

высшая математика
.pdf Лекция 6
Лекция 6
Векторы
Дается понятие вектора, рассмотрены линейные операции над векторами, скалярное произведение векторов.
10. Дадим вначале геометрическое толкование вектора, используя понятие направленного отрезка, данное в лекции 2. Напомним, что направленным отрезком называют отрезок определенной длины и определенного направления. Направленный отрезок с фиксированным началом
А и концом В называется связанным вектором и обозначается AB . Если для направленного отрезка фиксируются только его длина и направле-
|
|
|
|
! |
! |
! |
||
ние, то он называется свободным вектором (обозначение a , |
b , |
x ...). |
||||||
Длиной связанного вектора AB (модулем, нормой) называется рас- |
||||||||
стояние между точками А, В и обозначается |
|
AB |
|
; запись |
! |
также озна- |
||
|
|
|||||||
|
|
a |
||||||
чает длину (связанного или свободного) вектора |
! |
|
|
|
|
|||
a , которую находят как |
||||||||
длину соответствующего направленного отрезка.
Вектор, начало и конец которого совпадают, называется нулевым и обо-
! |
(он имеет произвольное направление и для него |
! |
= 0 ). |
||||
значается 0 |
0 |
||||||
|
|
|
! |
! |
|
|
|
|
|
|
|
|
|
||
Говорят, что два ненулевых вектора a |
, b есть коллинеарные, если |
||||||
|
|
|
|
! |
! |
|
|
они параллельны одной и той же прямой; два вектора a |
, b называются |
||||||
! |
! |
|
|
|
|
|
|
равными (a |
= b), если они одинаково направлены и имеют равные модули. |
||||||
Углом между векторами |
! |
! |
|
|
|
|
|
a |
и b будем называть наименьший угол |
||||||
|
|
|
! |
|
|
|
|
ϕ , на который нужно повернуть вектор a , чтобы его направление совпа- |
|||||||
дало с направлением вектора |
! |
|
|
|
|
|
|
b , при условии, что оба вектора отнесены |
|||||||
к общему началу (рис. 1).
Рис. 1
3 1
|
|
|
|
|
|
|
! ! |
|
В этом случае вводится обозначение ϕ = |
|
|
. Очевидно, что |
|||||
|
a,b |
|||||||
|
|
! ! |
|
π |
|
|
|
|
0 ≤ ϕ ≤ π . Если |
|
a,b |
= |
, то векторы называются ортогональными |
||||
|
|
|
|
2 |
|
|
|
|
! |
|
|
|
|
|
|
|
|
(считаем, что 0 |
ортогонален любому вектору). |
|
|
|
||||
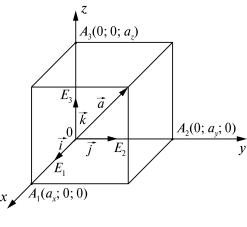
По аналогии с лекцией 2 рассмотрим декартову прямоугольную систему координат в пространстве. Для ее построения выберем точку О (начало системы координат) и проведем через эту точку взаимно перпендикулярные оси: Ox (ось абсцисс), Oy (ось ординат), Oz (ось апликат). На каждой оси отложим отрезки OE1, OE2, OE3 единичной длины. Полученные единичные отрезки рассмотрим как направленные, причем их направ-
ления совпадают соответственно с направлением осей Ox, Oy, Oz. Обозна- |
||||||||||||||||||
! |
|
|
|
! |
|
|
|
! |
|
|
|
|
|
|
! |
|
|
|
чим i = |
OE |
1 |
, |
j = |
OE |
2 |
, |
k = |
OE |
3 |
|
и назовем их ортами. Вектор i считаем |
||||||
первым, |
! |
|
|
|
|
! |
|
|
|
|
|
|
|
|
|
|||
j |
– |
вторым, |
k |
– третьим вектором, и условимся, что тройка |
||||||||||||||
|
! |
! |
! |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
