

§ 4. Особенности расчета групповых (многоболтовых) соединений
Расчет групповых болтовых соединений сводится к определению наиболее нагруженного болта и оценке его прочности.
При действии осевой растягивающей силы (соединения сосудов и т. п., рис. 32.17) полагают, что эта сила равномерно распределяется между болтами. Нагрузка на один болт (n — число болтов)
![]()
Диаметр резьбы болта определяют затем по формуле (32,12).
При совместном действии растягивающей силы и изгибающего момента(рис. 32.18, я)
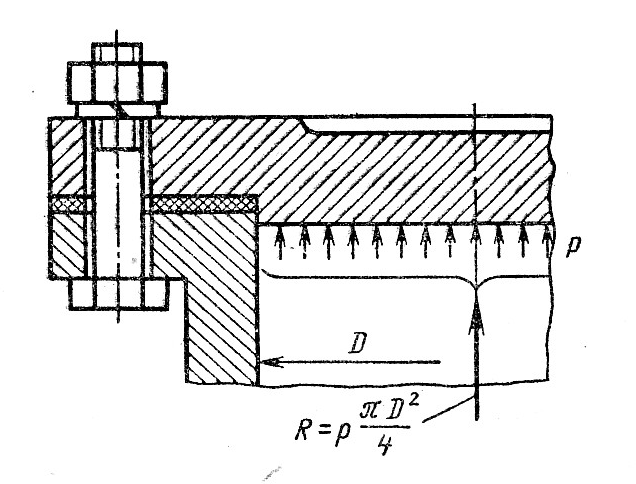
Рис. 32.17. Схема к расчету группового соединения при действия осевой силы
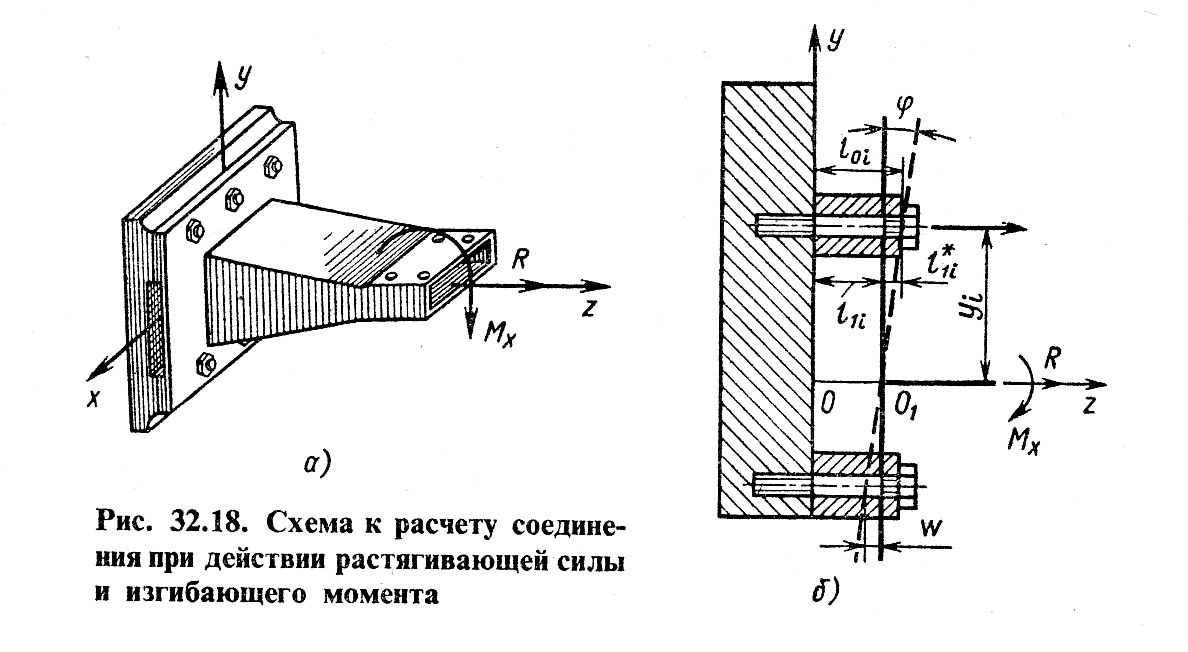
нагрузка распределяется между болтовыми соединениями неравномерно. Определение наибольшей нагрузки на болт производят, схематизируя соединение в виде группы одиночных соединений (по числу болтов), связанных между собой абсолютно жесткой (недеформируемой) диафрагмой в форме реальной корпусной детали (рис. 32.18, б). Это равносильно обычному допущению, что при нагружении соединения деформируются только болты и часть объема материала детали вблизи болта, и поворот детали при нагружении происходит вокруг оси, проходящей через центр тяжести сечений болтов.
Предположим, что
для i-ro
болта (винта, шпильки) с площадью
поперечного сечения
![]() и длиной
и длиной
![]() эквивалентная по
жесткости втулка имеет площадь
эквивалентная по
жесткости втулка имеет площадь![]() и
длину
и
длину![]() ;
(диафрагма присоединена к наружной
поверхности детали).
;
(диафрагма присоединена к наружной
поверхности детали).
Если перемещение
диафрагмы вдоль оси болта
![]() то усилие
то усилие
![]() с которым диафрагма
действует на i-e
соединение :
с которым диафрагма
действует на i-e
соединение :
![]() (32.19)
(32.19)
где
![]() - податливость i-го
соединения.
- податливость i-го
соединения.
