

§ 2. Усилия и напряжения в ремне
При движении ремень передает усилие с ведущего шкива на ведомый за счет сил сцепления (трения) на поверхностях контакта, определяемых углом αi (i — номер шкива, i = 1,2) обхвата ремнем шкива (рис. 18.5). Для создания между ремнем и шкивами сил трения ремень прижимают к шкивам усилием предварительного натяжения Fo.
Под действием вращающего момента Т1 в ведущей ветви (набегающей на ведущий шкив) передачи натяжение возрастет до некоторой величины F1 вследствие появления момента сопротивления Т2, а усилие в ведомой ветви (сбегающей с ведущего шкива) уменьшится до величины F2.
При этом полезная нагрузка ремня (окружное усилие), равная силе трения между ремнем и шкивом, будет передаваться по всей дуге обхвата
![]()
 где
qтр
—
удельная сила трения; Ак
— площадь поверхности контакта
ремня со шкивом.
где
qтр
—
удельная сила трения; Ак
— площадь поверхности контакта
ремня со шкивом.
Если использовать модель ремня в виде гибкой нерастяжимой нити, то усилия в ветвях передачи при действии рабочей нагрузки F, можно связать соотношением Л. Эйлера (см. с. 84), которое при учете центробежных сил примет вид
![]()
где f— коэффициент трения между ремнем и шкивом; αск — угол дуги скольжения ремня по шкиву.
С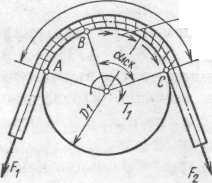
![]() учетом равенства (18.1) несложно
найти
учетом равенства (18.1) несложно
найти
![]()
откуда напряжения в сечениях ведущей и ведомой ветвей ремня от начального натяжения
Рис. 18.5. Схема
взаимодействия ремня со шкивом
![]() (18.3)
(18.3)
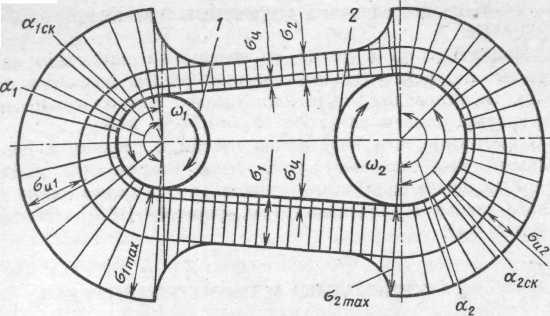
Рис. 18.6. Распределение напряжений в ремне передачи
и при действии внешней нагрузки
![]()
![]() (18,4)
(18,4)
где А — площадь поперечного сечения ремня.
Изменение напряжений вдоль ремня показано на рис. 18.6. Наибольшие напряжения испытывают наружные волокна в зоне контакта ремня с малым шкивом. Здесь к растягивающим напряжениям σ1 от усилия натяжения F1 добавляется напряжение растяжения от изгиба ремня (как стержня) вокруг шкива
![]()
(18.5)
Окружные растягивающие напряжения от центробежных сил находят, полагая, что ремень является кольцом, вращающимся со скоростью v (р — плотность материала ремня):
(![]() 18.6)
18.6)
Максимальные напряжения изгиба в ремне, как и в кольце, зависят от наименьшего диаметра D1 шкива и толщины ремня h:
![]() (18,7)
(18,7)
где Е - приведенный модуль упругости ремня, для прорезиненных ремней Е = 200 .. 300 МПа, для капроновых ремней Е = 600 МПа, для клиновых кордотканевых ремней Е = 500 ..600 МПа.
Напряжения σ0 в ремне от начального натяжения назначают из условия обеспечения наибольшей долговечности ремня. На основании опыта эксплуатации передач с плоским и клиновым ремнем назначают σ0= 1,2 ..1,8 МПа.
