

наименьший ход ползуна; |
H |
п.пл |
|
|
высоты пресса за счет шатуна.
– высота подштамповой плиты;
Ш
– регулировка закрытой
6.2 Типовые конструкции штампов
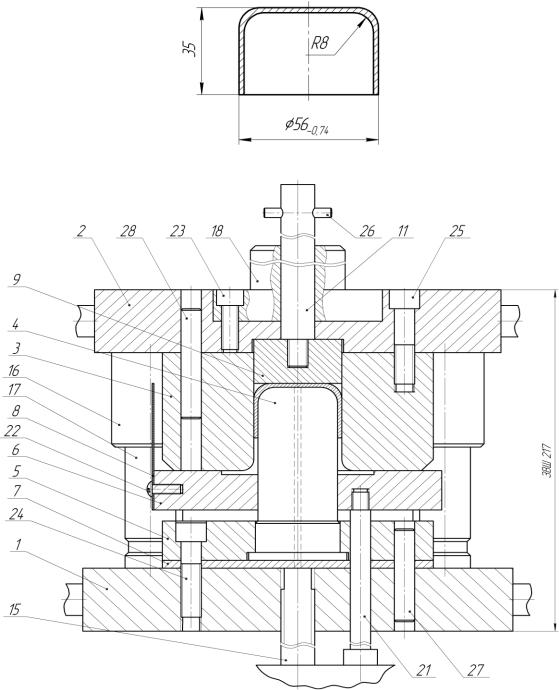
6.2.1 Штамп вытяжной
Далее приведен пример исполнения штампа для вытяжки.
Рисунок 6.1 – Деталь
Рисунок 6.2 – Сборочный чертеж штампа в закрытом положении:
1 – плита нижняя; 2 – плита верхняя; 3 – матрица; 4 – пуансон; 5 – пуансонодержатель; 6 – прижим; 7 – плита подкладная; 8 – ограждение; 9 – выталкиватель; 15 – буфер; 16 – втулка; 17 – колонка; 18 – хвостовик; 19 – штырь; 21 – 24 – винт; 25 – 27 – штифт.
47
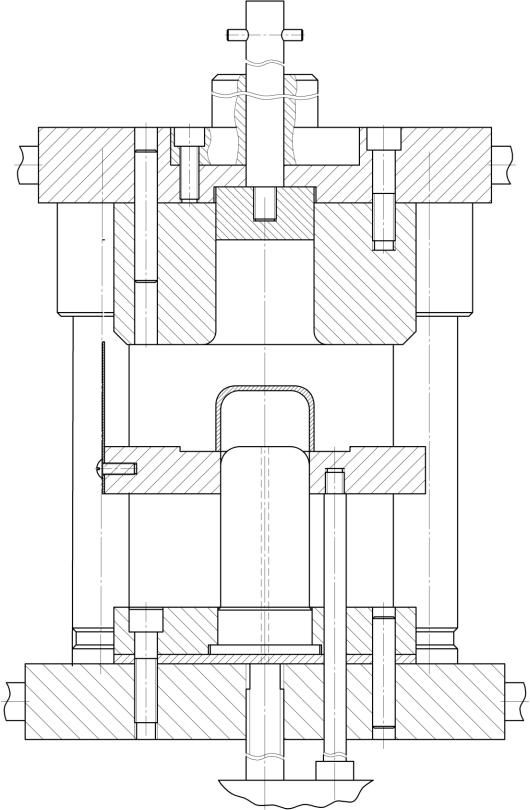
Рисунок 6.3 – Сборочный чертеж штампа в открытом положении
48
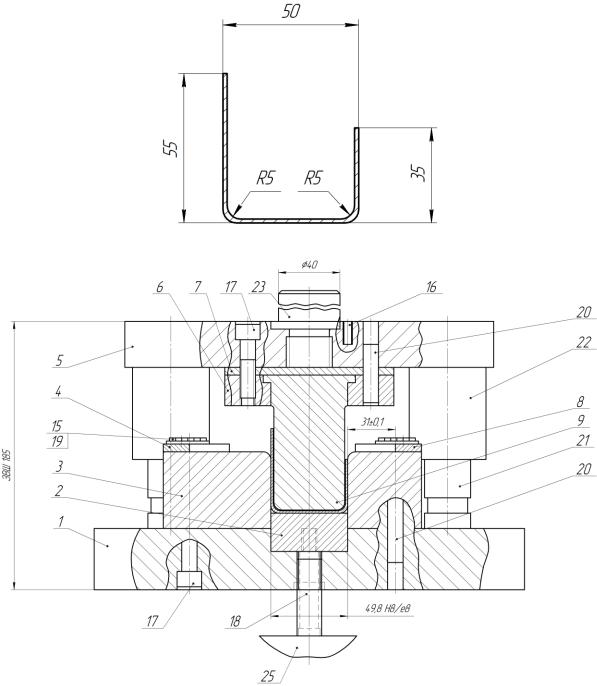
6.2.2 Штамп гибочный
Далее приведен пример исполнения штампа для гибки.
Рисунок 6.4 – Деталь
Рисунок 6.5 – Сборочный чертеж штампа в закрытом положении:
1 – плита нижняя; 2 – выталкиватель; 3 – матрица; 4 – планка; 5 – плита верхняя; 6 – пуансонодержатель; 7 – прокладка; 8 – планка; 9 – пуансон; 15 – болт; 16 – 18 – винт; 19 – шайба; 20 – штифт; 21 – колонка; 22 – втулка; 23 – хвостовик; 24 – штырь; 25 – буфер.
49
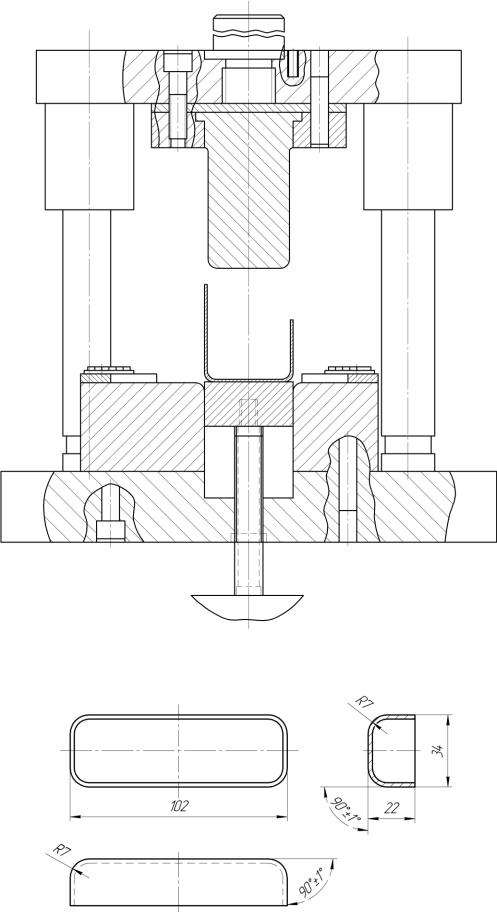
Рисунок 6.6 – Сборочный чертеж штампа в открытом положении Далее приведен пример исполнения штампа для гибки коробки.
Рисунок 6.7 – Деталь
50
Рисунок 6.8 – Сборочный чертеж штампа в закрытом положении:
1 – матрица; 2 – пуансон; 3 – выталкиватель; 4 – подкладная плита; 5 – пуансонодержатель; 6 – прижим; 7 – плита верхняя; 8, 15 – винт; 9 – втулка; 10 – колонки; 11 – плита нижняя; 12 – хвостовик; 13 – шток; 14, 16 – штифт.
51