Величина
![]() легко определяется,
если принять, что часть силы Fi,
равная Fiб,
идет на деформацию
болта (растяжение), а другая часть Fiд
— на растяжение
втулки. Тогда
легко определяется,
если принять, что часть силы Fi,
равная Fiб,
идет на деформацию
болта (растяжение), а другая часть Fiд
— на растяжение
втулки. Тогда
![]()
![]()
С учетом этих равенств
![]()
откуда
![]() (32.20)
(32.20)
Перемещения точек диафрагмы можно записать в форме
![]() (32.21)
(32.21)
и усилие на г-е соединение
![]() (51.11)
(51.11)
где w0 — смещение точки О1 (совпадающей с центром тяжести сечений болтов) диафрагмы в направлении оси z от растягивающей силы; φ — угол поворота плоскости диафрагмы от изгибающего момента.
Так как усилия Fi возникают в болтах от действия силы R и момента Мх, то
![]() ;
;![]()
Внося в эти равенства зависимость (32.22), получим
![]()
![]()
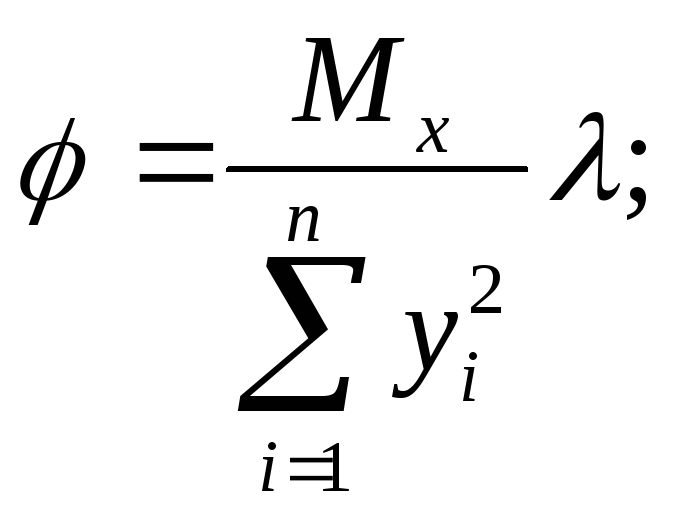
Из этих уравнений можно определить параметры w0 и φ. Эти зависимости упрощаются, если λoi = λ0 = const и λ1i = λ 1 = const. Тогда λi = λ = const и для осей, помещенных в центре тяжести сечений стержней болтов:
![]()
откуда вытекает
![]()
Подставив эти соотношения в уравнение (32.21), получим
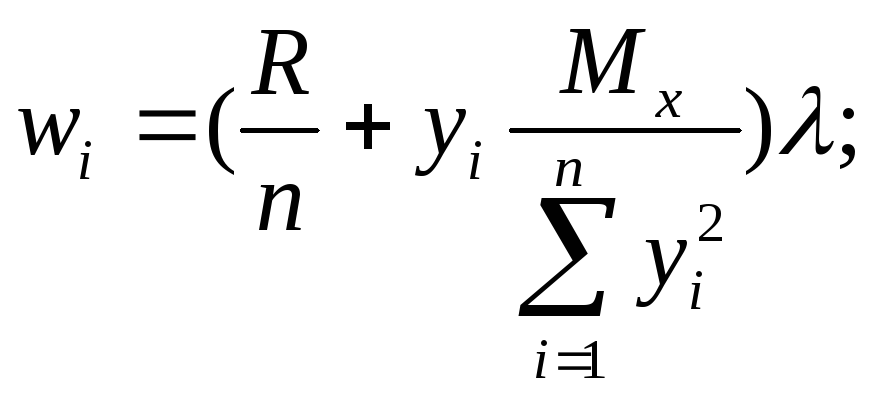
откуда усилие на болт
Очевидно, что наибольшее усилие будет воспринимать болт с yi = уmах. Учитывая равенства (32.7) и (32.20), будем иметь
 (32-23)
(32-23)
где χ— коэффициент основной нагрузки одиночного соединения (см. с. 512).
В упрощенном расчете соединения можно принять χ = = 0,2 /0,25 и, задавшись числом болтов и значениями уi, найти по внешней нагрузке величину F6max- Диаметр болта затем находят по формуле (32.12).
Пример. Рассчитать болты фланцевой муфты (рис. 32.19), передающей мощность P1 = 50 кВт при частоте вращения n1 = 250 об/мин;диаметр окружности осей болтов Do = 220 мм. Расчет произвести для двух вариантов: а) болты установлены без зазора; б) болты установлены с зазором, коэффициент трения между торцами полумуфт f= 0,15.
Решение. 1. Определяем передаваемый вращающий момент
![]()
 Рис.32,19.
Муфта
Рис.32,19.
Муфта
2. Назначаем число болтов в соединении п = 6 и находим окружное усилие, передаваемое одним болтом:
![]()
3. По формуле (32.13) определяем диаметр стержня болта, установленного без зазора. Принимаем материал болтов — сталь 45, σТ = 470 МПа, [τс] = О,3σт = 0,3 • 470 = 141 МПа,
![]()
Принимаем болт с резьбой М5, имеющий диаметр стержня 5,2 мм.
4. По формуле (32.17) находим внутренний диаметр резьбы болта, установленного с зазором. Допускаемое напряжение [σр] = 0,Зσт = = 0,3 * 470 = 141 МПа (см. табл. 32.1),
![]()
Из табл. 32.4 находим, что условию задачи удовлетворяет болт с резьбой М16(d1 = 13,546 мм при dc = 15 / 16 мм).
Видно, что при установке в муфту болтов без зазора диаметр их стержня оказывается почти в 3 раза меньшим, чем при установке болтов с зазором.
Однако сложность реализации на практике беззазорной посадки вынуждает использовать менее целесообразный вариант установки болтов с зазором. В последнем случае часто предусматривают защиту болтов от возможного сдвига с помощью штифтов, шпонок и т. п.