

§ 2. Кинематика зубчатых передач
Основной кинематической характеристикой зубчатой передачи (рис. 20.4) является передаточное отношение

Рис. 20.4. Кинематическая схема двухступенчатой зубчатой передачи
![]() (20.1)
(20.1)
выражающее отношение угловых скоростей ω1 и ω2 колес при передаче движения от колеса 1 к колесу 2. При передаче движения от ведущего колеса к ведомому индекс 12 при i часто опускают.
З![]() убья
равномерно расположены на теле колеса
и поворотведущего
колеса на один зуб вызывает поворот
ведомого колеса
тоже на один зуб. Несложно убедиться,
что
убья
равномерно расположены на теле колеса
и поворотведущего
колеса на один зуб вызывает поворот
ведомого колеса
тоже на один зуб. Несложно убедиться,
что
Отношение числа зубьев большего колеса к числу зубьев меньшего колеса (шестерни) называют передаточным числом и. Передаточное число либо равно передаточному отношению, либо является его обратной величиной.
По геометрическим и конструктивным соображениям желательно, чтобы колесо имело не меньше 10—13 зубьев и не больше 100—130 зубьев. При этом передаточное отношение зубчатой пары в среднем составит от 10 до 0,1. Если необходимо передаточное отношение, выходящее за эти пределы, применяют несколько последовательно расположенных зубчатых пар — ряд зубчатых колес.
Предположим, что требуется передать движение от вала 1 к валу 3 (см. рис. 20.4) с передаточным отношением, выходящим за пределы, допускаемые одной парой колес. Тогда, располагая между этими валами вал 2 и закрепляя на валах колеса z1 z2, z3 и z4, получим ряд зубчатых колес, состоящий из двух ступеней; z1 и z2 и z3 и z4.
Если угловая скорость вала 1 равна ω1, то угловая скорость вала 2
![]()
Угловая скорость вала 3
![]()
учетом этих равенств получим
![]()
Таким образом, угловая скорость ведомого вала ряда равна угловой скорости ведущего вала, умноженной на дробь, в числителе которой произведение числа зубьев ведущих колес ступеней, а в знаменателе — произведение чисел зубьев ведомых колес.
Общее передаточное отношение ряда
![]()
(20.2)
равно произведению передаточных отношений отдельных пар колес (ступеней).
§ 3. Элементы теории зацепления передач
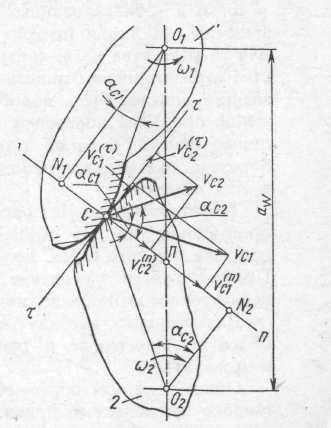
Рассмотрим передачу вращения двумя звеньями (рис. 20.5). Если предположить, что звенья 1 и 2 являются абсолютно твердыми (недеформируемыми) телами, то, действуя друг на друга в точке С контакта, они будут вращаться в противоположные стороны с угловыми скоростями ω1, и ω2. Найдем соотношение между этими скоростями.
О![]()
![]() кружные
(линейные) скорости точки С
на
каждом из
звеньев
кружные
(линейные) скорости точки С
на
каждом из
звеньев
Проведем в точке С контакта нормаль п — п и касательную τ — τ к профилям звеньев и разложим скорости vcl и vc2 на нормальные и касательные составляющие.
 Тогда
нормальные составляющие
скоростей (см. рис. 20.5)
Тогда
нормальные составляющие
скоростей (см. рис. 20.5)
![]()
![]() (20.3)
(20.3)
Рис. 20.5. Передача вращения двумя звеньями
где αCi- — угол между абсолютной скоростью точки контакта тела vCi и нормалью к профилю в этой же точке, численно равен углу между радиусом OiC и перпендикуляром OiNi опущенным из центра вращения звена Oi на нормаль п — п. Условие контакта тел будет обеспечено лишь при равенстве нормальных составляющих скоростей
![]()
что вытекает из равенства координат сопряженных (имеющих общую внешнюю нормаль) точек контакта.