векторов (i , |
j, |
k) имеет правую ориентацию. |
|
|
|
|
||||||||||||
Таким образом, в пространстве R3 построена декартова прямо- |
||||||||||||||||||
угольная система координат, которую обозначим Oxyz (рис. 2). |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
! |
|
|
! |
! |
в рассматриваемой системе коор- |
||||
Очевидно, что орты i , |
|
|
j |
, k |
||||||||||||||
динат |
имеют |
|
координаты: |
i! = col (1; 0; 0) , |
!j = col |
(0; 1; 0) , |
||||||||||||
! |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k = col (0; 0; 1) . |
|
|
|
|
|
! |
|
|
|
! |
! |
! |
||||||
Произвольный вектор |
a |
|
можно разложить по ортам i |
, |
j , |
k |
||||||||||||
(рис. 2):
Рис. 2
3 2
! |
= ax |
! |
+ |
! |
+ |
! |
a |
j |
ay j |
az k , |
|||
при этом координаты вектора |
|
! |
есть проекции этого вектора на оси |
|||
|
a |
|||||
координат. Имеет место и обратное: для данной тройки действительных
чисел a , a |
, a |
z |
можно построить единственный вектор пространства R3 |
||
x y |
|
|
сначала строят соответствующие геометрические про- |
||
(для чисел a , a , a |
|||||
|
x |
|
y z |
|
! |
екции, а затем сам вектор |
a – как диагональ параллелепипеда). Таким |
||||
образом, с помощью декартовой системы координат Oxyz можно задать взаимно однозначное соответствие множества векторов пространства R3 и множества упорядоченных троек чисел.
Аналогично, в общем случае упорядоченную совокупность
|
|
|
|
|
|
|
|
a1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
col |
(a ;a |
2 |
;...; a |
) |
= |
|
a2 |
|
n вещественных чисел называют n-мерным век- |
|||||||||||||||||||||||||
|
1 |
|
|
n |
|
|
|
" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
an |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
! |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
! |
|
|
|
|
|
|
|
|
|
|
|
а числа |
ai , |
i = |
|
1, n |
|
– координатами вектора |
|
|||||||||||||||||
тором (обозначение a ), |
|
|
a . |
|||||||||||||||||||||||||||||||
|
Правило |
|
сложения |
двух векторов: |
! |
|
col (a1 |
;a2 ;...; an ) |
|
и |
||||||||||||||||||||||||
|
|
a = |
|
|
||||||||||||||||||||||||||||||
! |
col |
(b1;b2 ;...;bn ) |
; |
! |
! |
= |
col (a1 + |
b1;a2 + |
b2 ;...;an + |
|
bn ) . |
|
|
|
|
|
|
|||||||||||||||||
b = |
a + |
b |
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
Правило вычитания: |
|
! |
! |
= col (a1 − |
b1;a2 − |
b2 ;...; an − |
bn ) . |
|
|
|
|||||||||||||||||||||||
|
|
a − |
b |
|
|
|
||||||||||||||||||||||||||||
|
Правило умножения на число: |
α |
! |
= |
col (α |
a1;α |
a2 ;...; α |
an ) . |
|
|
|
|||||||||||||||||||||||
|
|
a |
|
|
|
|||||||||||||||||||||||||||||
|
Два вектора |
! |
и |
! |
|
|
|
|
! |
|
! |
|
|
|
тогда и только тогда, когда |
|||||||||||||||||||
|
a |
b |
равны ( a |
= b ) |
|
|
||||||||||||||||||||||||||||
равны их соответствующие координаты (ai=bi, |
i = |
|
|
). |
|
|
|
|
|
|
||||||||||||||||||||||||
1, n |
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
