

Глава 4
ПЕРЕХОДНЫЕ ПРОЦЕССЫ В ЭЛЕКТРОПРИВОДАХ
4.1. Общие понятия и определения
Под переходными процессами электропривода понимаются процессы перехода от одного состояния электропривода к другому, т. е. режимы перехода от покоя к вращению и обратно, от одной скорости к другой, от одного направления вращения к другому, от одной нагрузки исполнительного механизма к другой. Таким образом, переходные процессы в электроприводе будут при пуске и торможении, регулировании скорости, реверсировании, приеме и сбросе нагрузки. Исследование переходных процессов позволяет выяснить зависимости вращающего момента двигателя, его скорости, тока и пройденного пути от времени за период перехода от одного состояния электропривода к другому.
Количество исполнительных механизмов, для которых характер протекания переходных режимов электропривода малосуществен, ограничено. К ним можно отнести механизмы длительного режима работы с постоянной нагрузкой и с редкими пусками (вентиляторы, центробежные насосы). Для большинства рабочих машин протекание переходных процессов электропривода имеет существенное значение. Например, при цикличном режиме работы с большим количеством пусков производительность машины во многом зависит от длительности пуска и торможения (одноковшовый экскаватор). С уменьшением длительности пуска и торможения уменьшается длительность рабочего цикла — производительность увеличивается. Но при сокращении длительности этих режимов возрастают динамические нагрузки в элементах рабочей машины, что может привести к их разрушению. Поэтому только нагрузочные диаграммы, построенные с учетом переходных процессов в электроприводе, дают возможность правильно проектировать электропривод.
Основной причиной переходных процессов в электроприводе являются механическая и электромагнитная инерционность. В зависимости от вида инерции, влияющей на переходные процессы, их разделяют на механические, электромагнитные и электромеханические.. Механические переходные процессы — учитывается только механическая инерция движущихся частей агрегата; электромагнитные переходные процессы — учитывается электромагнитная инерция индуктивностей обмоток электрических машин; электромеханические переходные процессы — учитываются механическая и электромагнитная инерции.
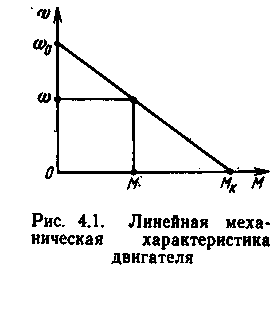
4.2. Механические переходные процессы при линейной механической характеристике двигателя и постоянном статическом моменте
Анализ механических переходных процессов в электроприводе сводится к решению уравнения движения привода
![]()
![]()
где Мк — момент двигателя при ω = 0; β = Мк / ω0 - жесткость механической характеристики.
Подставив в уравнение (4.1) значение момента из (4.2), получим
![]()
![]()
![]()
Постоянная интегрирования А определяется из начальных условий конкретного процесса.
В общем случае при t = 0 угловая скорость двигателя ω= ω нач. Тогда из уравнения (4.5)
![]()
-ЦТ..
и полное решение уравнения (4.4) будет
![]()
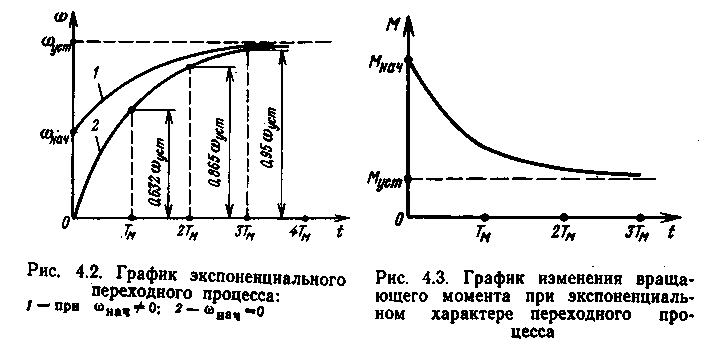
Из полученного выражения (4.6) следует, что изменение скорости происходит по экспоненциальному закону.
![]()
На рис. 4.2 представлены графики изменения скорости.
![]()
![]()
![]()
Следовательно, вращающий момент и ток двигателя изменяются по экспоненциальному закону (рис. 4.3).