П![]() оследнее
равенство с учетом зависимостей
(20.3) дает
оследнее
равенство с учетом зависимостей
(20.3) дает
Если соединить прямой центры О1 и О2 и обозначить через П точку пересечения этой прямой с нормалью п — п, то из подобия полученных треугольников O1N1П и O2N2П следует, что
![]()
(20.4)
Зависимость (20.4) выражает собой основной закон зацепления: нормаль к профилям в точке контакта делит расстояние между центрами (межцентровое расстояние) на отрезки, обратно пропорциональные угловым скоростям звеньев. Существенно, что при постоянном передаточном отношении (i12 = const) и зафиксированных центрах О1 и О2 точка П будет занимать на линии центров неизменное положение. Отсюда или из равенства (20.4) следует, что для обеспечения постоянства передаточного отношения в процессе зацепления профили звеньев должны быть подобраны так, чтобы в любом положении профилей нормаль в точке их контакта пересекала бы линию центров в одной и той же точке П. Эта точка, таким образом, оказывается неподвижной в пространстве и называется ПОЛЮСОМ.
Теоретически один из профилей зубьев может быть выбран произвольно, но для обеспечения условия i12 = const форма профиля второго зуба должна быть вполне определенной. Профили зубьев, зацепление которых обеспечивает постоянное передаточное отношение, называют сопряженными.
Для реальных передач важно использовать профили наиболее технологичные и рациональные при изготовлении и в эксплуатации.
Одним из таких профилей является эвольеентный профиль, широко применяемый при изготовлении зубчатых колес.
Преимуществом эвольвентного зацепления, впервые предложенного Л. Эйлером, по сравнению с зацеплениями других видов (например, циклоидальным) является высокая технологичность:
а) эвольвентный профиль легче изготовить с высокой точностью, так как эвольвентные зубья могут быть обработаны инструментом с прямолинейной режущей кромкой;
б) эвольвентные профили нечувствительны к отклонениям межцентрового расстояния и поэтому не изменяют закона движения и передаточного отношения передачи.
Используют и другие виды зацеплений (циклоидальное, цевочное, часовое и т. д.). Среди «неэвольвентных» зацеплений наибольшее распространение получило зацепление Новикова (см. с. 337), характеризуемое высокой прочностью зубьев.
§ 4. ЭВОЛЬВЕНТНОЕ ЗАЦЕПЛЕНИЕ Основные сведения. Эвольвентой (от латинского слова evolvens) называют плоскую кривую, являющуюся разверткой другой плоской кривой, называемой эволютой. Для образования зубьев колес в качестве эволюты используют окружность, называемую основной (db — диаметр основной окружности). Эвольвенту этой окружности будет описывать любая точка прямой линии (производящей прямой), перекатываемой по ней без скольжения (рис. 20.6). Предельная точка М эвольвенты лежит на основной окружности. Используя известные из дифференциальной геометрии соотношения для определения
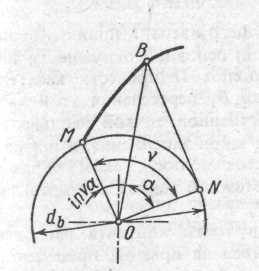
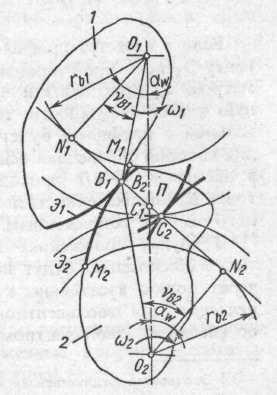
Рис. 20.6. К образованию эвольвентного профиля
Р ис.
20.7. Сопряженные профили
ис.
20.7. Сопряженные профили