

15.3 Основные логические функции в пневмосхемотехнике
Сигнал должен иметь возможность переходить из состояния ЕДИНИЦА в состояние НОЛЬ. Только в этом случае он может быть использован в логике (использоваться как логический): другими словами, постоянно присутствующий воздух на входе Р распределителя не может рассматриваться как сигнал, потому что его состояние всегда равно ЕДИНИЦЕ.
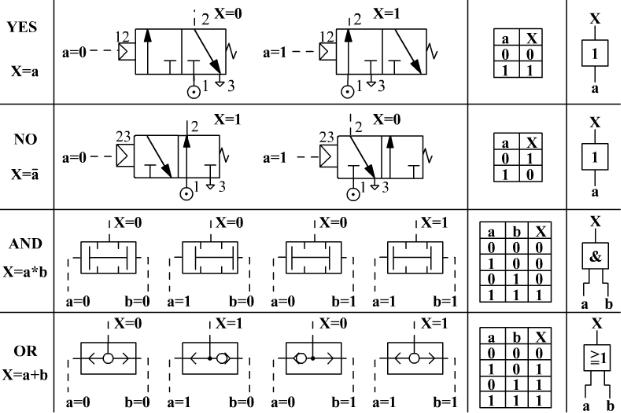
Логика использует четыре основные функции, которые реализуются использованием четырех пневматических распределителей.
Рисунок 15.4 – Основные логические функции
Функция ДА – Распределитель, реализующий эту функцию, это моностабильный 3/2 НЗ распределитель с пневматическим пилотом.
Пусть Х (зависимый сигнал), принимающий состояние НОЛЬ или ЕДИНИЦА, сигнала выхода А.
Пусть а (независимый сигнал), принимающий состояние НОЛЬ или ЕДИНИЦА, сигнала пневматического пилота (для а=0 Х=0 для а=1 Х=1).
Сигнал Х принимает значения такие же, как сигнал а. Поэтому это тождество сигналов, для которого логическое уравнение Х=а.
Данный тип распределителя управляется вручную или механически, его дополняют бистабильным или моностабильным 3/2 НО распределителем.
Функция НЕ – Распределитель, реализующий эту функцию, это моностабильный 3/2 НО распределитель с пневматическим пилотом (для а=0 Х=1 для а=1 Х=0).
Это инверсия состояний, т.е. если сигнал Х=ИСТИНА, то сигнал а=ЛОЖЬ, или наоборот. Во многих случаях удобно представлять сигнал ЛОЖЬ в форме сигнала ИСТИНА, то есть,
"инверсный" сигнал обозначается той же буквой с чертой сверху: Для а=0
Функция НЕ выполняет инверсию действий и записывается уравнением.
Данный тип распределителя управляется вручную или механически, его дополняют бистабильным или моностабильным 3/2 НО распределителем.
Функция И – это характеристика клапана двух давлений:
Зависимый сигнал Х определяется двумя независимыми сигналами, а и b (по двум отдельным пневматическим каналам), поступающих от других функций, включая другие И.
106
Присутствие двух входных сигналов, каждый из которых имеет два состояния, дает в сумме четыре комбинации. Фактически, есть четыре возможных комбинации, но состояние ЕДИНИЦА переменной Х присутствует только в одной из них.
Проанализируем каждую ситуацию: для а=0 b=0 Х=0 нет сигналов;
для а=1 b=0 Х=0 входной сигнал воздействует на небольшой поршень, перемещает его вправо, препятствуя прохождению сигнала к Х;
для а=0 b=1 Х=0 предыдущая ситуация повторяется, только наоборот;
для а=1 b=1 Х=1 если давления равны, сигнал поступивший последним, проходит через клапан. Если давления будут различны, проходит сигнал с меньшим давлением.