! |
! |
|
! |
|
|
|
|
|
|
|
|
|
Линейной комбинацией m векторов a |
1, a2 ,......a m называется век- |
||||||||||||||||||||||||||||||||
тор |
! |
λ |
|
! |
λ |
|
a2 |
+ |
...+ |
λ |
|
! |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, λ |
, . . ., λ |
|
|||
a = |
1 |
a1 + |
2 |
m |
am , где хотя бы одно из чисел λ |
1 |
m |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|||||
отлично от нуля. |
|
|
|
|
|
! |
|
! |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Ненулевые векторы |
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
a |
b коллинеарны тогда и только тогда, |
|||||||||||||||||||||||||||||||
когда |
! |
|
! |
(λ |
|
≠ |
0) , что через координаты записывается так: |
|
|
|||||||||||||||||||||||||
b |
= λ a |
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
a1 |
= |
a2 |
= ... = |
|
an |
|
. |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
b |
b |
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20. |
|
|
Скалярное |
|
|
произведение |
|
векторов. |
Скалярным |
||||||||||||||||||||||||
произведением двух векторов |
! |
! |
называется число, равное произ- |
|||||||||||||||||||||||||||||||
a |
и b |
|||||||||||||||||||||||||||||||||
ведению длин этих векторов на косинус угла между ними:
3 3

! ! |
|
! ! |
|
def |
|
|
|
|
|
|
|
! ! |
||||||
(a, b) = |
a b |
= |
|
a |
|
b |
|
|
|
|
||||||||
|
cos |
a, b . |
||||||||||||||||
|
! |
|
|
|
|
|
|
|
|
! |
|
|
|
|
|
|
|
|
Проекция вектора |
на ось |
определяется по формуле: |
||||||||||||||||
a |
e |
|||||||||||||||||
|
|
! |
|
|
= |
|
|
! |
|
|
|
! ! |
|
|||||
|
npe!a |
|
|
a |
cos |
a,e . |
||||||||||||
Из формул (1) и (2) имеем: |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|||||||||||
! |
! |
|
|
! |
|
|
|
|
! |
= |
|
! |
|
|
! |
|||
|
|
|
|
|
|
|
|
|||||||||||
(a,b) = |
|
a |
|
npa!b |
|
b |
|
npb! a . |
||||||||||
|
|
|
|
|||||||||||||||
(1)
(2)
(3)
Для скалярного произведения векторов имеют место следующие свойства:
1) |
! |
! |
|
! |
! |
– |
коммутативность; |
|
||||
(a,b) = |
(b, a) |
|
||||||||||
2) |
(α |
! ! |
|
|
|
! |
! |
|
|
R |
– ассоциативность; |
|
a,b) = |
α (a,b), α |
|||||||||||
3) |
! |
! |
! |
|
|
! ! |
|
! |
! |
– дистрибутивность; |
||
(a |
+ b,c) = |
|
(a,c) + |
(b,c) |
||||||||
4) |
! |
! |
|
! |
2 |
> 0, |
! |
≠ |
|
! ! |
! |
|
(a, a) = |
|
a |
|
a |
0 ; (a, a) = 0 |
a = 0 . |
||||||
Здесь R – множество действительных чисел.
Докажем, например, свойство 3). Используя формулу (3), свойство проекции и коммутативность скалярного произведения, получаем
(!
a
+ |
! ! |
! |
! |
+ |
! |
! |
! |
+ |
! |
! |
! |
+ |
! |
! |
= |
b, c) = |
c |
npc! (a |
b) = |
c |
(npc!a |
npc!b) = |
c |
npc!a |
c |
npc!b |
= (! !) + (! !) , что и доказывает свойство 3). a,c b,c
С помощью понятия скалярного произведения можно сформулировать необходимое и достаточное условие ортогональности двух векторов: два ненулевых вектора являются ортогональными тогда и только тогда, когда их скалярное произведение равно нулю.
