Глава 36
НЕКОТОРЫЕ ЗАДАЧИ ОПТИМИЗАЦИИ КОНСТРУКЦИЙ
§ 1. Расчет вала минимальной массы
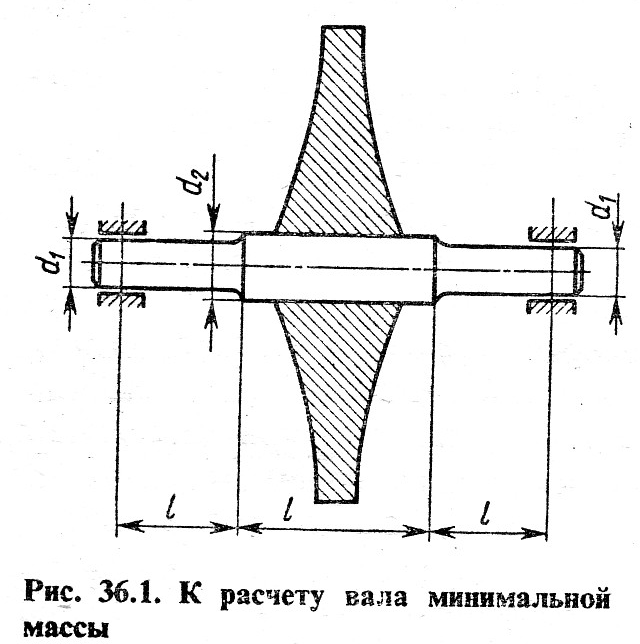
Рассмотрим ступенчатый быстро вращающийся вал с тяжелым диском посредине (рис. 36.1).
Если масса диска существенно больше ожидаемой массы вала (р — массовая плотность материала вала)
![]()
![]() то
поперечные размеры вала (диаметрыd1
и d2)
будут определяться
не условиями прочности, а условиями
динамической устойчивости (см. гл.
14).
то
поперечные размеры вала (диаметрыd1
и d2)
будут определяться
не условиями прочности, а условиями
динамической устойчивости (см. гл.
14).
Во избежание больших поперечных колебаний вала его рабочая угловая скорость
![]()
![]() (36.1)
(36.1)
где ωкр — критическая угловая скорость; к — коэффициент, к < 0,7.
Критическая угловая скорость вала
■
![]() (36.2)
(36.2)
здесь α — податливость вала (прогиб среднего сечения вала от действия единичной силы);
![]() (36.3)
(36.3)
где Е — модуль упругости материала вала.
Подставляя соотношения (36.2) и (36.3) в равенство (36.1), получим условие динамической устойчивости вала в виде
![]()
где
![]()
Определим диаметры ступеней вала d1 и d2 из условия минимума массы вала т.
Целевая функция в рассматриваемой задаче
![]()
а ограничение
![]()
Записываем функцию Лагранжа
L = w + λg,
где λ — некоторая постоянная.
Необходимое условие экстремума этой функции
![]()
![]()
![]()
Из этих условий находим оптимальное соотношение диаметров d2/d1 = 1,3. Подставляя это значение в последнее равенство, получим
![]()
§ 2. Расчет многоступенчатого редуктора минимальных размеров
При проектировании многоступенчатых редукторов возникает задача о распределении передаточных чисел между ступенями, которое бы обеспечило минимальные размеры и, как следствие, массу редуктора.
Показателем, определяющим габариты редуктора с цилиндрическими колесами, является сумма межосевых расстояний между валами.
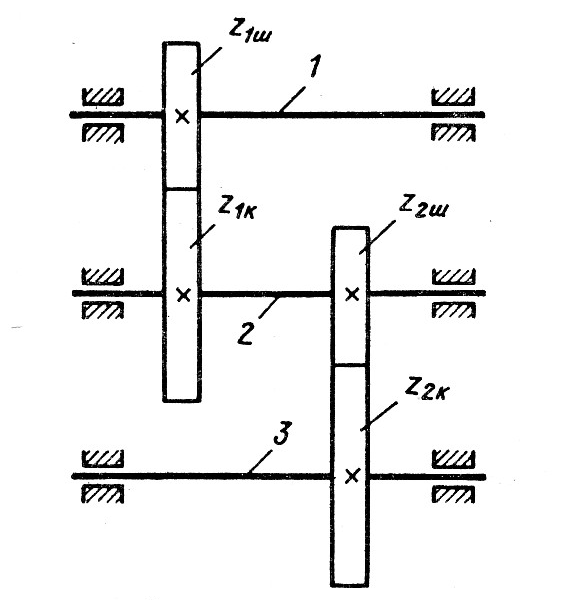
Рис. 36.2. Схема двухступенчатого редуктора
Рассмотрим для простоты двухступенчатый редуктор (рис. 36.2). Межосевое расстояние для i-й ступени редуктора (i = 1, 2)
ai = 0,5m i (zim + zjK) = 0,5jш (1 + ij),
где mi- модуль зубчатых колес i-й ступени; ziш и ziK - число зубьев шестерни и колеса; i — передаточное отношение.
Сумма межосевых расстояний
a∑ = а1 + а2= 0,5m1 z1ш (1 + i1 ) + 0, 5 m2 z2ш (1 + i2).
