

2.5. Статические моменты рабочих машин
При проектировании и исследовании электропривода нужно знать характер изменения статического момента рабочей машины. Статические моменты рабочих машин могут изменяться
в широких пределах в зависимости от различных факторов (скорости, пути, времени и др.).
По характеру изменения статического момента все механизмы и машины могут быть разделены на следующие группы:
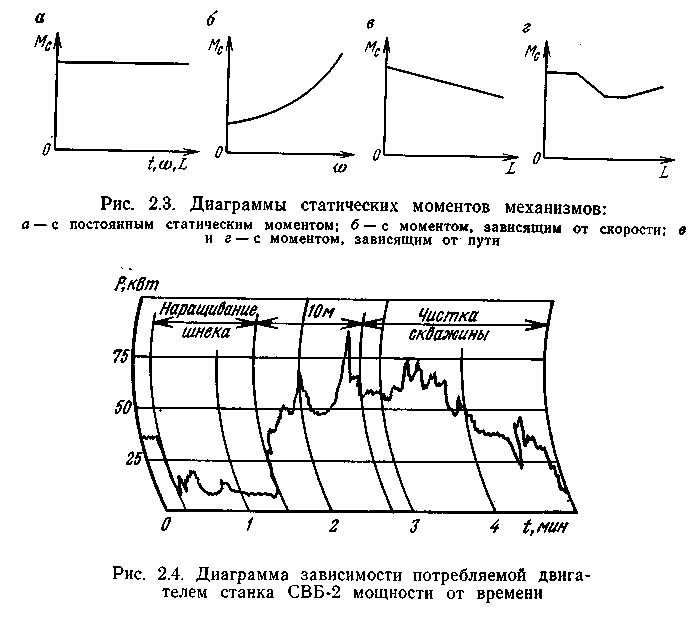
машины с постоянным статическим моментом (рис. 2.3,а). К ним можно отнести ленточные конвейеры, уравновешенные подъемные установки с хвостовым канатом и т. п.;
машины, у которых статический момент зависит от скорости (рис. 2.3, б). К ним относятся центробежные и осевые вентиляторы, насосы и турбокомпрессоры;
машины со статическим моментом, зависящим от пути. Сюда можно отнести поршневые компрессоры, насосы, электровозы, подъемные машины без хвостового каната. На рис. 2.3, в приведена диаграмма моментов шахтного подъема без хвостового каната, а на рист. 2.3, г — электровоза;
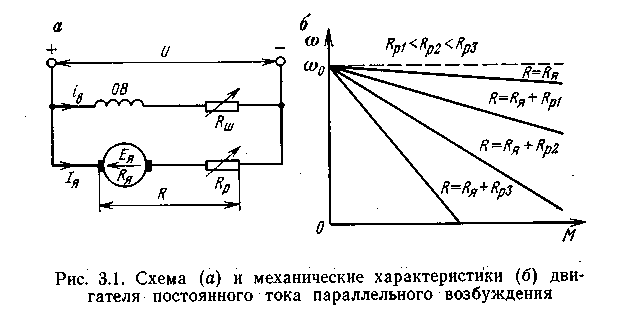
машины, в которых статический момент зависит от ряда технологических факторов, изменяющихся случайно во времени. К этим машинам можно отнести все горные машины по добыче (экскаваторы, погрузочные, бурильные и врубовые машины и др.). Для примера на рис. 2.4 приведена зависимость потребляемой двигателем станка СВБ-2 мощности от времени.
Глава 3
МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРИЧЕСКИХ ДВИГАТЕЛЕЙ
3.1. Основные понятия и определения
Механической характеристикой электрического двигателя называют зависимость его угловой скорости от вращающего момента, т. е. o) = f(M).
Механические характеристики электродвигателей можно разделить на три основных категории:
абсолютно жесткая механическая характеристика, при которой угловая скорость при изменении момента не изменяется (такую характеристику имеют синхронные двигатели);
жесткая механическая характеристика, при которой угловая скорость с изменением момента хотя и падает, но незначительно (такую характеристику имеют двигатели постоянного тока параллельного возбуждения и асинхронные двигатели в пределах рабочей части характеристики);
3) мягкая механическая характеристика со значительным падением угловой скорости при увеличении момента (такую характеристику имеют двигатели постоянного тока последовательного возбуждения).
Механические характеристики могут быть естественными и искусственными. Естественная механическая характеристика представляет собой зависимость ω = f(M) при нормальных условиях работы двигателя, т.е. при номинальном напряжении, потоке, частоте и при отсутствии дополнительных сопротивлений в силовой цепи (в цепи якоря, ротора и статора). При отсутствии одного из этих условий механическая характеристика будет искусственной.
Механические характеристики имеют важное значение для оценки электромеханических свойств двигателя и являются одним из основных критериев при выборе того или иного двигателя для исполнительного механизма.
3.2. Механические характеристики двигателей постоянного тока
Аналитическое выражение механической характеристики двигателя постоянного тока можно получить из уравнения равновесия напряжений якорной цепи (при установившемся режиме)
![]()
где U — напряжение на зажимах двигателя, В; 1Я — ток в цепи якоря, A; Rя — сопротивление цепи якоря, Ом; Ф — магнитный поток двигателя, Вб; ω — угловая скорость якоря, рад/с; сд — коэффициент, зависящий от конструктивных данных двигателя. Решив уравнение (3.1) относительно угловой скорости, получим уравнение скоростной характеристики двигателя
![]()
Электромагнитный вращающий момент двигателя (Н • м) пропорционален магнитному потоку и току якоря:
![]()
Из уравнения (3.3) ток якоря
![]()
Подставив в уравнение (3.2) значение тока, выраженное уравнением (3.4), получим уравнение механической характеристики двигателей постоянного тока независимо от способа возбуждения

