

Продолжение таблицы а.52
Bbha |
|
ihab=zbzg /zfza |
ibah=1– ihab |
b=0; a=(1+ zbzg /zfza)h g–h =f-h = –(zb /zf)h
|
|||
Cbeh |
|
ihab=– (zb /za) |
ibhe=1/(1– iheb) |
b=0; h=zgze /(zgze–zbzf)e g–h =f –h =– (zb /zf)h
|
|||
(3k)bea |
|
ihab=zbzg /zfza iheb=zbzf /zgze |
ibae= (1–ihab)/(1–iheb) |
b=0; a= ibae e h =a /(1- ihab) g–h =f-h = – (zb /zg)h
|
|||
Примечание. Для передачи (3k)bea с одновенцовым сателлитом справедливы формулы при zf =zg. |
|||||||
Условное обозначеие варианта |
Схема
|
Передаточное отношение
|
Угловая скорость
|
||||
основного звена |
сателлита |
||||||
Ab1h1a1Ab2h2a2 |
|
ia2h1= ib2a2h2ib1a1h1= (1+р2)(1+р1)
|
b1=b2=0 a2= (1+р2)(1+р1) h1 a1= h2= (1+р1) h1 |
g1–h1=2p1h1/(1–р1) g2–h2=2p2h2/(1–р2)
|
|||
Ab1h1a1Ah2b2a2 |
|
ia2h1= ih2a2b2ib1a1h1= –р2(1+р1)
|
b1=h2=0 a2= –р2(1+р1)h1 a1=b2= (1+р1)h1 |
g1–h1=2p1h1/(1–р1) g2–h2=2p2b2/(1–р2)
|
|||




Продолжение таблицы а.52
(AA)h1(b1h2) a2 |
|
i= р2(1+р1)+1
|
h1=0; b1=h2 a2=[р2(1+р1)+1]b1 b2=a1=-р1b1 |
g1-h1=2p1b1/( р1-1) g2h2= -2p2(р1+1)h2/(р2-1)
|
(AA)h1(b1b2) a2 |
|
i= 1-(р1+1)(р2+1) |
h1=0; b1=b2 a2= [1-(р1+1)(р2+1)]b1 a1=h2=-р1b1
|
g1–h1= 2p1b1/( р1–1) g2–h2= –2p2(р1+1)h2/р1(р2–1)
|