Если принять, что zlш = z2 ш, то это равенство можно записать в виде
a∑
= 0,5m1
z1ш
[1 + i1
![]() (1 + i2)].
(36.4)
(1 + i2)].
(36.4)
Модуль зуба определяется изгибной прочностью (см. с. 344). Используя равенство (см. с. 350), запишем (YF1 = YF2; K Fβ1 = K Fβ2 и Km1= К m2)
![]()
где Т1ш и T2ш — вращающие моменты на шестернях первой и второй ступеней редуктора; ψbd1 и ψbd2— коэффициенты ширины колес первой и второй ступеней; [σF1] и [σF2] — допускаемые напряжения при изгибе для материалов шестерен первой и второй ступеней соответственно.
Учитывая, что T2 = i1T1 при [σF1] = [σF2] и ψbd1 = ψbd2 получим
![]() (36.6)
(36.6)
Подставляя равенство (36.6) в уравнение (36.4) находим
a∑
=
![]() [1 + i1
+
[1 + i1
+
![]() (1 + i2)].
(1 + i2)].
Общее передаточное отношение
i = i1i2 (36.7)
Для нахождения экстремума функции a∑ = w, в которой переменные i1 и i2 связаны зависимостью g=i — i1i2 = 0, также применим метод Лагранжа.
Функция Лагранжа
L= a∑ + λg,
где λ— некоторая постоянная.
Условия экстремальных значений функции L запишем в виде
![]()
Решение дает следующую зависимость между передаточным отношением двух последовательных ступеней:
![]()
С учетом равенства (36.7) можно записать
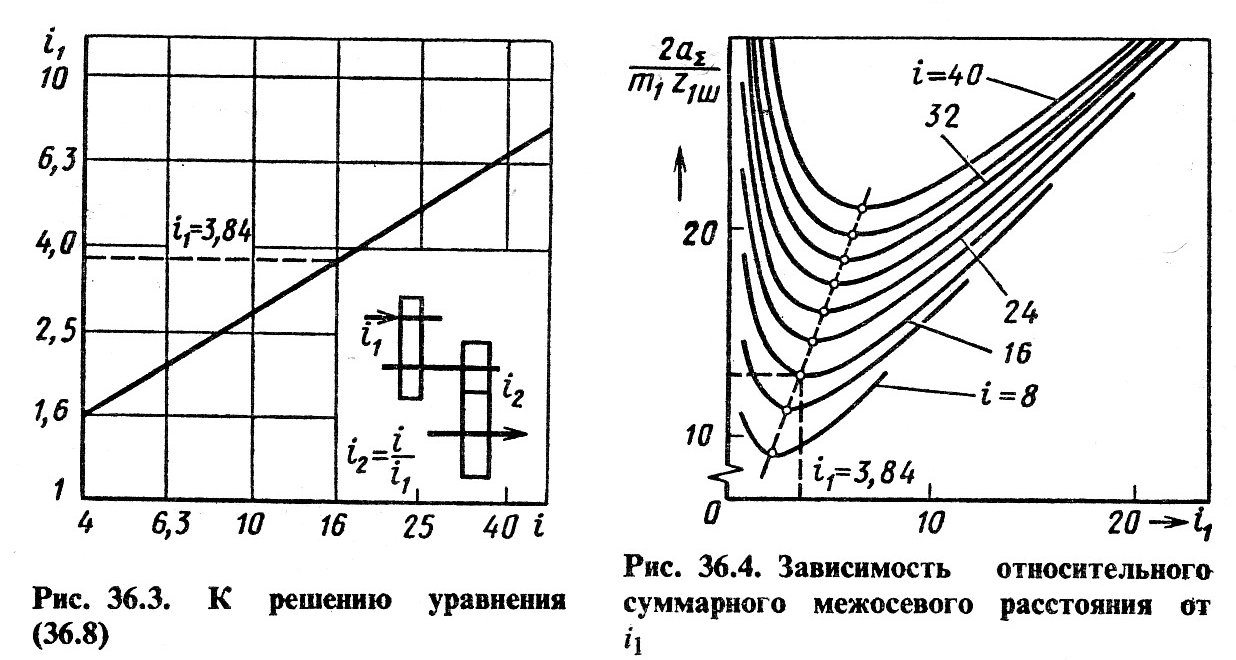
![]() (36.8)
(36.8)
Решение этого уравнения дано на рис. 36.3, а зависимость суммарного относительного межосевого расстояния от передаточного отношения первой ступени редуктора показана на рис. 36.4. На этом рисунке виден ярко выраженный минимум относительного межосевого расстояния.
Из приведенного выше расчета несложно установить границы целесообразного (с точки зрения суммарного межосевого расстояния) перехода от одно- к двухступенчатому редуктору.
Для одноступенчатого редуктора межосевое расстояние равно
![]()
а для двухступенчатого редуктора
a∑
=
![]() [1 + i1
+
[1 + i1
+
![]() (1 +
(1 +![]() )].
)].
Приравнивая а1 = a∑ получим условие, определяющее границу целесообразного перехода в виде
i(![]() -1)
+ i1
+
-1)
+ i1
+
![]() =0.
(36.9)
=0.
(36.9)
Это уравнение с учетом выражения (36.8) дает значение суммарного передаточного отношения i = 8,64, выше которого целесообразен переход с одно- на двухступенчатый редуктор независимо от числа зубьев шестерни.