

10.3. Принципы автоматического управления пуском электроприводов
Ниже рассмотрены принципы автоматического пуска электроприводов с пусковым реостатом в цепи ротора асинхронного двигателя или якоря двигателя постоянного тока.
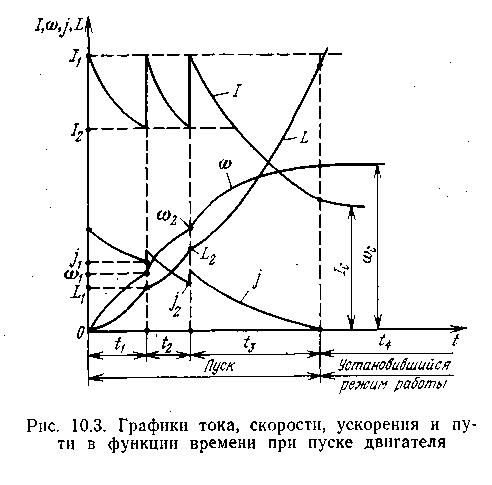
На рис. 10.3 приведены графики изменения тока I, скорости ω, ускорения j и пути L от времени при пуске двигателя в ход с реостатом в две ступени (t1 и t2) и на естественной, характеристике (t3).
Если кривые рис. 10.3 соответствуют заданному закону изменения движения привода, то при достижении током величины I2, скоростью — ω1 ускорением — j, и пути — L1 через промежуток времени t1 автоматически должна быть закорочена первая секция реостата. Затем, через промежуток времени t2, при достижении током величины I2, скоростью — ω2, ускорением j2 и пути — L2 должна замкнуться вторая секция. В дальнейшем разгон будет происходить на естественной характеристике.
Следовательно, управление пуском может быть осуществлено соответственно в функции времени, тока, скорости, ускорения и пути.
Управление в функции времени. При автоматическом управлении пуском в функции времени момент переключения ступеней пускового реостата определяется временем разгона на каждой ступени t1 и t2 (см. рис. 10.3). Управление по этому принципу ведется с помощью реле времени.
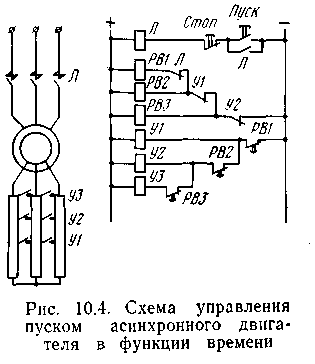
На рис. 10.4 приведена схема управления пуском асинхронного двигателя в функции времени. При выключенном двигателе катушки реле времени РВ1 и РВ2 питаются постоянным током через закрытые контакты Л и У1. При включении линейного контактора Л разомкнётся цепь катушки реле РВ1, которое с выдержкой времени t1 замкнет контакт РВ1 в цепи катушки контактора У1. Контактор своими главными контактами У1 зашунтирует первую секцию реостата, а блок-контактом У1 разомкнет цепь катушки реле РВ2. Это реле с выдержкой времени t2 замкнет свой контакт РВ2, включив цепь катушки контактора У2, который главными контактами У2 зашунтирует вторую секцию реостата, и т. д.
К достоинствам этого способа пуска относятся простота и надежность, а к недостаткам — появление больших токов при увеличении нагрузки на валу двигателя и затягивания пуска при % снижении нагрузки.
Управление в функции тока. Для реализации этого способа пуска используются электромагнитные токовые реле. При этом должен фиксироваться момент, когда ток снизится до величины I2 и в этот момент должна шунтироваться соответствующая секция пускового реостата. Для простоты предположим, что реостат имеет одну ступень. Такая схема приведена на рис. 10.5 а. Реле тока Рис 10.4. Схема управления РТ включено в цепь статора через трансформатор тока. Контакты реле РТ находятся в цепи катушки контактора У. Контакты реле РТ замыкаются при токе I≤ I2. Если ток I>I2, то контакты РТ разомкнуты.
