

§ 3. Расчет соединений
ПРИ НЕСИММЕТРИЧНОМ НАГРУЖЕНИИ
Если соединяемые элементы подвержены изгибу (случай несимметричного нагружения), то нагрузка между одиночными заклепочными соединениями распределяется неравномерно. В этом случае расчет групповых соединений сводится обычно к определению наиболее нагруженной заклепки и оценке ее прочности.
Рассмотрим соединение, содержащее п заклепок одинакового диаметра d под действием силы F (рис. 30.6, а). Примем для упрощения, что трение между соединяемыми деталями отсутствует и вся внешняя нагрузка передается через заклепки. Будем считать, что деформации (изгиб, сдвиг) соединяемых деталей малы по сравнению с деформациями стержней заклепок. При этих допущениях можно полагать, что возможный взаимный поворот соединяемых деталей (листов) произойдет вокруг точки С (см. рис. 30.6, а) — центра тяжести поперечных сечений стержней заклепок. Следовательно, точку С можно использовать в качестве центра приведения внешней силы F.
В результате приведения внецентренной силы F в точку С задача расчета группового соединения сводится к определению наиболее нагруженной заклепки от действия центральной силы F (или ее осевых составляющих) и вращающего момента Т= FL
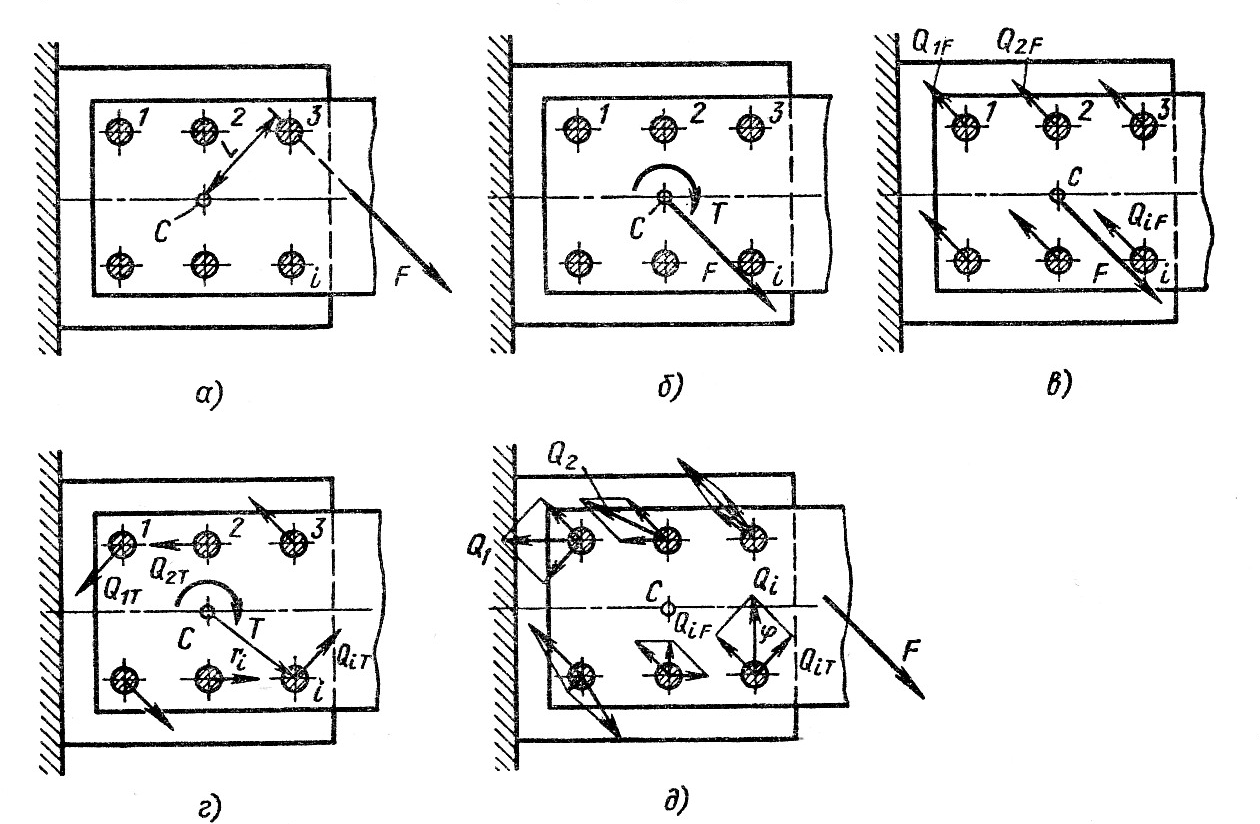
Рис. 30.6.. Расчетные схемы заклепочного соединения при несимметричной нагрузке
(рис. 30.6, б; L—расстояние от точки С до линии действия силы F, см. рис. 30.6, а).