Из равенства (1) получаем формулу для вычисления косинуса угла между ненулевыми векторами:
|
! ! |
|
|
! |
! |
|
|
|
|
|
|
(a,b) |
|
||||||
|
|
= |
|
|
|||||
|
|
|
|
|
|
|
|||
cos |
a,b |
|
! |
|
! |
. |
(4) |
||
|
|
|
|
a |
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Из соотношений (3) можно получить также формулы для вычисления проекции одного вектора на второй с помощью скалярного произведения:
3 4

!
npa!b =
(a,b) |
|
! |
|
||
! |
! |
|
|
|
|
|
! |
|
, |
np#a |
= |
|
a |
|
|
b |
|
|
|
|
|
|
|
! |
! |
|
|
|
(a,!b) |
. |
(5) |
||
|
b |
|
|
|
|
|
|
|
|
Следующая теорема отвечает на вопрос о представлении скалярного произведения в координатной форме.
Теорема 1.
! |
Скалярное |
произведение |
двух |
|
векторов |
! |
col (a1;a2 ;...; an ) и |
|||||||
|
a = |
|||||||||||||
b = |
col (b1;b2 ;...;bn ) |
равно сумме произведений соответствующих |
||||||||||||
координат: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
! |
! |
a1b1 + a2b2 + ...anbn . |
|
|
(6) |
||||||
|
|
|
(a,b) = |
|
|
|||||||||
|
Доказательство проведем для n |
! |
= 3. Рассмотрим декартову сис- |
|||||||||||
тему координат |
Oxyz, и пусть |
! |
! |
– соответствующие орты. Оче- |
||||||||||
i |
, j, k |
|||||||||||||
видно, что |
|
|
! ! |
= ( |
! |
# |
! |
! |
|
|
|
|
||
|
|
|
|
|
|
|
|
|||||||
|
|
|
(i ,i ) |
j, j) |
= (k , k) = 1 , |
|
|
(7) |
||||||
|
|
|
|
! ! |
|
! |
! |
! |
! |
|
|
|
||
|
|
|
(i , j) |
= (i , k) |
= ( j, k) = 0 . |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
! |
! |
|
Рассмотрим скалярное произведение векторов a и |
b, записав |
||||||||||||
их в форме разложения по ортам |
! |
|
! ! |
|
|
|
||||||||
i , j, k , и используем свойства ска- |
||||||||||||||
лярного произведения и равенства (7): |
|
|
|
|
||||||||||
|
! ! |
|
! |
! |
|
! |
! |
|
! |
! |
! ! |
|
||
|
(a,b)= |
(axi + |
ay j + |
azk,bxi + by |
j + |
bzk )= axbx (i ,i)+ |
|
|||||||
|
|
! |
! |
|
! |
! |
|
|
|
! ! |
! |
! |
|
|
|
+ axby (i |
, j)+ axbz (i , k)+ |
aybx (j |
, i ) + ay by( |
j, |
j) + |
|
|||||||
|
|
! |
! |
|
! |
! |
|
|
|
! |
! |
! |
! |
|
|
+ ay bz (j, k)+ azbx(k |
,i) + |
azby( k |
, )j + azb(z |
k ,)k = |
|
||||||||
= axbx + ayby + azbz ,
что и требовалось доказать.
Пример 1. Установить связь между направляющими косинусами вектора в пространстве R3.
