

2.2 Детали для гибки
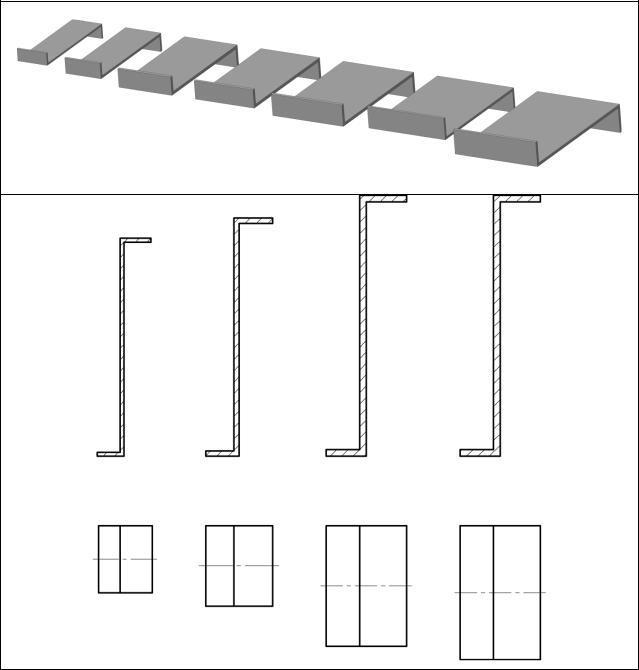
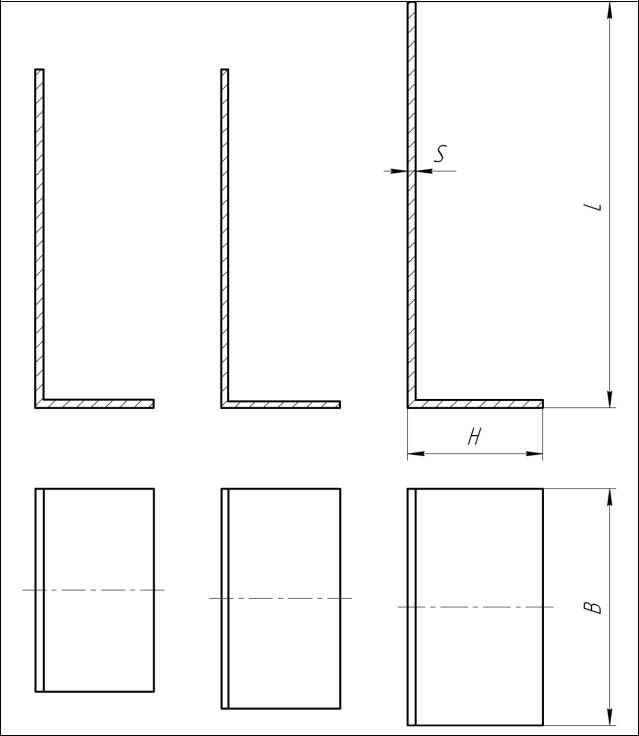
1. Двойной уголок
Таблица 2.7 – Характеристики детали двойной уголок
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
B, мм |
25 |
30 |
45 |
50 |
60 |
65 |
70 |
H, мм |
20 |
25 |
30 |
30 |
35 |
35 |
40 |
S, мм |
1,5 |
2,0 |
2,5 |
2,5 |
2,5 |
2,0 |
2,4 |
L, мм |
80 |
87 |
95 |
95 |
102,5 |
100 |
120 |
Материал |
Ст20 |
Ст20 |
Ст20 |
Ст20 |
Л63 |
Ст20 |
АМг2 |
Масса, г |
29,4 |
52,8 |
110,5 |
122,8 |
181,5 |
137,9 |
72 |
23
24
25
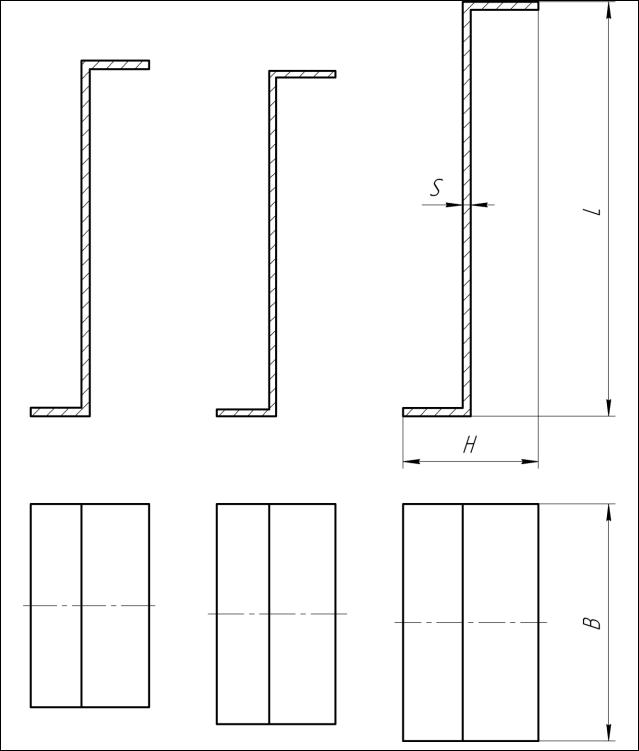
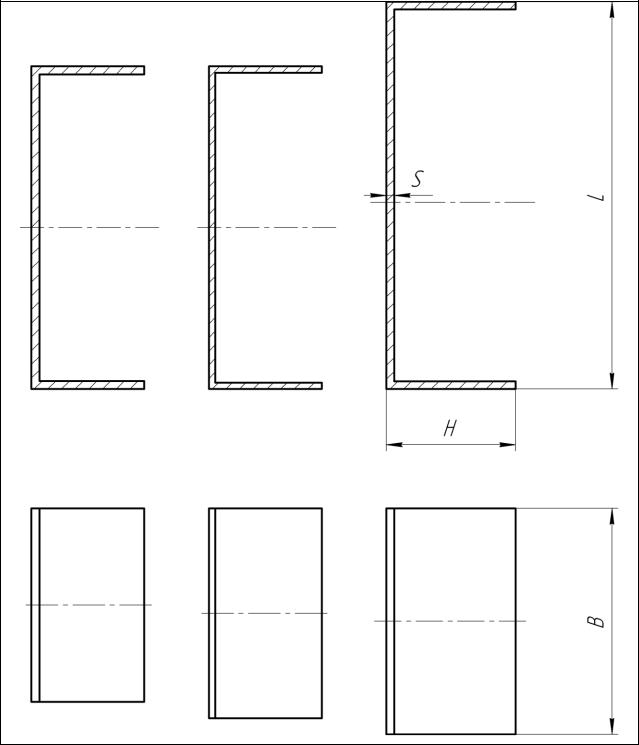
2. Скоба
Таблица 2.8 – Характеристики детали скоба
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
B, мм |
25 |
30 |
45 |
50 |
60 |
65 |
70 |
H, мм |
20 |
25 |
30 |
30 |
35 |
35 |
40 |
S, мм |
1,5 |
2,0 |
2,5 |
2,5 |
2,5 |
2,0 |
2,4 |
L, мм |
80 |
85 |
95 |
95 |
100 |
