

Приложение 1 Номенклатура прессов.
Прессы однокривошипные открытые простого действия предназначены для выполнения различных операций холодной штамповки листового металла в крупносерийном и массовом производстве.
Далее приведены прессы наклоняемые и ненаклоняемые.
Прессы наклоняемые позволяют использовать наклон станины для съема штампуемых изделий или удаления отходов под их собственным весом.
Конструкция наклоняемых и ненаклоняемыг прессов с неподвижным столом предусматривает возможность установки механизмов автоматической подачи металла и пневматических подушек, а также встраивать их в автоматизированные поточные линии.
Прессы рассчитаны на работу в следующих режимах:
одиночный ход (двурукое синхронное управление кнопками или от педали);
непрерывные ходы (двурукое синхронное управление кнопками);
толчек (двурукое синхронное управление кнопками);
ручной поворот (при отключенном электродвигателе главного привода и остановке маховика).
Прессы оснащены:
ломким предохранителем в ползуне;
расклинивающим устройством;
выталкивателем в ползуне;
централизованной системой смазки.
Для привода рабочих органов пресса используется:
очищенный сжатый воздух давлением не менее 0,5 МПа;
переменный трехфазный ток напряжением 380 В, частотой 50 Гц.
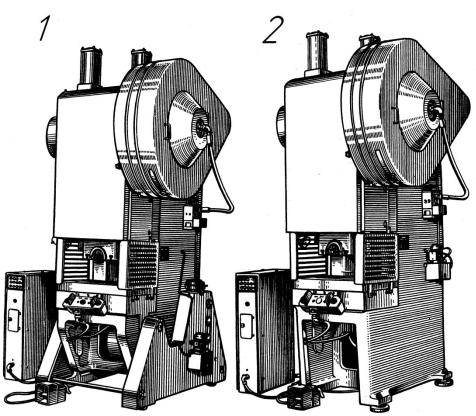
Рисунок 1 – Общий вид прессов:
1 – наклоняемого; 2 – ненаклоняемого.
112
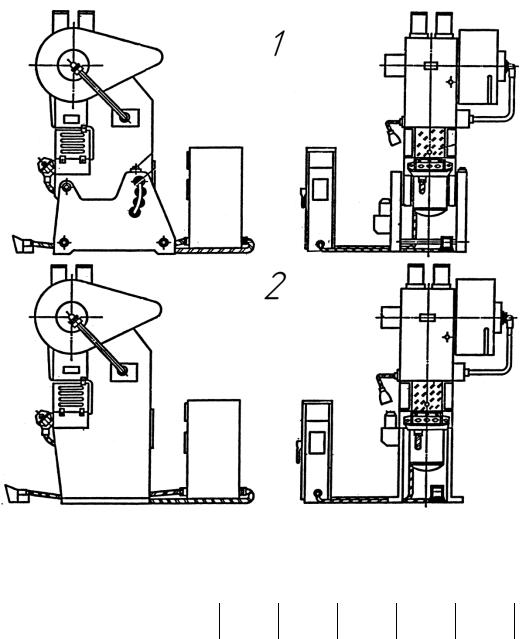
Рисунок 2 – Общий вид прессов:
1 – наклоняемого; 2 – ненаклоняемого.
