

§ 9. Усилия в зацеплении
Выше рассмотрены геометрические параметры и кинематические особенности взаимодействия зубьев колес. При этом полагали, что влияние деформации зубьев и тел колес на рассматриваемые параметры не существенно.
Для обоснованного назначения размеров колес и оценки их работоспособности необходимо знать меру их механического взаимодействия — напряжения и деформации и их предельные оценки (критерии работоспособности). Между тем достаточно точный расчет напряжений и деформаций в точках зубчатого колеса связан со значительными математическими трудностями и может быть реализован методами теории упругости. В связи с этим на этапе проектирования выполняют приближенный расчет напряжений и деформаций в зубьях колес в два приема: 1) находят усилия в зацеплении — главный вектор действующих контактных давлений; 2) определяют напряжения в наиболее опасных точках колеса под действием этих сил и оценивают прочность колеса.
При определении усилий в зацеплении используют методы теоретической механики, силами трения пренебрегают ввиду их малости.
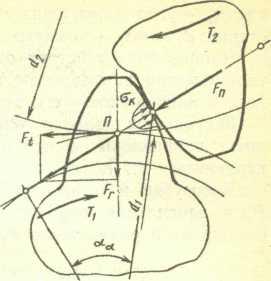
Рис. 20.23. Зацепление цилиндрических колес прямозубых
Нормальная сила между парой контактирующих зубьев (рис. 20.23)
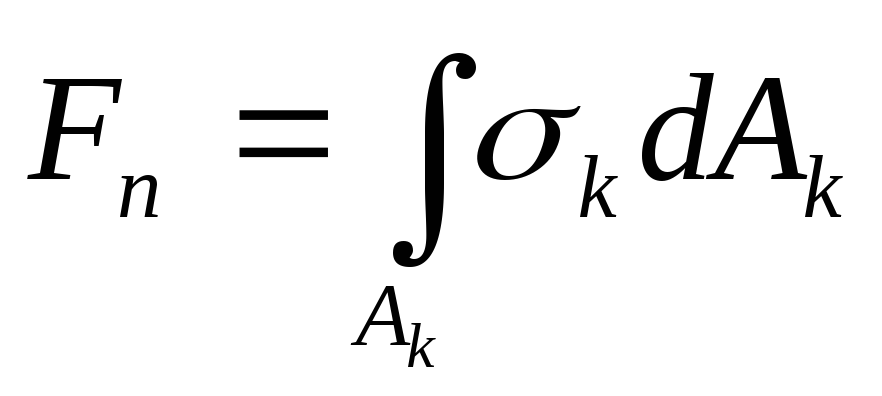
Где
![]() контактное
напряжение;
контактное
напряжение;![]() площадь
поверхности контакта.
площадь
поверхности контакта.
Эта сила будет
направлена по линии зацепления (как по
общей нормали к рабочим поверхностям
зубьев) так, чтобы момент этого усилия
относительно оси колеса уравновешивал
бы действующий вращающий момент
![]() .
.
Сила
![]() является
также исходной для расчета валов и
поддерживающих валы опор. В этом случае,
принимая для упрощения, что контакт
зубьев происходит в полюсе зацепления
П (его
положение известно заранее), силу Fn
раскладывают
на составляющие.
является
также исходной для расчета валов и
поддерживающих валы опор. В этом случае,
принимая для упрощения, что контакт
зубьев происходит в полюсе зацепления
П (его
положение известно заранее), силу Fn
раскладывают
на составляющие.
Прямозубая цилиндрическая передача. Силу Fn раскладывают на окружную Ft и радиальную Fr составляющие. Для упрощения расчетов окружную силу в полюсе определяют по отношению к делительной окружности и обозначают Ftw :
![]()
![]()
![]() (20.15)
(20.15)
где
![]() -
угол зацепления;
-
угол зацепления;![]() -
вращающий момент на шестерне;
-
вращающий момент на шестерне;![]() -
диаметр
делительной окружности шестерни.
-
диаметр
делительной окружности шестерни.
