

9.4Электромагнитные схваты
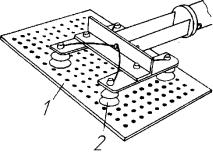
Усхватов, работающих с помощью электромагнитов, область применения аналогична с вакуумными схватами. Преимуществом электромагнитных схватов является большая сила притяжения на единицу площади, быстрота срабатывания и простота конструкции. К их недостаткам следует отнести возможность использования схватов только для работы с деталями из магнитных материалов и наличие остаточного магнетизма на перемещаемых деталях. Менее удобны схваты с постоянным магнитом (Рисунок 9.8), так как в этом случае снятие детали должно производиться с помощью приспособления.
Рисунок 9.8 – Схват электромагнитный с четырьмя магнитами:
1 – деталь; 2 – магнит.
9.5Схваты с сенсорными датчиками
В некоторых случаях необходимо, чтобы робот наряду с выполнением основных функций выдавал разного рода информацию. Например, об исправности работы оборудования в момент установки и обработки детали, а также о соблюдении заданных параметров в процессе обработки и т. д. Роль контрольных органов могут исполнять специальные датчики, выдающие сигналы о всевозможных отклонениях от заданного режима или об изменении условий обработки или внешней среды. В ряде случаев, когда требуется информация о взятии и установке детали, об усилии сжимания, температуре, скорости перемещения детали или о положении схвата относительно детали и т. д., используются сенсорные датчики, которые устанавливаются непосредственно на схватах.
9.6 Пример выбора захватного устройства промышленного робота
Проведем выбор захватного устройства промышленного робота на примере РТК листовой штамповки для деталей уголок, стакан и стакан с раздачей. (См. раздел 5.5)
В связи с особенностями заготовки и детали будем применять электромагнитный захватный орган. Достоинства электромагнитных схватов – это быстрый захват заготовок и деталей достигаемый путем прикосновения с ними или же с некоторого расстояния. Состояние внешней среды, например наличие воды, масла и т.д., не влияет на работоспособность электромагнитных схватов. Использование свойств магнетизма при захвате ферромагнитных заготовок позволяет поднимать и перемещать предметы любой формы при условии, что поверхность соприкосновения заготовок с активной частью постоянного магнита или электромагнита пропорциональна силе притяжения данного магнита.
85
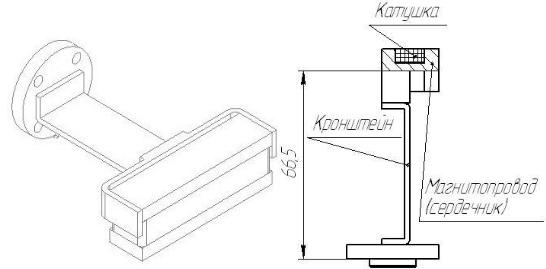
Рисунок 8.6 – Электромагнитный захватный орган
86