Таблица 1 – Основные технические данные
|
КД2120ЕКД2322ЕКД2122ЕКД2324ЕКД2124ЕКД1424ЕКД2326Е |
|||||||
Номинальное усилие пресса, тс |
10 |
16 |
16 |
25 |
25 |
25 |
40 |
|
Ход ползуна, мм: |
|
|
|
|
|
|
|
|
наименьший |
5 |
5 |
5 |
5 |
5 |
5 |
10 |
|
наибольший |
50 |
55 |
55 |
65 |
65 |
65 |
80 |
|
Число ходов ползуна в минуту |
180 |
160 |
160 |
160 |
160 |
160 |
140 |
|
Размеры стола, мм: |
|
|
|
|
|
|
|
|
слева–направо |
360 |
420 |
420 |
500 |
500 |
500 |
600 |
|
спереди–назад |
240 |
280 |
280 |
340 |
340 |
340 |
400 |
|
Размеры отверстия в столе, мм: |
|
|
|
|
|
|
|
|
слева–направо |
180 |
210 |
210 |
250 |
250 |
250 |
300 |
|
спреди–назад |
115 |
140 |
140 |
170 |
170 |
170 |
200 |
|
диаметр |
150 |
180 |
180 |
210 |
210 |
210 |
250 |
|
Расстояние от оси ползуна до |
130 |
160 |
160 |
190 |
190 |
190 |
220 |
|
станины (вылет), мм |
||||||||
|
|
|
|
|
|
|
||
Наибольшее расстояние между |
|
|
|
|
|
|
|
|
столом и ползуном в его нижнем |
|
|
|
|
|
|
|
|
положении при наибольшем |
|
|
|
|
|
|
|
|
ходе, мм: |
|
|
|
|
|
|
|
|
при верхнем положении стола |
200 |
220 |
220 |
250 |
250 |
180 |
280 |
|
|
|
113 |
|
|
|
|
|
|
при нижнем положении стола |
– |
– |
– |
– |
– |
450 |
– |
|
Расстояние в свету между |
160 |
200 |
200 |
240 |
240 |
– |
280 |
|
стойками станины, мм |
||||||||
|
|
|
|
|
|
|
||
Регулировка расстояния между |
|
|
|
|
|
|
|
|
столом и ползуном, мм: |
|
|
|
|
|
|
|
|
шатуном |
40 |
45 |
45 |
55 |
55 |
55 |
65 |
|
столом |
– |
– |
– |
– |
– |
270 |
– |
|
Толщина подштамповой плиты, |
65 |
70 |
70 |
75 |
75 |
75 |
80 |
|
мм |
||||||||
|
|
|
|
|
|
|
||
Угол наклона станины, град |
– |
30 |
– |
30 |
– |
– |
30 |
|
Размеры ползуна, мм: |
|
|
|
|
|
|
|
|
Слева–направо |
195 |
220 |
220 |
280 |
280 |
280 |
350 |
|
Спереди–назад |
162 |
190 |
190 |
225 |
225 |
225 |
285 |
|
Размеры отверстия в ползуне под |
|
|
|
|
|
|
|
|
хвостовик, мм: |
|
|
|
|
|
|
|
|
диаметр |
ЗОА |
40А |
40А |
40А |
40А |
50А |
50А |
|
глубина |
60 |
60 |
60 |
60 |
60 |
60 |
70 |
|
Наибольший ход выталкивателя |
40 |
40 |
40 |
30 |
30 |
30 |
35 |
|
в ползуне, мм: |
||||||||
|
|
|
|
|
|
|
||
Наибольшее число ходов ползуна |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
|
в минуту в одиночном режиме |
||||||||
|
|
|
|
|
|
|
||
Высота стола над уровнем пола, |
|
|
|
|
|
|
|
|
мм: |
|
|
|
|
|
|
|
|
наименьшая |
– |
– |
– |
– |
– |
650 |
– |
|
наибольшая |
745 |
760 |
760 |
820 |
– |
920 |
900 |
|
Габариты пресса, мм: |
|
|
|
|
|
|
|
|
слева–направо |
1000 |
1060 |
1060 |
1180 |
1180 |
1210 |
1305 |
|
спереди–назад |
990 |
1130 |
990 |
1600 |
1140 |
1045 |
1880 |
|
высота |
1780 |
1870 |
1870 |
2295 |
2295 |
2310 |
2610 |
|
Масса пресса, кг |
1110 |
1400 |
1325 |
1975 |
1970 |
2770 |
3140 |
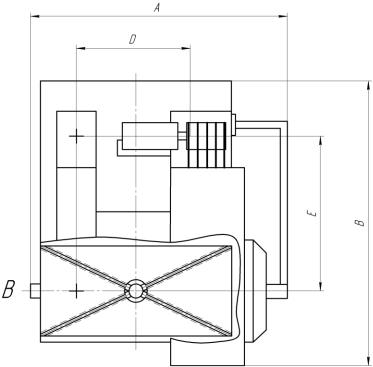
Рисунок 3 – Габариты прессов:
В – ось вала
Таблица 2 – Габариты прессов
114
Пресса |
|
Размеры, мм |
|
D |
|
Е |
|
|
|
||
КД2120Е |
440 |
|
460 |
КД2322Е |
520 |
|
735 |
КД2122Е |
510 |
|
550 |
КД2324Е |
580 |
|
810 |
КД2124Е |
580 |
|
650 |
КД1424А |
580 |
|
800 |
КД2326Е |
690 |
|
970 |
115