Если соединение подвержено действию нескольких сил Fu F2,...,Fn, то в результате приведения их к точке С оно будет нагружено главным вектором и главным моментом от этих сил.
При упругой деформации заклепок действие каждого силового фактора F и Т можно рассматривать независимо. Тогда усилие, приходящееся на каждую заклепку, от силы F (рис. 30.6, в) равно, как обычно,
![]()
где i — номер заклепки, i = 1, 2,3, ..., п.
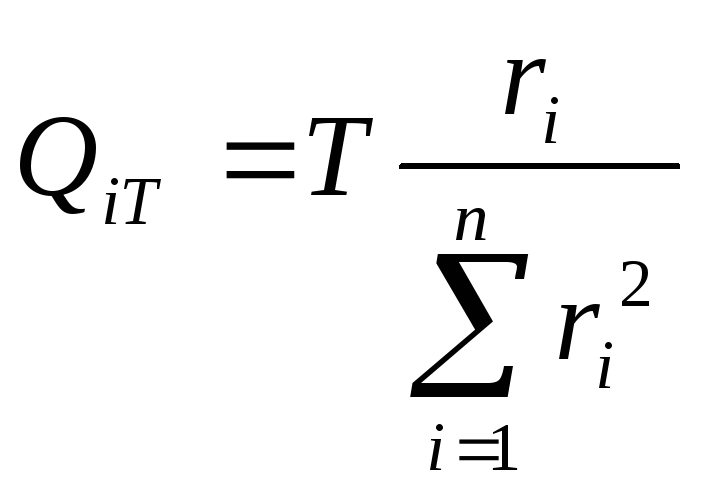
Момент Т вызовет в
каждой заклепке реактивное усилие
![]() ,
направленное
перпендикулярно радиусу-вектору rt,
проведенному из
точки С в центр сечения i-й
заклепки (рис. 30.6, г).
Усилие будет
пропорционально перемещению сечения
в результате деформации сдвига. Так
как сдвиги сечений заклепок прямо
пропорциональны их расстояниям
,
направленное
перпендикулярно радиусу-вектору rt,
проведенному из
точки С в центр сечения i-й
заклепки (рис. 30.6, г).
Усилие будет
пропорционально перемещению сечения
в результате деформации сдвига. Так
как сдвиги сечений заклепок прямо
пропорциональны их расстояниям
![]() до центра тяжести, то можно записать
до центра тяжести, то можно записать
![]()
откуда
![]() (30.2)
(30.2)
Если учесть, что внешний момент Т уравновешивается моментами от усилий на заклепки, т. е.
![]()
то после подстановки в это уравнение равенств (30.2) получим
![]()
или усилие на i-ю заклепку
 (30.3)
(30.3)
Усилие на наиболее нагруженную заклепку (рис. 30.6, д)
![]()
откуда модуль этого усилия
![]()
где
![]() - угол между векторами силQF
и QiT,
- угол между векторами силQF
и QiT,
Диаметр заклепки при известном значении Qmax и ее материале находим по формуле (30.1).