|
|
|
! |
|
! |
( |
! |
|
|
! |
|
|
! |
) |
|
! |
|
! |
! |
|||
Имеем: |
|
|
a = |
a |
i |
cosα + |
|
j cosβ + |
k |
|
a+1i |
a+2 j |
a3k . |
|||||||||
|
|
|
|
cosγ = |
|
|||||||||||||||||
! |
! |
= |
|
! |
cos |
α |
= |
|
! |
! |
= |
! |
cos β = a2 |
, |
! |
! |
= |
! |
cos γ= a3 . |
|||
a |
i |
|
a |
a1, a |
j |
a |
a |
k |
a |
|||||||||||||
3 5
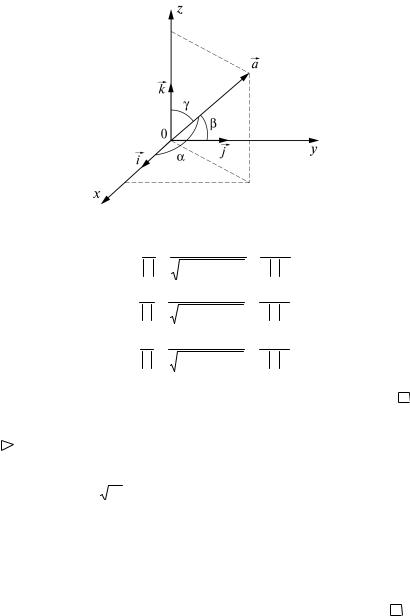
Рис. 3
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
! |
|
|
|
|
|
|
|
Отсюда: |
|
|
cos α |
= |
a!1 |
= |
|
a1 |
|
= |
пр!a |
; |
|
|
|
|
|
||||||
|
|
|
|
!i |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
a |
|
a12 + a22 + a32 |
a |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
a |
|
|
a |
|
|
|
! |
|
|
|
|
|
|
|
|
|
|
|
|
|
cosβ |
= |
= |
|
|
|
= |
пр !j a |
|
|
|
|
|
|
||||
|
|
|
|
|
|
!2 |
|
|
2 |
|
! |
|
; |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
a |
|
a12 + a22 + a32 |
a |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
! |
|
|
|
|
|
|
|
|
|
|
|
|
|
cos γ= |
a!3 |
= |
|
a3 |
|
= |
пр !a |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
!k |
|
; |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
a |
|
a12 + a22 + a32 |
a |
|
|
|
|
|
|
|||||
! |
! |
= |
! |
2 |
(cos2 α |
|
+ cos2 β + |
cos |
2 γ) = |
! |
2 |
cos2 α + |
|
cos2 β |
+ |
cos2 λ |
= 1. |
||||||
a a |
a |
|
|
a |
|
|
|||||||||||||||||
|
Пример 2. |
Даны векторы |
! |
= |
col (3; − |
2; 1) |
|
и |
! |
= |
col |
(− 1;1; − 2) . |
|||||||||||
|
a |
|
b |
||||||||||||||||||||
|
|
|
|
|
! |
= col (c1; c2 ; c3) , |
|
|
|
|
|
|
|
|
|
! |
|
! |
|||||
Найти вектор c |
ортогональный векторам a |
и b, если |
|||||||||||||||||||||
его длина равна |
|
35 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Решение. |
По |
условию |
ортогональности |
векторов |
имеем |
||||||||||||||||
3с1 – 2с2 + с3 = 0 |
|
и –с1 + с2 – 2с3 = 0. |
|
Кроме |
того, |
|
по |
условию |
|||||||||||||||
(с )2 |
+(с )2 +(с )2 = 35. Решая систему полученных трех уравнений, находим |
||||||||||||||||||||||
1 |
|
2 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c!1 = |
col (3; 5;1) , |
|||
c1 = |
±3, c2 |
|
= ±5, c3 |
= ±1 . |
Итак, имеем два |
вектора |
|||||||||||||||||
c!2 = |
col (− |
|
3; − 5; − |
1) , которые удовлетворяют условиям примера 2. |
|||||||||||||||||||
3 6

Рис. 4 |
Рис. 5 |
30. Проекции двумерного вектора |
в повернутой си- |
стеме координат. Пусть задан вектор в декартовой системе коор-
динат Ox1x2 в двумерном пространстве: |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
! |
|
|
|
! |
+ |
|
! |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
= a1i |
a2 j . |
|
|
|
|
|||||
|
|
|
|
Нужно найти проекции (координаты) |
a′и |
a′этого вектора в по- |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
вернутой на угол ϕ |