Анализ таблицы, называемой таблицей истинности, и результата для каждой комбинации, который представляет собой оператор арифметического умножения состояний двух переменных (а и b). Их результат в точности соответствует состоянию, принятому для переменной Х. Из таблицы истинности видно, что состояние ЕДИНИЦА для Х возможно только, когда состояние ЕДИНИЦА имеют и "а" и "b". Поэтому этот клапан в основном используется для функции контроля, где присутствие обоих входных сигналов необходимо для обеспечения выходного сигнала Х.
Функция ИЛИ – это характеристика клапана выбора (перекидной клапан):
ситуация при наличии двух входных сигналов, такая же как для предыдущей функции И. Рассмотрим это отдельно:
для а=0 b=0 X=0 нет сигналов;
для a=1 b=0 X=1 входной сигнал закрывает проход для b и проходит к X; для a=0 b=1 X=1 противоположный эффект;
для a=1 b=1 X=1 совпадение двух входных сигналов не изменяет состояние выхода ЕДИНИЦА.
Анализ таблицы истинности позволяет установить, что для первых трех комбинаций, состояние X соответствует точно арифметической сумме состояний a и b.
Для четвертой комбинации, 1+1=1. Поэтому, функция (или операция) ИЛИ записывается следующим способом: X=a+b.
При просмотре таблицы истинности, выясняется, что состояние ЕДИНИЦА сигнала X соответствует трем различным состояниям сигналов a и b. В двух из них, сигнал имеет состояние НОЛЬ.
По этой причине клапан ИЛИ используется в тех случаях, когда управление должно быть получено от двух различных положений.
15.4Реализация логических функций в электропневмосхемотехнике
Вэлектрическом оборудовании функции НО и НЗ выполняются контактами, к которым подключены проводники, ведущие к электрическому оборудованию, которое необходимо отключать или подключать.
Если эти контакты, до воздействия на них ручного, механического или электрического устройства обеспечивают соединение проводников, такие контакты называются НЗ (нормально замкнутыми). Если, вместо этого, в исходном положении (не включенном) они выполняют функцию переключателя, то они называются НР (нормально разомкнутыми). Понятие НЗ или НР контакта не ограничивается, например, выключателем освещения или кнопкой звонка, оно также касается контактов, которые имеются в реле и таймерах. Эти элементы, ничто иное, как электромагниты, которые воздействуют механически на некоторое число НР и/или НЗ контактов.
107
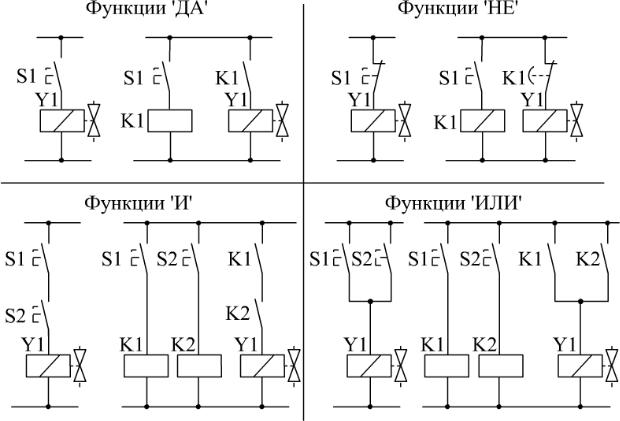
Рисунок 15.5 – Схема реализации логических функций
Вэлектрической технике управления, в отличии от пневматической техники управления (которая имеет элементы для каждой базовой логической функции), логические функции должны быть реализованы посредством соединений:
–прямые соединения, используя контакты устройств, обеспечивающих информационные сигналы;
–непрямые соединения, используя контакты реле, управляемые устройствами, обеспечивающими информационные сигналы.
Функция ДА: S1=Y1
–без реле: НР контакт информации S1 связан непосредственно с катушкой Y1.
–с реле: НР контакт заменен подобным НР контактом реле K1 и включен в цепь катушки Y1.
Вобоих случаях катушка Y1 включается при наличии информации S1, то есть когда контакт S1 (НР) и контакт K1 (НР) замыкаются.
