

Например, «Гном» – робот модульного типа нашел применение для листовой штамповки (грузоподъемность 0.1–0.5 кг). Он имеет пневмосистему модульного типа, пневмопривод, блок подготовки воздуха, электронную систему управления по модульному типу (отрабатывает до 24 шагов). Манипулятор «Гнома» может монтироваться на оборудование и состоит из линейных вращательных модулей.
РТК, который будет построен по модульному принципу, можно скомпоновать из отдельных технологических ячеек в целую автоматическую линию. Создание на основе модулей типовых моделей роботов и отдельных комплексов является основным направлением успешного решения комплексной автоматизации, которое обеспечивает производительность и гибкость при мелкосерийном производстве.
Под специальную задачу можно применить и специальный робот. Однако доработок избежать нельзя и робот, который был универсальным, становится специальным, приспособленным только для данного оборудования. Это уже ограничение гибкости производства.
Применение модульных роботов облегчает их приспособление к прессу. Взаимная ориентация робота и пресса: установка вспомогательного оборудования, изменение маршрута манипуляции, совершенствование пресса, правильная расстановка оборудования. Если в комплексе несколько роботов нужно применять один вид ПР. В таком случае, достаточно двух точек позиционирования и цикловой системы управления. Однако возникает дополнительная сложность в случае, когда робот работает на два пресса. Для этого устанавливают робот– перекладчик и возникают задачи с переориентацией заготовки. Для обеспечения адаптивности робота необходимо использовать системы сенсорного типа– средства технического зрения и т.д. Кроме этого важны данные о проведении монтажа, наладки и регулировки.
7.3Номенклатура промышленных роботов
7.3.1Напольные роботы с горизонтальной выдвижной рукой и консольным механизмом
подъема
Роботы этой группы в настоящее время составляют основную часть выпущенных машин, как по числу моделей, так и по общему количеству. Наибольшее применение роботы этого типа нашли для обслуживания холодно – штамповочных прессов.
Консольный механизм подъема, как правило, не может обеспечить больших вертикальных перемещений, поэтому большинство ПР рассматриваемой группы представляют собой специализированные машины, приспособленные для выполнения простых транспортно– загрузочных операций. Как правило, они отличаются большим быстродействием и имеют пневматический привод (при малой грузоподъемности), цикловые системы управления, а перемещения их узлов ограничиваются упорами. Обычно роботы снабжаются несколькими руками. Поскольку руки устанавливаются на общем несущем элементе и совершают основные движения одновременно, число обслуживаемых позиций получается на единицу больше, чем число рук. ПР с одной рукой применяют в случае, если пресс имеет автоматическое загрузочное или разгрузочное приспособление (работа из рулона, проталкивание детали под стол пресса и т.
п.).
Обычно применяются ПР с выдвижными руками, однако на открытых прессах часть операций, выполняемых на штампах с задним расположением колонок, может быть автоматизирована с помощью роботов, имеющих руки постоянной длины. Такое решение характерно при обработке деталей небольшого размера. В этом случае ПР и питатели устанавливаются на кронштейнах, закрепленных на станине пресса.
К этой группе относятся ПР модели «Циклон–3.01» (СССР). Эта быстроходная пневматическая машина (Рисунок 7.11) предназначена главным образом для загрузки листоштамповочных прессов. Точки останова узлов определяются регулируемыми упорами. При подходе к упорам скорость гасится гидравлическими амортизаторами. Высокий темп работы ПР этого типа обусловил необходимость введения в систему управления контроля по времени. Это позволило обойтись без путевых выключателей, контролирующих конечные положения узлов. Программа работы набирается на коммутационной панели, имеющей ряд гнезд, которые последовательно через определенные интервалы времени (например, 0,1 с) «опрашиваются» электронным
64
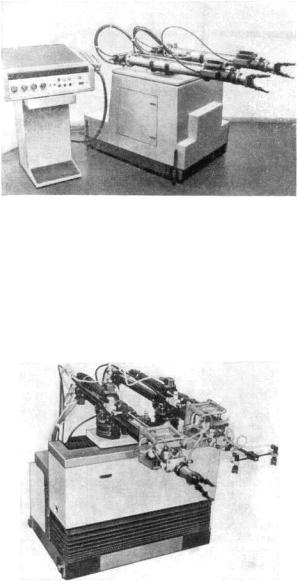
коммутатором. Любое гнездо может быть соединено с соответствующим контактом, дающим команду на пуск нужного привода. Предусмотрены также команды от внешнего оборудования, требующие ответа и останавливающие коммутатор до поступления ответного сигнала. Имеются аналогичные системы управления, выполненные на основе пневмоавтоматики.
Рисунок 7.11 – Промышленный робот модели «Циклон–3.01» (СССР)
Безаварийность работы ПР обеспечивается датчиками внешней информации, которые исключают возможность попадания в штамп двух заготовок и срабатывания пресса при неправильной укладке заготовки в штамп. Работа пресса блокируется также в том случае, если обработанная деталь остается в штампе, а перемещение робота блокируется в случае, если ползун пресса не находится в верхнем положении.