системе координат Ox ′x′(рис. 4): |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
! |
|
|
|
! |
|
|
! |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
= a′i ′+ |
a′j ′, |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
||
где i!′, !j ′– орты новых координатных осей. |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
Из рис. 5 видно, |
что |
i! = |
OA + OB = |
cos ϕ |
i!′− sin ϕ !j ′, |
т.к. |
|||||||||||||||
|
OA |
|
= |
cos ϕ , |
|
OB |
|
= sin ϕ , |
|
|
i!′= |
|
|
!j ′= 1. |
Аналогично, !j = |
sin ϕ i!′+ cos ϕ |
!j ′. |
||||||||
|
|
|
|
|
|
||||||||||||||||||||
|
Таким образом, |
|
|
|
a2(cos ϕ |
|
|
|
|
|
|
|
|
||||||||||||
! |
|
|
! |
|
|
|
! |
|
! |
|
|
! |
! |
|
+ a2 sin ϕ ) + |
|
|||||||||
|
a = |
a1 (cos ϕ i ′− sin ϕ |
j ′)+ |
j ′+ |
sin ϕ i )′= |
i ′(a1 cos ϕ |
|
||||||||||||||||||
|
|
|
|
+ |
! |
′(a |
|
cos ϕ − a |
sin |
|
! |
! |
′. |
|
|
||||||||||
|
|
|
|
j |
2 |
ϕ ) = a′i ′+ a′j |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
2 |
|
|
|
|||
Векторы равны, если равны их соответствующие проекции на оси i!′и !j ′:
a1′= a1 cos ϕ + a2 sin ϕ ,
a′= |
a |
2 |
cos ϕ − a |
sin ϕ . |
2 |
|
1 |
|
3 7
! Задания для самостоятельной работы
1. |
Даны точки А (–1; 5; –10), |
В (5; –7; 8), С (2; 2; –7), D (5; –4; 2). |
|||||||
Проверить, что векторы AB и CD коллинеарны. Во сколько раз один |
|||||||||
из этих векторов длиннее другого? |
|
|
|
|
|||||
2. |
Найти прCD AB , |
если |
А (1; –2; 3), |
В (4; –4; –3), С (2; 4; 3), |
|||||
D (8; 6; 6). |
|
|
|
|
|
|
! |
||
3. |
Найти направляющие косинусы вектора |
||||||||
a = col (2; − 1; 2) . |
|||||||||
4. |
Найти угол между диагоналями параллелограмма, построен- |
||||||||
|
! |
= col (2; 1; 0) |
и |
! |
col (0; − 2; 1) . |
||||
ного на векторах a |
b = |
||||||||
5. |
Убедиться, |
что |
(a )2 + ( a ) |
2 = |
(a′)2 |
+ ( a′) 2 |
, т.е. длина отрез- |
||
1 |
2 |
|
1 |
2 |
|||||
ка прямой при повороте не меняется.
6. Вычислить косинус тупого угла между медианами, проведенными из вершин острых углов равнобедренного прямоугольного треугольника.
7. Найти вектор |
! |
|
|
|
! |
= col (1; − 2; 3) и |
c |
, коллинеарный вектору a |
|||||
удовлетворяющий условию |
! |
! |
= 5 . |
|
||
c |
a |
|
||||
Замечание 1. Дальше символ «col» будем опускать, если это не создает недоразумений.
3 8

 Лекция 7
Лекция 7
Матрицы и определители
Дается понятие матрицы, определителя квадратной матрицы, рассмотрены свойства определителей и правила их вычисления.
10. Понятие матрицы. Матрицей порядка m ×n (размерности m ×n) называют прямоугольную таблицу чисел или буквенных выражений, содержащую m строк и n столбцов:
A = (aij ) = a =
|
a11 |
|
a21 |
|
" |
|
|
|
am1 |
|
a12 |
$ a1n |
|
a22 |
$ a2n |
|
" |
" |
" . |
am2 |
|
|
$ amn |
||
Квадратной матрицей называется матрица, у которой число строк равно числу столбцов.
