

малогабаритный робот модели «Mit Arm» фирмы «Викарм» (Weekarm Incorporeited, США) с многозвенной рукой имеет легкую конструкцию. Он работает в сферической системе координат. Приводы робота выполнены на основе волновых передач и электродвигателей постоянного тока мощностью около 50 Вт.
Рисунок 7.15 – Промышленный робот модели «Ритм–01.01» (СССР)
Номенклатура напольных роботов с горизонтальной выдвижной рукой представлена в приложении 2.
7.4 Пример выбора промышленного робота
Проведем выбор промышленного робота на примере РТК листовой штамповки для деталей уголок, стакан и стакан с раздачей. (См. раздел 5.5)
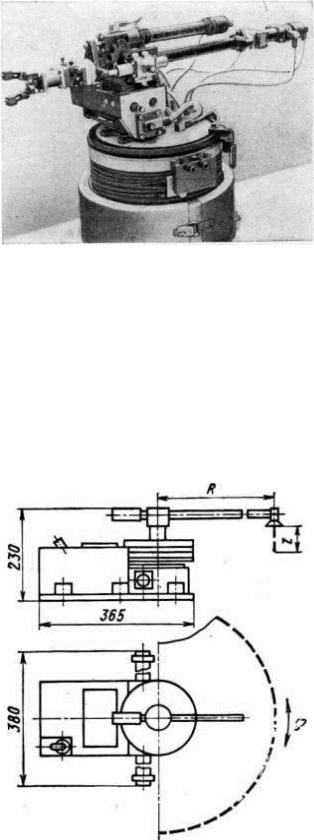
В соответствии с выбранной схемой РТК и максимальной массой заготовки\детали равной 467 грамм, был выбран промышленный робот модель КМ 0,63Ц.42.12, внешний вид и основные характеристики которого приведены ниже. Основное назначение выбранного робота – это обслуживание однокривошипных прессов открытых простого действия усилием до 100 кН
Рисунок 7.16 – Промышленный робот КМ 0,63Ц.42.12
68

Таблица 7.3 – Основные характеристики промышленного робота
Номинальная грузоподъемность, кг |
0,63 |
|
Число степеней подвижности |
2 |
|
Число рук/захватов на руку |
1/1 |
|
Тип привода |
|
Пневматический |
Устройство управления |
Цикловое |
|
Число программируемых координат |
2 |
|
Способ программирования перемещений |
По упорам |
|
|
|
|
Погрешность позиционирования, мм |
±0,1 |
|
Максимальный радиус зоны обслуживания R, мм |
350 |
|
|
|
|
Масса, кг |
|
20 |
Линейное перемещение z, мм |
20 |
|
Угловое перемещение |
|
180 |
|
||
69