

12.4. Системы электропривода
Для осуществления требуемых механических экскаваторных характеристик приводов главных рабочих механизмов одноковшовых экскаваторов могут применяться следующие системы электропривода: асинхронный привод, генератор—двигатель с трехобмоточным генератором (ТГ—Д), генератор—двигатель с электромашинным усилителем (Г—Д с ЭМУ), генератор—двигатель с силовым магнитным усилителем (Г—Д с СМУ), генератор—двигатель с электромашинным усилителем и промежуточным магнитным усилителем (Г—Д с ЭМУ и ПМУ), генератор— двигатель с силовым и промежуточным магнитными усилителями (Г—Д с СМУ и ПМУ), генератор—двигатель с ти-ристорным возбудителем (Г—Д с ТВ), тиристорный преобразователь—двигатель (ТП—Д).
Асинхронный привод. В качестве приводного двигателя применяются асинхронные двигатели с короткозамкнутой и фазной обмоткой ротора. Механические характеристики асинхронных двигателей мало подходят для привода экскаватора.
К недостаткам этого типа привода следует отнести громоздкость и малую надежность аппаратуры управления.
Указанные недостатки ограничили в настоящее время область применения асинхронного привода экскаваторами небольшой мощности.
Привод по системе ТГ—Д. Получение экскаваторной характеристики в системе ТГ—Д достигается применением на генераторе трех обмоток возбуждения: 1) обмотки независимого возбуждения; 2) параллельной обмотки возбуждения, действующей согласно с первой; 3) последовательной обмотки возбуждения, включенной в главную цепь генератора и действующей навстречу двум выше указанным обмоткам.
Обмотка независимого возбуждения является задающей, она получает питание от возбудителя. Управление приводом осуществляется с помощью командоконтроллера.
К основным недостаткам системы ТГ—Д относятся: сравнительно большая величина постоянной времени привода, что снижает его быстродействие; низкий коэффициент заполнения характеристики; значительные токи управления в цепи обмотки возбуждения генератора.
Система ТГ—Д применялась на экскаваторах СЭ-3, а также :на экскаваторах ЭКГ-4, ЭШ-5/45 и ЭШ-6/60 первых выпусков.
Привод по системе (Г—Д с СМУ). Принципиальная схема привода по системе Г—Д с СМУ приведена на рис. 12.4. В этой системе привода независимая обмотка генератора Гн получает питание от силового магнитного усилителя СМУ, а управление приводом сосредоточено в цепи задающей обмотки 03 СМУ. Генератор имеет и шунтовую обмотку Гш, м. д. с. которой действует согласно с м. д. с. независимой обмотки Гн. Таким образом, в системе привода осуществлена положительная обратная связь по напряжению генератора и за счет этого уменьшается м. д. с. и ток возбуждения независимой обмотки Гн генератора. В системе привода имеется и отрицательная обратная связь по напряжению генератора, которая создается обмоткой ОН СМУ.
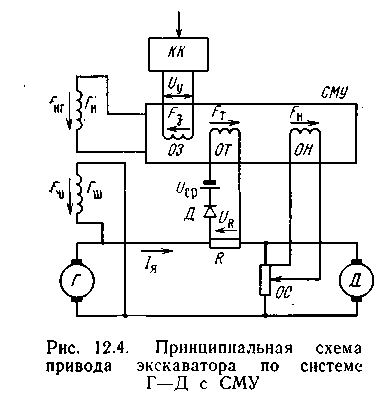
Результирующая м. д. с. СМУ равна разности м. д. с. F3—Fn. Следовательно, чем меньше Fн, тем больше результирующая м. д. с. и тем больше напряжение на выходе СМУ. Это в свою очередь вызывает увеличение м. д. с. Fнг независимой обмотки возбуждения генератора и, следовательно, увеличение напряжения генератора. За счет отрицательной обратной связи по напряжению генератора повышается жесткость внешней характеристики генератора и механической характеристики привода. Кроме того, отрицательная обратная связь дает возможность осуществить форсировку возбуждения генератора при пуске привода. При пуске привода напряжение генератора мало, поэтому результирующая м. д. с. СМУ определяется в основном м. д. с. F3 задающей обмотки. Напряжение на выходе СМУ и на обмотке Ги будет значительно больше напряжения при нормальной работе. Ток возбуждения и м. д. с. обмотки Гн возрастают быстро.
По мере разгона привода (увеличения напряжения генератора) возрастает м. д. с. FH и результирующая м. д. с. СМУ уменьшается до номинальной величины.
Форсировка возбуждения генератора дает возможность уменьшить длительность разгона привода и, следовательно, длительность цикла экскавации.