Матрицы равны между собой, если равны все соответствующие
элементы этих матриц, т.е. A = B, если аij = bij при i = 1, m, j = 1, n . Транспонированной матрицей АТ называется такая матрица, у
которой все строки заменены соответствующими столбцами. В общем случае для квадратных матриц А ≠ АТ. Например,
A = |
a11 |
a12 |
|
≠ |
A |
T |
= |
a11 |
a12 |
|
|
||
|
|
|
|
|
|
|
|
|
≠ а21. |
||||
|
|
a21 |
|
|
|
|
|
|
|
a21 |
|
, если а12 |
|
|
|
a22 |
|
|
|
|
|
a22 |
|
||||
Если А = АТ, то матрица А называется симметричной. Из Л.6 следует, что m-мерный вектор – это матрица, содержащая один столбец,
|
|
a1 |
|
! |
|
|
|
|
т.е. |
|
" |
|
|
|
|
|
|
|
= |
a. Матрицу, содержащую одну строку, называют транспо- |
||||||
|
|
|
|
|
|
|
|
|
|
|
am |
|
|
|
|
! |
|
нированным n–мерным вектором, т.е. (a ;a |
|
;...;a |
||||||
2 |
) = aT . |
|||||||
|
|
|
|
1 |
|
n |
|
|
|
|
Нулевой называется матрица, у которой все элементы равны |
||||||
|
|
|
|
|
= |
0 |
0 |
|
нулю. Например, нулевая 2 2 –матрица 0 |
|
. |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
3 9

20. Понятие определителей второго и третьего по-
рядка. По определенному правилу каждой квадратной матрице А можно поставить в соответствие число, которое называется определителем
(используют обозначения ∆ , det A, A ).
Если порядок матрицы равен единице, то она составлена из од-
ного элемента a11. Определителем первого порядка, который соответ- |
|||||
ствует матрице A = (a11) , назовем число |
a11 : ∆ = a11 . |
||||
Для квадратной матрицы |
A = |
|
a11 |
a12 |
назовем определителем |
|
|
|
|||
|
|
|
a21 |
|
|
|
|
|
a22 |
|
|
второго порядка число, которое равно разности произведений элементов главной диагонали и побочной:
∆ = |
a11 |
a12 |
= a11 a22 − a21 a12 . |
(1) |
|
a21 |
a22 |
|
|
Дальше будем называть элементами, строками, столбцами те элементы определителя A произвольного порядка, которые стоят на том же месте, что и соответствующие элементы, строки и столбцы матрицы А.
|
|
a11 |
a12 |
a13 |
|
|
|
Для матрицы |
A = |
|
a21 |
a22 |
a23 |
|
определителем третьего поряд- |
|
|
||||||
|
|
|
a31 |
a32 |
|
|
|
|
|
|
a33 |
|
|||
ка назовем число, определяемое равенством:
∆ = |
a11 |
a12 |
a13 |
= a11 |
|
a22 |
a23 |
|
− |
a12 |
|
a21 |
a23 |
|
+ |
a13 |
|
a21 |
a22 |
|
|
|||||
|
|
|
|
|
|
|
||||||||||||||||||||
a21 |
a22 |
a23 |
|
|
|
|
|
. |
(2) |
|||||||||||||||||
|
|
|
|
|
|
a |
a |
33 |
|
|
|
|
a |
31 |
a |
33 |
|
|
|
|
a |
31 |
a |
32 |
|
|
|
a31 |
a32 |
a33 |
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Отметим, что для вычисления определителя третьего порядка используют алгебраическую сумму произведений элементов первой строки и определителей второго порядка из элементов второй и третьей строк.
Используя равенство (1), определение определителя третьего порядка (2) можно записать в другом виде:
4 0