равновесия.
ля
плоской системы параллельных сил каждая
форма содержит два
уравнения равновесия.
3.2 Распределенные нагрузки
При расчетах встречается нагрузки распределенные по плоскости или по прямой по определенному закону.
Простейшим примером распределенных сил, лежащих в одной плоскости является равномерно распределенная вдоль прямой нагрузка. Это система параллельных сил, которая характеризуется постоянной интенсивностью q значением силы, приходящейся на единицу длины нагруженного участка АВ длиной а. Размерность распределенной нагрузки [q] = H/м.
При
статических расчетах эту систему
параллельных сил заменяют равнодействующей
 ,
приложенной в середине отрезка АВ, ее
модуль равен Q
= qa.
,
приложенной в середине отрезка АВ, ее
модуль равен Q
= qa.
Неравномерно распределенная нагрузка.
П араллельные
силы увеличиваются от нуля до qmax
по
линейному закону. Равнодействующая
араллельные
силы увеличиваются от нуля до qmax
по
линейному закону. Равнодействующая
таких сил по модулю равна площади треугольника АВС, Q = 0,5qmaxa.
Линия действия равнодействующей силы проходит через центр тяжести треугольника, т. е. на расстоянии a/3 от точки В.
3.3 Равновесие системы тел
Статический расчет системы тел сводится к рассмотрению условий равновесия конструкций, состоящих из не жестко соединенных между собой тел. Связи между частями конструкции называются внутренними, скрепляющие конструкцию с другими телами, внешними.
Системы тел, для которых число неизвестных реакций связей равно числу уравнений равновесия, называются статически определимыми. Если число неизвестных реакций связей больше числа уравнений равновесия (на одно, два и т.д.), то системы тел называются статически неопределимыми (соответственно один, два и т.д. раза). Такие задачи невозможно решить методами статики.
При решении задач на равновесие системы тел обычно конструкцию расчленяют на отдельные тела и составляют уравнения равновесия для каждого из тел в отдельности. При этом проверяют, не превышает ли число неизвестных реакций связей число уравнений равновесия, которые можно составить для данной конструкции
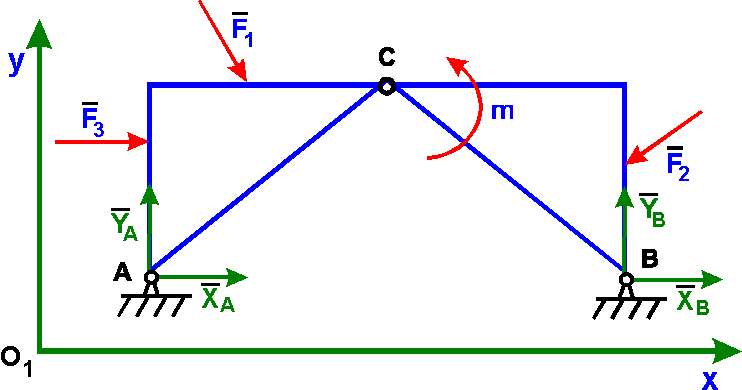
Пример.
Для определения внутренних и внешних
реакций связей трех шарнирной арки
расчленим
конструкцию по соединительному шарниру
С
на две части и рассмотрим равновесие
каждой из частей в отдельности. Внешние
реакции шарниров А
и В
разложим
на составляющие
 .
Реакцию со стороны части СВ
на АВ
разложим на составляющие
.
Реакцию со стороны части СВ
на АВ
разложим на составляющие
 ,
а реакцию со стороны АС на ВС на
составляющие
,
а реакцию со стороны АС на ВС на
составляющие
 .
Так как по третьему закону Ньютона
(аксиома 4, §1)
.
Так как по третьему закону Ньютона
(аксиома 4, §1)
 ,
то неизвестных реакций связей в уравнения
равновесия войдет шесть.
,
то неизвестных реакций связей в уравнения
равновесия войдет шесть.
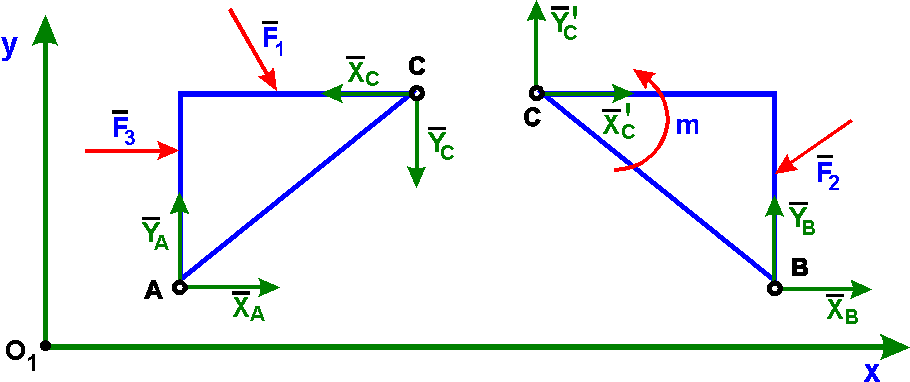
При действии на трех шарнирную арку заданной произвольной плоской системы сил для каждой части можно записать по три уравнения равновесия:
для АС для СВ
Следовательно, система тел, образующих арку, статически определима.
Для проверки решения задачи считают всю конструкцию отвердевшей (принцип отвердевания, аксиома 5, §1) и составляют одно - два уравнения равновесия для конструкции в целом или строят в масштабе многоугольник внешних активных сил и реакций связей, действующих на конструкцию. Если проверочные уравнения равновесия обращаются в тождества, а многоугольник сил замкнут, то задача решена верно.