100 |
120 |
Материал |
Ст20 |
Ст20 |
Ст20 |
Ст20 |
Л63 |
Ст20 |
АМг2 |
Масса, г |
34,5 |
61,7 |
132,6 |
147,4 |
217,8 |
169,6 |
87,8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
26
27
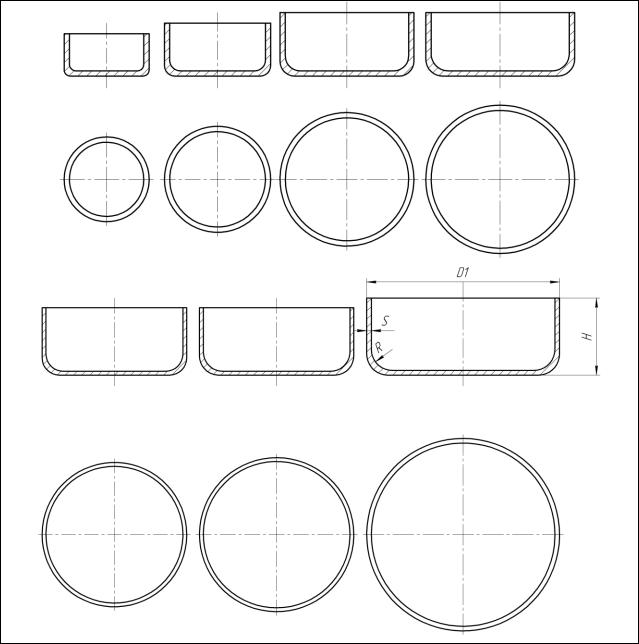
3. Скоба с фланцем
Таблица 2.9 – Характеристики детали скоба с фланцем
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
B, мм |
25 |
30 |
45 |
50 |
60 |
65 |
70 |
H, мм |
20 |
25 |
30 |
30 |
35 |
35 |
40 |
S, мм |
1,5 |
2,0 |
2,5 |
2,5 |
2,5 |
2,0 |
2,4 |
L, мм |
61,5 |
69 |
79,5 |
82,5 |
82,5 |
82 |
102 |
Материал |
Ст20 |
Ст20 |
Ст20 |
Ст20 |
Л63 |
Ст20 |
АМг2 |
Масса, г |
29,4 |
55,1 |
121,1 |
137,5 |
198 |
153,2 |
80,8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
28
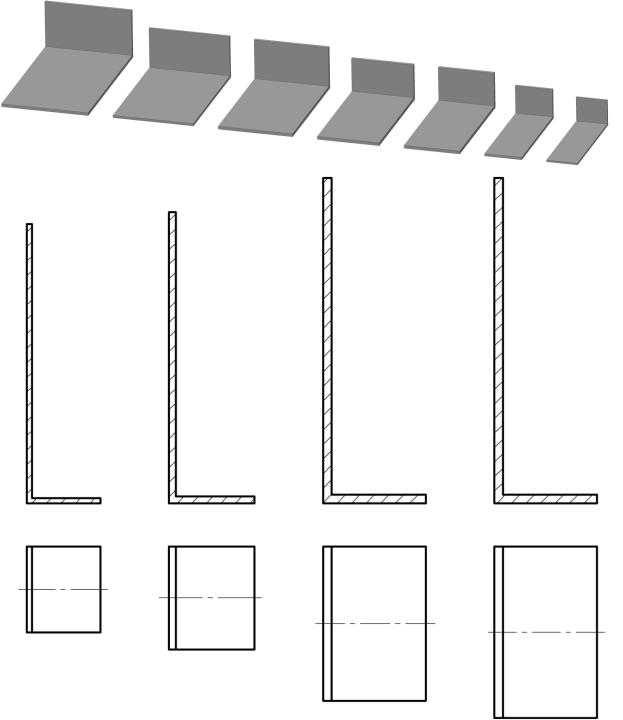
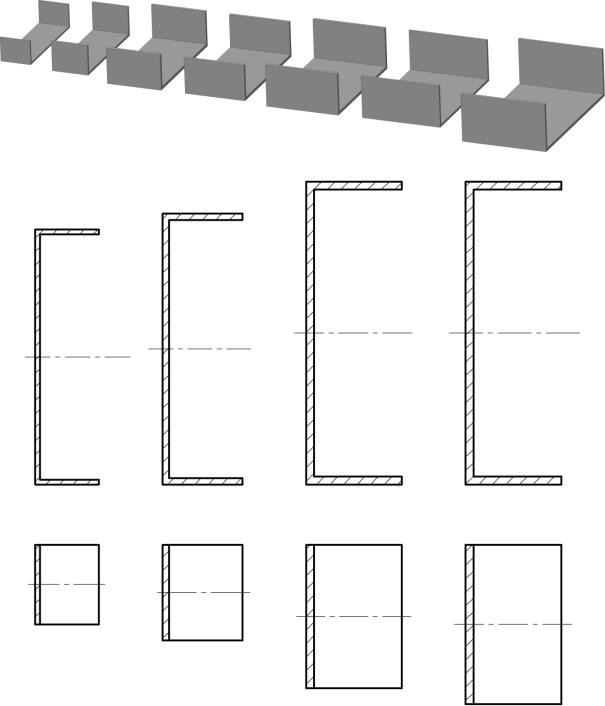
4. Уголок
Таблица 2.10 – Характеристики детали уголок
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