Существенно, что напряжения изгиба а σи являются переменными, они вызывают усталостное повреждение ремня. Для уменьшения напряжений минимальное значение диаметра малого шкива ограничивают [см. формулу (18.7)]. Обычно D1/h=25..45
§ 3. Кинематика и геометрия передач
Скольжение в передаче. Работа упругого ремня сопровождается его неизбежным проскальзыванием, вызванным различным натяжением ведущей и ведомой ветвей и, как следствие, неравномерным распределением деформаций растяжения и сдвига по дуге обхвата. При обегании ремнем ведущего шкива натяжение его падает, ремень укорачивается и проскальзывает по шкиву. На ведомом шкиве ремень удлиняется, опережая шкив. Опытом установлено, что на первом участке АВ - дуге сцепления (см. рис. 18.5) за счет нарастающих тангенциальных сил сцепления (меньших полных сил трения) передается малая часть нагрузки, а деформации сдвига ремня (показаны тонкими линиями) приводят к небольшому относительному снижению его скорости.
В точке В силы сцепления становятся равными силам трения, происходит срыв и начинается скольжение ремня по дуге ВС — дуге скольжения. На этой дуге с углом αск за счет нарастающих от точки В к точке С сил трения передается основная часть окружного усилия и имеет место значительное снижение окружной скорости.
Снижение скорости от v1 (для ведущей ветви) до v2 (для ведомой ветви) характеризуют относительным скольжением
![]()
Передаточное отношение
![]()
В расчетах принимают ξ = 0,01 - 0,02.
Быстроходность передачи. Если окружные напряжения в ремне, определяемые по формуле (18.6), σц=σ0 , то давление на всей дуге обхвата будет равно нулю, и передача не сможет передавать нагрузку. Окружная скорость на шкиве при этом
![]()
Для ремня из капрона можно принять напряжение от начального натяжения σ0= 50 МПа и v1Kp = 150 м/с.
С увеличением быстроходности возрастают потери на трение и при окружной скорости t)Kp = |/сто/5р потери на трение будут наибольшими. Режимов работы передачи со скоростью v2kp следует избегать из-за опасности перегрева ремня.
Оптимальная скорость ремней 20 — 25 м/с, а наибольшая допустимая 30 — 35 м/с. Узкие клиновые ремни с улучшенным кордом могут работать при скоростях до 40 — 60 м/с.
Геометрия передачи. Основными геометрическими параметрами передач являются диаметры шкивов Dt и D2, межосевое расстояние а, длина ремня L и угол обхвата α на меньшем шкиве. .
Для ограничения напряжений изгиба (см. с. 295) диаметр Dt меньшего шкива в клиноременной передаче регламентирован стандартом для каждого сечения ремня (ГОСТ 1284-80). Для передач с плоским ремнем минимальный диаметр (мм) меньшего шкива находят по эмпирической формуле
![]()
где P1 — передаваемая мощность, кВт; п1 — частота вращения меньшего шкива, об/мин.
Минимальное межосевое расстояние в плоскоременных передачах
amin = 0,5(Dl+D2),
в клиноременных передачах (на основе данных эксплуатации) amin = 0,55 (Dl+D2) + h.
Для увеличения долговечности ремня принимают а > amin.
Максимальное межосевое расстояние по экономическим соображениям (во избежание увеличения габаритов и стоимости ремней) рекомендуют ограничивать величиной
аmax = 2(D1+ D2).
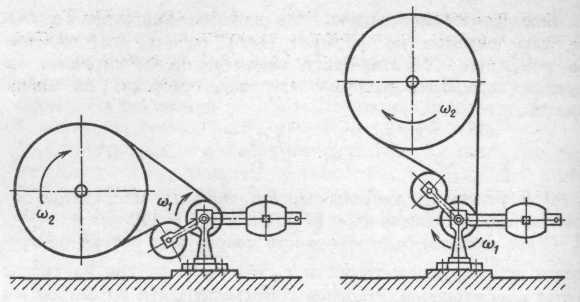
Рис. 18.7. Схема передач с натяжным роликом
Требуемая длина ремня для открытой передачи при заданном (или желательном) межосевом расстоянии а и угле обхвата а определяется как сумма прямолинейных участков и дуг обхвата
![]()
Угол обхвата меньшего шкива
![]()
Рекомендации по выбору а даны ниже. Длину для передач с натяжным роликом (рис. 18.7) находят аналогично.