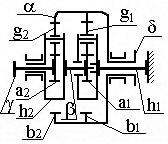
Таблица А.53 – Формулы для определения КПД () планетарных передач
Таблица для определения КПД () передач А, В, С, 3k (с подшипниками качения) |
||||
Обозначение варианта |
Величина |
h |
||
Передача составлена из одного механизма |
||||
Abha |
bah=bha =1–ph /(p+1) |
h =h3a+h3b +hп |
||
Aahb |
abh=ahb =1–h /(p+1) |
|||
Ahba |
hab=hba =1– h |
|||
Bbha |
bah=bha =1– ihabh /( ihab –1) |
|||
Cbeh |
bhe=1/(1+ 1– ibheh) |
h =h3b+h3e +hп |
||
(3k)bea |
bae 0,98 /{1+[ibae/(1+zb/za) –1]heb} |
h eb=h3b+h3e |
||
Передача составлена из 2-х механизмов А |
||||
Обозначение варианта |
Величина |
|||
|
a2h1=b2a2h2a1h1=[1–p2h2/(p2+1)][1–p1h1/(p1+1)] |
|||
Ab1h1a1Ah2b2a2
|
a2h1=b2a2h2h1a1b1=(1–h2)[1–p1h1/(p1+1)] |
|||
(AA)h1(b1h2)a2 |
a2(b1h2)=1–{[1– 1/(p1p2+p2+1)] h2 + p1p2h1/(p1p2+p2+1)} |
|||
(AA)h1(b1b2)a2 |
a2(b1b2)=1–{[1+ p1/(p1p2+p2+1)] h2 – [p1(p2+1)]h1/(p1p2+p2+1)} |
|||
 Ab1h1a1Ab2h2a2
Ab1h1a1Ab2h2a2
Таблица А.54– Соотношение между моментами, действующими на основные звенья
планетарных передач
Условное обозначение |
Соотношение моментов |
|
Передача составлена из одного механизма |
||
А |
Ta=–Th/(p+1); Tb= –Thp/(p+1) |
|
В |
Ta= –Thzazf/( zazf + zbzg) ; Tb= –Thzbzg/( zazf + zbzg) |
|
C |
Tb= –Te zbzf/(zezg); Th= –Te[( zezh–zbzf)/( zezg)]/ bhe при Ph>0 Th= –Te[( zezh–zbzf)/( zezg)]beh при Ph<0 |
|
3k |
Ta= –Te[za/( za+ zb)][1– (zbzf /zgze)]/bae при Pa>0 Ta= –Te[za/( za+ zb)][1– (zbzf / zgze)]bae при Pa<0 Tb=-Te[zb/( za+ zb)][1+(zazf / zgze)] |
|
Передача составлена из 2-х механизмов А |
||
Условное обозначение |
Соотношение моментов |
|
Для ведущего звена |
Для промежуточного звена |
|
Ab1h1a1Ab2h2a2 |
Ta2= –Th1/[(p2+1)(p1+1)] |
Ta1= –Th2= –Th1/(p1+1); Tb1= –Th1p1/(p1+1); Tb2= –Th1p2/[(p2+1)(p1+1)] |
|
Ta2= –Th1/[p2(p1+1)] |
Ta1= –Tb2= –Th1/(p1+1); Tb1= –Th1p1/(p1+1); Th2= –Th1(p2+1) /[ p2(p1+1)] |
(AA) h1(b1h1) a2 |
T= Ta2= –T/[p2(p1+1)+1] |
T=Tb2 – Ta1= - Tp2 / [p2 (p1+1)+1]; T=Th2= T(p2+1) / [p2 (p1+1)+1]; Tb1= T p1p2 / [p2 (p1+1)+1]; Th1= – Tp2 (p1+1)/ [p2 (p1+1)+1] |
(AA) h1(b1b2) a2 |
T= Ta2=T/[(p1+1)( p2+1)-1] |
T=Tb2= - Tp2 /[(p1+1)( p2+1) –1]; T=Th2= –Ta1=T(p2+1)/[(p1+1)( p2+1) –1]; Tb1= T p1(p2+1) / [(p1+1)( p2+1) –1]; Th1= – T(p1+1)( p2+1)/ [(p1+1)( p2+1) –1] |
 Ab1h1a1Ah2b2a2
Ab1h1a1Ah2b2a2
Таблица А.55 – Коэффициент ширины колеса относительно диаметра (bd)i
механизмов А, В, 3k планетарных передач
Тип механизма |
(bd)i |
Примечание |
А |
(bd)а= bw /(dw)а=р(bd)b 0,75 при р3; (bd)g= bw /(dw)g =2p(bd)b /(p-1) при р3 |
(bd)b = bw /(dw)b 0,12…0,188 |
В |
(bd)а= bw /(dw)а 0,75; (bd)f = bw /(dw)f 0,75 |
(bd)а при nw=3 (bd)b= bw /(dw)b 012…018 |
3k |
(bd)f = bw /(dw)f =0,30…0,35 |
Для схемы с zbze величина (bd)g= bw /(dw)g определяется при расчете на прочность зубьев |
Таблица А.56– Коэффициент диаметра колеса относительно модуля bm
планетарных передач
Конструкция |
bm =bw/m, не более |
Высоконагруженные точные передачи, валы, опоры корпуса повышенной жесткости при: НВ350 НВ350 |
45…30 30…20 |
Обычные передачи редукторного типа в отдельном корпусе с достаточно жесткими валами и опорами (и другие аналогичные) при: НВ350 НВ350 |
30…25 20…15 |
Грубые передачи (крановые и др.) или с плохо обработанными колесами (литье), а также открытые передачи, передачи с консольными валами (конические), подвижные колеса коробок скоростей |
15…10 |
Примечание. Нижние значения bm – для повторно- кратковременных режимов работы, значительных перегрузок и средних скоростей; верхние значения bm - для длительных режимов работы, небольших перегрузок и высоких скоростей. |
|
Таблица А.57– Условие соосности планетарных передач
Обозначение механизма |
При равенстве углов зацепления в полюсах а–g и b–g или a–g и b–f или a–f; b–g и e–f |
При неравенстве углов зацепления в полюсах а–g и b–g или a-g и b–f или a–f; b–g и e–f |
A |
za+2zg=zb |
(za+zg )/cos (tw)a =(zb – zg)/ cos (tw)b |
B |
za+zg=zb – zf |
(za+zg )/cos (tw)a =(zb – zf)/ cos (tw)b |
C |
zb–zf=ze – zg |
(zb – zf)/ cos (tw)b ==(ze – zg)/ cos (tw)e |
3k |
za+2zg=zb; zb–zg=ze – zf |
(za+zg )/cos (tw)a=(zb – zg)/cos (tw)b = (ze – zg)/cos(tw)e |
Примечание. В таблице приведены формулы для передач с прямозубыми колесами и с равными модулями во всех полюсах зацепления |
||

Таблица А.59 – Коэффициент Y, учитывающего угол наклона зуба колес
планетарной передачи
|
0 |
10 |
20 |
30 |
40 |
42 |
Y |
1 |
0,93 |
0,86 |
0,78 |
0,72 |
0,7 |
Таблица А.60 – Кинематические схемы наиболее распространенных волновых передач
и их основные параметры
№ схемы |
Кинематическая схема передачи |
Передаточное отношение и его рациональные пределы |
КПД и его ориентировочные предельные значения |
1 |
|
i(b)hg=70…300; i(b)hg=–zg/(zb-zg); (zb–zg)=knw |
(b)hg=0,91…0,71; (b)hg=(1–(h)bg)/(1+ i(b)hg(h)bg); (h)bg =0,00137 |
2 |
|
i(g)hb=70…300; i(g)hb=–zb/(zb–zg); (zb–zg)=knw |
(g)hb=0,91…0,71; (g)hb=1/[1–(h)bg(1–i(g)hb)]; (h)bg0,00137 |
2а |
|
||
3 |
|
i(f)hb=300…6000; i(f)hb=–zbzg/(zbzg-zgzf); (zb–zg)= (zf–zg)=knw |
(f)hb=0,55…0,07; (f)hb=1/[1+(h)bf (i(f)hb–1)]; (h)bf=0,00274 |
Примечание. Обозначение: h – генератор волн; b – подвижное жесткое колесо; g – гибкое колесо; f – неподвижное жесткое колесо. В приведенных формулах верхний индекс, стоящий в скобках при i, , обозначает неподвижное звено. Первый нижний индекс обозначает ведущее звено, второй – ведомое; |
|||




Таблица А.61 – Материалы и прочностные характеристики основных деталей