Рассмотрим механические характеристики двигателей постоянного тока в зависимости от способа возбуждения.
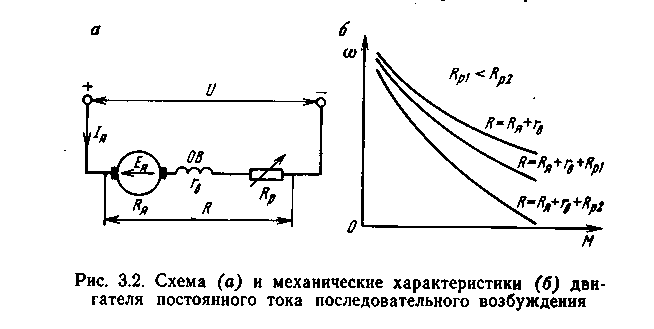
Двигатели постоянного тока параллельного возбуждения. Схема включения двигателя постоянного тока параллельного возбуждения приведена на рис. 3.1, а. Обмотка возбуждения ОВ может быть подключена к той же сети, что и якорь, или к отдельному источнику тока (независимое возбуждение). В том и другом случае ток возбуждения не зависит от процессов, происходящих в якоре двигателя и при постоянном напряжении сети магнитный поток можно считать постоянным Ф = const. Обозначив сдФ=kд и подставив его в уравнение (3.5), получим уравнение механической характеристики двигателя постоянного тока параллельного возбуждения
![]()
![]()
называется скоростью идеального холостого хода.
![]()
![]()
Из уравнений (3.6) и (3-.9) видно, что механическая характеристика двигателя параллельного возбуждения является прямой линией, тангенс угла наклона которой определяется величиной Rя/kд2
На рис. 3.1,6 приведены естественная и искусственные механические характеристики, полученные введением в цепь якоря реостата. Такие искусственные характеристики используются при пуске и торможении двигателя.
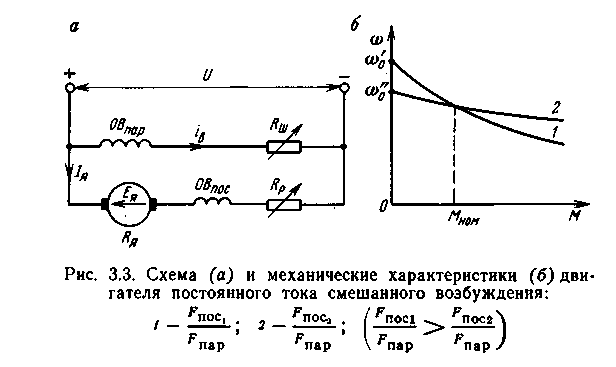
Двигатели постоянного тока последовательного возбуждения. Схема включения двигателя последовательного возбуждения приведена на рис. 3.2, а. Обмотка возбуждения ОВ включена последовательно с якорем и по ней протекает ток якоря. Следовательно, магнитный поток двигателя является функцией тока якоря. Эта зависимость выражается графически в виде кривой намагничивания, которая является нелинейной функцией и не имеет аналитического выражения. Поэтому нельзя получить аналитическую зависимость для механической характеристики.
Характерной особенностью двигателей последовательного возбуждения является то, что изменение магнитного потока с изменением тока якоря оказывает большое влияние на скорость двигателя. Это хорошо видно из уравнения скоростной характеристики
![]()
которое показывает, что с изменением магнитного потока скорость двигателя может изменяться в широких пределах.
Если для упрощения предположить, что магнитная цепь двигателя не насыщена и поток пропорционален току
Ф = сф/Я,
то момент двигателя
![]()
где k = cд / сф.
Подставив в уравнение скоростной характеристики значение Ф = Сф/я, получим
![]()
Заменив в уравнении ток якоря его выражением из (3.10), получим уравнение механической характеристики

![]()
Вследствие нелинейной зависимости магнитного потока от тока якоря аналитическое выражение механической характеристики, так же как и для двигателя последовательного возбуждения, получить нельзя.
В зависимости от соотношения магнитных потоков обмоток возбуждения механические характеристики имеют различную жесткость. Чем больше доля магнитного потока последовательной обмотки, тем мягче характеристика. На рис. 3.3 приведены две естественные характеристики с различным соотношением магнитных потоков обмоток возбуждения. Обмотка параллельного возбуждения создает поток Фпар независимый от тока якоря, поэтому двигатель может работать вхолостую со скоростью
![]()