B, мм |
25 |
30 |
45 |
50 |
60 |
65 |
70 |
H, мм |
20 |
25 |
30 |
30 |
35 |
35 |
40 |
S, мм |
1,5 |
2,0 |
2,5 |
2,5 |
2,5 |
2,0 |
2,4 |
L, мм |
80 |
85 |
95 |
95 |
100 |
100 |
120 |
Материал |
Ст20 |
Ст20 |
Ст20 |
Ст20 |
Л63 |
Ст20 |
АМг2 |
Масса, г |
29 |
50,9 |
108,3 |
120,3 |
174,9 |
135,8 |
70,9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
29
30
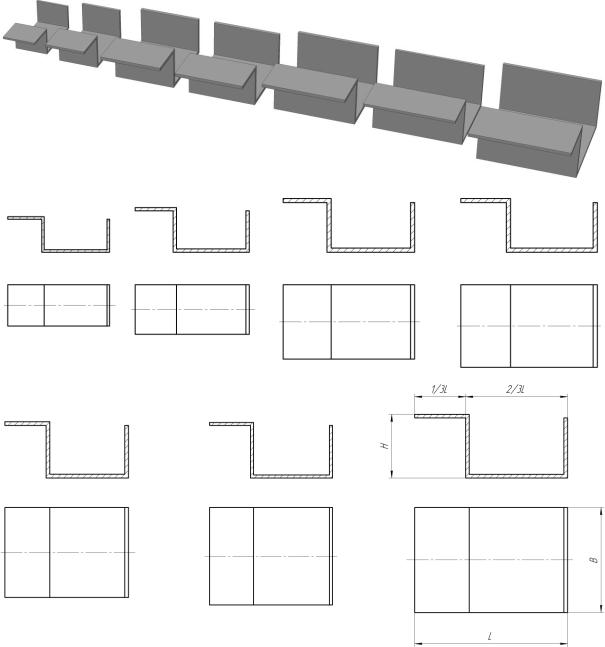
5. Скоба с фланцами
Таблица 2.11 – Характеристики детали скоба с фланцами
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
B, мм |
25 |
30 |
45 |
50 |
60 |
65 |
70 |
H, мм |
20 |
25 |
30 |
30 |
35 |
35 |
40 |
S, мм |
1,5 |
2,0 |
2,5 |
2,5 |
2,5 |
2,0 |
2,4 |
L, мм |
80 |
84 |
94 |
100 |
100 |
100 |
120 |
Материал |
Ст20 |
Ст20 |
Ст20 |
Ст20 |
Л63 |
Ст20 |
АМг2 |
Масса, г |
35,3 |
63,2 |
136,2 |
157,2 |
224,4 |
173,7 |
90,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
31