Вместо поворота рук относительно вертикальной оси иногда используется их поперечное перемещение. Примером может служить ПР модели «Ритм–05. 01» (СССР) (Рисунок 7.12).
Рисунок 7.12 – Промышленный робот модели «Ритм–05.01» (СССР)
Фирма «Электролюкс» (Electrolux, Швеция) выпускает две группы агрегатированных машин, относящихся к этому классу,– «MHU Senior» и «MHU Junior» грузоподъемностью 10 и 3 кг соответственно. ПР модели «MHU Senior» стандартного исполнения (Рисунок 7.13) действует в цилиндрической системе координат. Рука для уменьшения размеров робота выполнена телескопической и состоит из двух труб квадратного сечения, движущихся по роликам. Перемещение руки осуществляется тремя пневмоцилиндрами, установленными последовательно. Различные комбинации включения цилиндров позволяют останавливать руку в шести различных положениях. Механизм поворота имеет привод от пневмомотора и обеспечивает поворот руки на любой угол с остановкой по упорам. Механизм подъема также выполнен на основе трубы квадратного сечения и пневмоцилиндра. Система жестких упоров с торможением за счет гидродемпферов обеспечивает высокую точность позиционирования. Основная область применения указанных ПР– разгрузка литейных машин, загрузка станков и другого оборудования. В отличие от описанной модели модель «MHU Junior» может быть оснащена несколькими выдвижными руками (до трех), которые не имеют возможности останавливаться в промежуточных точках.
65

Рисунок 7.13 – Промышленный робот модели «MHU Senior» (Швеция)
Оригинальный механизм подъема в виде четырехзвенного пантографа имеет робот модели «Универсал–5» (Рисунок 7.13). Рычажный механизм выполняет функции повышающей передачи и направляющих, обеспечивая при небольших размерах по высоте значительные перемещения (800 мм). Привод робота смешанный: электромеханический на основных перемещениях, пневматический на вспомогательных.
Рисунок 7.14 – Промышленный робот модели «Универсал–5» (СССР)
ПР модели 110А (СССР) предназначен для автоматизации сварки в электрической дуге (Рисунок 7.15). Робот действует в прямоугольной системе координат, имеет электромеханический шаговый привод. Привод вертикального перемещения разгружен пневмоцилиндром, играющим роль противовеса.
66
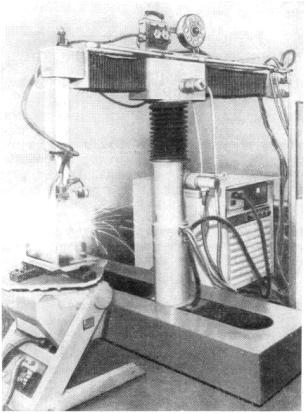
Рисунок 7.15 – Промышленный робот модели 110А (СССР)
Номенклатура напольных роботов с горизонтальной выдвижной рукой представлена в приложении 2.
7.3.2 Малогабаритные
Малогабаритные роботы используют для работы с небольшими деталями и изделиями на разнообразных операциях – загрузке станков, прессов и другого оборудования, а также для автоматизации сборки. Характерной особенностью таких роботов является настольное исполнение и размещение непосредственно на обслуживаемом оборудовании или встройка в него. Такие роботы часто выполняются на базе гаммы узлов, из которых компонуются различные виды механических рук и вспомогательных устройств.
По такому принципу выполнены, например, роботы фирмы «Фелсс» (Felss, ФРГ), которая выпускает ряд устройств для линейного перемещения и поворота, а также подъемно–поворотные механизмы и широкую гамму захватных устройств. Основой конструкции робота модели FL–0 этой фирмы является подъемно–поворотный механизм, на котором могут быть закреплены несколько жестких рук. ПР построен по агрегатному принципу, для него разработана широкая номенклатура держателей с различными захватами (магнитными, вакуумными и механическими). Руки выполняются одинарными или двойными с механизмом вращения захвата. Существуют также модификации рук, имеющих осевое перемещение. Перемещение рук легко регулируется за счет их перезакрепления. Привод поворота робота пневматический, подъем узла, несущего руки, осуществляется кулачковым механизмом за счет дополнительного перемещения привода поворота. Такое решение обеспечивает весьма высокое быстродействие ПР.
Характерным примером роботов этой группы может служить также ПР модели «Ритм– 01.01» (СССР). Робот крепится на обслуживаемом оборудовании, имеет пневматический привод (Рисунок 7.15). Перемещения определяются настройкой упоров, для торможения в конце перемещения используются гидравлические демпферы.
Кроме упрощенных цикловых машин имеются и несколько моделей малогабаритных роботов с программным управлением, используемых в основном для автоматизации сборочных операций. К ним относится ПР модели «Pragma А3000» фирмы ДЕА (DEA, Италия), работающий в прямоугольной системе координат. Роботы этого типа устанавливаются вдоль поточной линии сборки и могут перемещаться вдоль нее на значительное расстояние (1300 мм). Универсальный
67