Функция НЕ:
–без реле: НЗ контакт информации P1 непосредственно связан с катушкой Y1.
–с реле: информация S1 (с НЗ контактом) заменена НЗ контактом реле K1 и включен в цепь
Y1.
Вобоих случаях катушка Y1 включается в отсутствии информации S1, то есть когда контакт S НЗ) и K1 (НЗ) остаются замкнутыми.
Функция И: S1xS2
–без реле: НР контакты двух информационных устройств последовательно соединены друг с другом и связаны с катушкой 2.0.
–с реле: НР контакты двух информационных устройств заменены НР контактами реле K1 и K2 и соединены последовательно в цепи катушки Y1.
Вобоих случаях катушка Y1 включается только, когда есть оба информационных сигнала.
Функция ИЛИ: S1+S2
–без реле: НР контакты двух информационных устройств соединены параллельно, а общая
цепь соединена с катушкой Y1.
–с реле: НР контакты двух информационных устройств заменены НР контактами реле K1 и K2 и связаны параллельно в цепи катушки Y1.
108
В обоих случаях катушка Y2 включается при наличии информации от одного из двух информационных устройств.
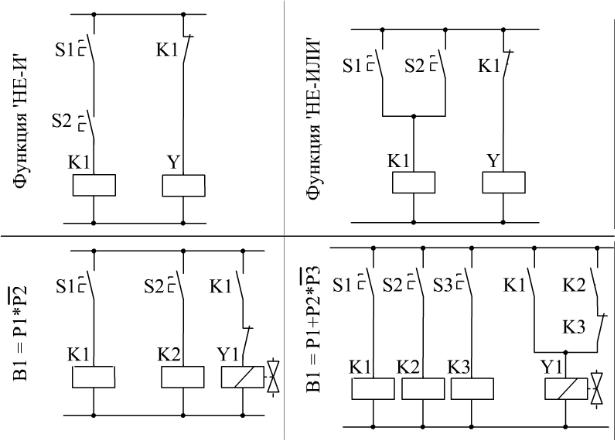
Рисунок 15.6 – Схема реализации логических функций
Функция НЕ–И: инвертированная функция И. (Ее реализация возможна только, при наличии реле).
Впервой цепи НР контакты двух информационных устройств S1 и S2 соединены последовательно и связаны с реле K1.
Во второй цепи НР контакт реле K1 соединен с катушкой Y, которая реализует функцию НЕ–И.
Когда реле K1 не включено (потому что S1 и S2 не сработали) НЗ контакт K1 остается замкнутым, и катушка Y включается. Когда реле K1 включается (потому что S1 и S2 сработали), контакт НЗ K1 размыкается и катушка Y выключается.
Функция НЕ–ИЛИ: инвертированная функция ИЛИ. (Ее реализация возможна только, при наличии реле).
Впервой цепи НР контакты двух информационных устройств S1 и S2 соединены параллельно и подключены к реле K1. Во второй цепи НЗ контакт реле K1 соединен с катушкой Y, которая реализует функцию НЕ–ИЛИ. Когда реле K1 не включено (потому что S1 и S2 не сработали) НЗ контакт реле K1 остается замкнутым и катушка Y включена. Когда реле K1 включается (потому что по крайней мере один из двух контактов S1 и S2 сработал), НЗ контакт реле K1 размыкается, и катушка Y выключается.
Конкретные примеры релейных схем и НР контактов:
1) Информационные устройства S1 и S2 могут быть заменены контактами двух реле. Катушка Y1 подключена последовательно с контактами: S1 = K1 (НР) и S2 = K2 (НЗ) Условия включения катушки Y1:
–наличие информации от S1;
–отсутствие информации от S2.
Под отсутствием информации S2 предполагается, что контакт S2 не включен.
2) Информационные устройства S1, S2 и S3 заменены контактами трех реле. Катушка Y1 подключена к двум параллельным ветвям:
109