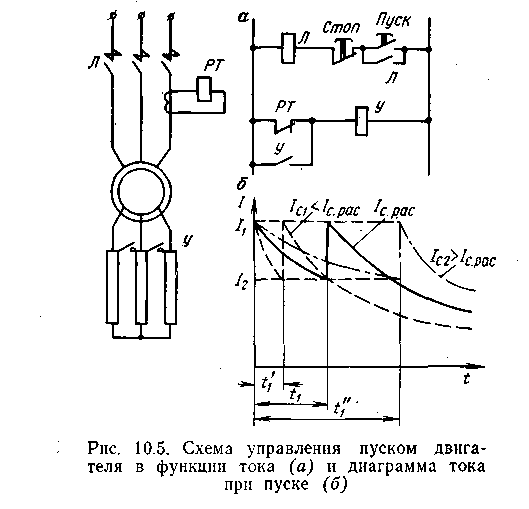
При включении двигателя в сеть ток статора равен I1, контакт РТ разомкнут, разомкнуты и контакты контактора У. Когда ток статора снизится до величины, равной I2, контакт РТ замкнется, включит катушку контактора У и контакты У замкнутся. Главные контакты У зашунтируют пусковой реостат, а блок-контакт У зашунтирует контакт РТ. Ток статора увеличится до величины I1 контакт РТ разомкнётся, но контактор У останется включенным, так как цепь катушки его замкнута собственным блок-контактом У.
При таком пуске пусковой ток I1 и ток переключения I2 будут оставаться неизменными при любой нагрузке, но будет изменяться длительность разгона, что видно по кривым рис. 10.5, б

Этот принцип автоматизации пуска в ход электродвигателей применяется довольно часто. Иногда используют оба рассмотренных выше принципа вместе.
Управление в функции скорости. При таком управлении требуется контроль скорости вращения двигателя с воздействием на соответствующий аппарат управления. Угловую скорость можно контролировать центробежным реле или тахогенератором, но чаще прибегают к косвенным методам контроля скорости: через э. д. с. якоря двигателя постоянного тока или через частоту тока ротора асинхронного двигателя.
На рис. 10.6 приведена схема автоматического управления пуском двигателя постоянного тока в функции скорости. При нажатии кнопки «Пуск» включается контактор Л в цепи якоря двигателя и блок-контакт Л, шунтирующий кнопку «Пуск». Двигатель разгоняется с полностью включенным реостатом. По мере увеличения скорости двигателя растет его э. д. с. и при скорости q>i напряжение на катушке контактора У1 будет достаточным для его включения. Это вызовет замыкание контакта У1 и первая ступень пускового реостата R1 зашунтируется. Электродвигатель переходит на новую механическую характеристику
и продолжает увеличивать скорость. При скорости ω2 э. д. с. якоря двигателя будет достаточной для включения контактора У2, контакт У2 шунтирует вторую ступень реостата и двигатель дальше разгоняется на естественной характеристике.
Таким образом, любой скорости со, при которой должно совершаться шунтирование секции реостата, соответствует определенная частота тока ротора f2.
На рис. 10.7 приведена схема пуска асинхронного двигателя с использованием резонансного реле частоты РУ. При неподвижном роторе реле РУ не работает, так как велико индуктивное сопротивление его катушки. При увеличении скорости частота тока ротора уменьшается и уменьшается индуктивное сопротивление катушки реле. При угловой скорости, соответствующей переключению ступени реостата, реле РУ сработает, включится контактор У и зашунтирует реостат в цепи ротора.
Управление в функции ускорения и пути. Управление пуском электродвигателей в функции ускорения в контакторных схемах применяется редко. В замкнутых системах электропривода постоянного тока этот принцип применяется широко.
В электроприводах, в которых фиксируется путь, например конечными и путевыми выключателями, можно осуществить управление в функции пути. Этот принцип часто используется для подачи импульсов на начало торможения. Принцип управления по пути широко используется при автоматизации подъемных установок.
Схемы замкнутых систем управления рассмотрены во втором разделе книги.
РАЗДЕЛ ВТОРОЙ
ЭЛЕКТРООБОРУДОВАНИЕ ГОРНЫХ МАШИН И МЕХАНИЗМОВ КАРЬЕРОВ И ПРИИСКОВ
Г л а в а 11
ОСОБЕННОСТИ ЭКСПЛУАТАЦИИ ЭЛЕКТРООБОРУДОВАНИЯ КАРЬЕРОВ И ПРИИСКОВ