Направление действия окружной силы для шестерни противоположно направлению ее вращения, а для колеса совпадает с направлением его вращения.
Векторы радиальных усилий у колес с внешним зацеплением направлены к центру, а у колес с внутренним зацеплением — от центра зубчатого колеса.
Косозубая и шевронная цилиндрические передачи. Усилие Fn в зацеплении передачи раскладывают на окружную Fv ,осевую Fa и радиальную Fr составляющие (рис. 20.24):
![]() ;
(20.16)
;
(20.16)

здесь
![]() - угол зацепления косозубой передачи в
нормальном сечении, ;
- угол зацепления косозубой передачи в
нормальном сечении, ;![]() -угол наклона линии зуба.
-угол наклона линии зуба.
Осевая сила Fa дополнительно нагружающая опоры валов, является недостатком косозубых передач. Этот недостаток устраняется в шевронной передаче, которую можно рассматривать как сдвоенные косозубые передачи с противоположным направлением зубьев (см. рис. 20.14).
Для ограничения
осевой нагрузки на подшипники рекомендуют
принимать для косозубых колес
![]() <20°,
а для шевронных колес
<20°,
а для шевронных колес![]() <
40°.
<
40°.
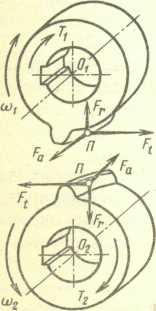
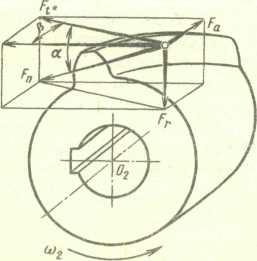
Рис. 20.24. Зацепление косозубых колес
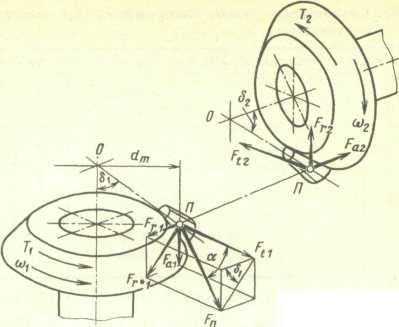
Рис. 20.25. Зацепление конических колес
Направление окружной и радиальной сил такое же, как и в прямозубой передаче. Осевая сила параллельна оси колеса, а направление вектора зависит от направления вращения колеса и направления линии зуба.
Прямозубая коническая передача. В зацеплении конической передачи полное усилие Fn также раскладывают на три составляющие (рис. 20.25), рассчитываемые по среднему диаметру dm = mtmz (здесь mmt -окружной модуль в среднем нормальном сечении зуба):
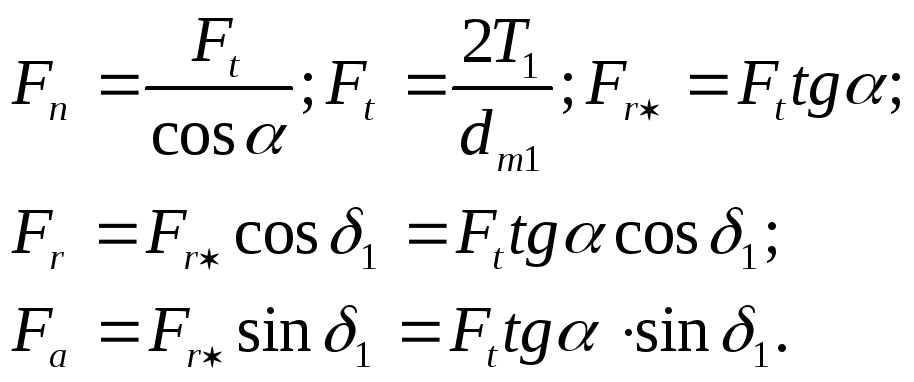 (20.17)
(20.17)
Обратим внимание, что направление сил на шестерне и колесе противоположно, а силы Fa1 = Fr2 и Fr1 = Fa2.