

14 Разработка алгоритма управления РТК
14.1 Условные графические обозначения алгоритмов
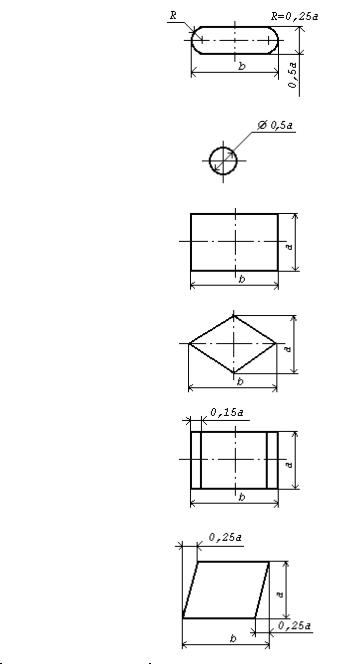
Перечень, наименование, обозначение и размеры обязательных символов и отображаемые ими функции в алгоритме должны соответствовать указанным в таблице 14.1 по ГОСТ 19.002–80.
Размер a должен выбираться из ряда 10, 15, 20 мм. Допускается увеличивать размер a на число, кратное 5. Размер b равен 1,5a.
|
Таблица 14.1 – Условные графические обозначения алгоритмов |
||
|
|
|
|
Наименование |
Обозначение и размеры в |
Функция |
|
мм |
|||
|
|
||
|
|
Начало, конец, прерывание процесса |
|
Пуск – останов |
|
обработки данных или выполнения |
|
|
программы |
||
|
|
||
|
|
|
|
Соединитель |
|
Указание связи между прерванными |
|
|
линиями потока, связывающими символами |
||
|
|
||
|
|
|
|
|
|
Выполнение операций или группы операций, |
|
Процесс |
|
в результате которых изменяется значение, |
|
|
форма представления или расположение |
||
|
|
||
|
|
данных |
|
|
|
|
|
|
|
Выбор направления выполнения алгоритма |
|
Решение |
|
или программы в зависимости от некоторых |
|
|
|
переменных условий |
|
|
|
|
|
Предопределенный |
|
Использование ранее созданных и отдельно |
|
|
описанных алгоритмов или программ |
||
процесс |
|
||
|
|
||
|
|
|
|
|
|
Преобразование данных в форму, пригодную |
|
Ввод–вывод |
|
для обработки (ввод) или отображения |
|
|
результатов обработки (вывод) |
||
|
|
||
|
|
|
|
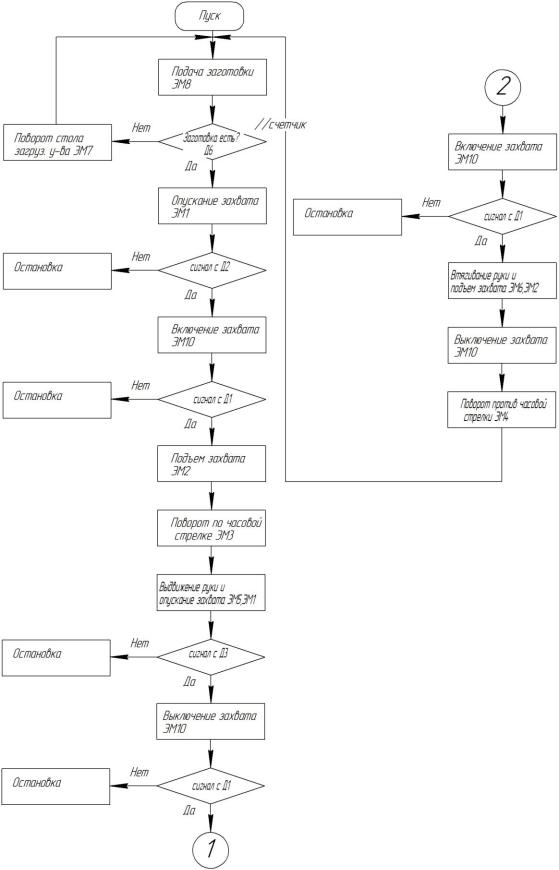
14.2 Пример выполнения алгоритма управления РТК
Составим алгоритм управления РТК на примере РТК листовой штамповки для деталей уголок, стакан и стакан с раздачей. (См. раздел 5.5)
99
100
Рисунок 14.1 – Алгоритм управления РТК
101