Для получения экскаваторной характеристики привода в системе Г—Д с СМУ имеется отрицательная обратная связь по току с отсечкой. Узел этой связи в схеме состоит из обмотки ОТ СМУ, источника напряжения сравнения £/ср и сопротивления R в цепи якорей генератора и двигателя. Рассмотрим действие этой обратной связи. Напряжение UR, представляющее собой падение напряжения на сопротивлении R, при протекании тока якоря Iн (UR = lяR), направлено встречно напряжению сравнения Ucp. Таким образом, ток в цепи обмотки ОТ определяется разностью этих двух напряжений UR — Ucv. Но так как в цепи обмотки ОТ включен диод Д, то ток в обмотке может протекать только в направлении UR. Если VR<UCV, ток в цепи обмотки ОТ не протекает и обратная связь по току не действует. При UR>UCV под действием напряжения ΔU=UR— Ucp по обмотке ОТ протекает ток и создает м. д. с. FT, направленную встречно м. д. с. задающей обмотки F3. М. д. с. Ft: размагничивает СМУ, напряжение на выходе его резко уменьшается, что в свою очередь приводит

к уменьшению м. д. с. Fнг и напряжения генератора почти до нуля.
На рис. 12.5 приведена внешняя характеристика генератора системы Г—Д с СМУ. На участке характеристики U0 а отрицательная обратная связь по току не действует, так как UR = = Iя R<Uср. В точке а вступает в действие обратная связь при токе отсечки Iотс, при этом UR = Iотс R>Uср. При стопорном токе Iст напряжение генератора становится равным нулю.
Так как сопротивление R, к которому подключена обмотка ОТ, величина постоянная, то напряжение UR зависит только от тока якоря Iя.
Ток отсечки Iотс и стопорный ток Iст зависят от напряжения сравнения Uср. Уменьшение напряжения сравнения вызывает уменьшение токов Iотс и Iст (точки а” и I”ст) и, наоборот, с увеличением Uср токи Iотс и Iст возрастают (точки а" и I"ст). Таким образом, в системе привода Г—Д с СМУ при наладке привода довольно просто можно регулировать величину стопорного тока.
Достоинством привода по системе Г—Д с СМУ являются:
высокий коэффициент заполнения экскаваторной характеристики;
высокое быстродействие привода, что уменьшает длительность переходных процессов (разгона, реверса и торможения);
малый ток цепи управления задающей обмотки;
высокая надежность работы системы управления за счет сокращения релейно-контакторной аппаратуры и применения статических аппаратов — магнитных усилителей.
Система Г—Д с СМУ применяется на экскаваторах ЭКГ-4,6, ЭКГ-8И, ЭШ-5/45М, ЭШ-10/70.
Привод по системе Г—Д с ЭМУ. В этой системе привода в качестве возбудителя генератора используется электромашинный усилитель поперечного поля ЭМУ. Эта система отличается от системы Г—Д с СМУ только видом усилителя.
Система Г—Д с ЭМУ применялась на первых мощных экскаваторах (ЭШ-14/75, ЭГЛ-15), но из-за присущих ей недостатков от нее отказались. К недостаткам этой системы относятся: наличие петли гистерезиса ЭМУ, которая обусловливает значительную остаточную э. д. с. и, следовательно, появление остаточных токов и «ползучих» скоростей; низкая стабильность работы ЭМУ и привода в целом; сложность наладки привода.
Привод по системе Г—Д с ЭМУ и ПМУ. В системе Г—Д с ЭМУ и ПМУ в значительной степени устранены недостатки системы Г—Д с ЭМУ, отмеченные выше.
В системе Г—Д с ЭМУ и ПМУ кроме электромашинного усилителя применяется еще и промежуточный магнитный усилитель ПМУ.
Принципиальная схема привода по системе Г—Д с ЭМУ и ПМУ приведена на рис. 12.6.
В этой системе в качестве возбудителя генератора используется электромашинный усилитель поперечного поля. Задающая обмотка ЭМУ получает питание от промежуточного магнитного усилителя ПМУ.
Управление приводом осуществляется в цепи задающей обмотки ПМУ (командоконтроллер КК и обмотка 03). ПМУ имеет обмотки отрицательной связи по напряжению ОН и по току ОТ. Как видно на рис. 12.4 и 12.6, цепи управления и обратных связей аналогичны. Все, что было сказано о них при описании действия привода по системе Г—Д с СМУ, является справедливым и для системы Г—Д с ЭМУ и ПМУ. Внешние характеристики генератора системы Г—Д с ЭМУ и ПМУ аналогичны характеристикам системы Г—Д с СМУ (см. рис. 12.5).
Система обладает недостатками, связанными с наличием в системе вращающихся усилителей — ЭМУ поперечного поля. Привод по системе Г—Д с ЭМУ и ПМУ применяется на некоторых типах мощных экскаваторов (ЭКГ-8, ЭШ-14/75, ЭВГ-35/65).
Привод по системе Г—Д с СМУ и ПМУ. Для управления приводами мощных экскаваторов целесообразно использовать вместо электромашинного усилителя силовой магнитный усилитель, оставив в системе привода и промежуточный усилитель, т. е. сделать систему Г—Д с СМУ и ПМУ.
Преимущества такой системы по сравнению с Г—Д с СМУ следующие: уменьшаются размеры силового магнитного усилителя; возрастает коэффициент усиления при одновременном увеличении быстродействия; уменьшаются размеры аппаратуры управления и элементов обратных связей; облегчается получение сигнала обратной связи по току главной цепи.
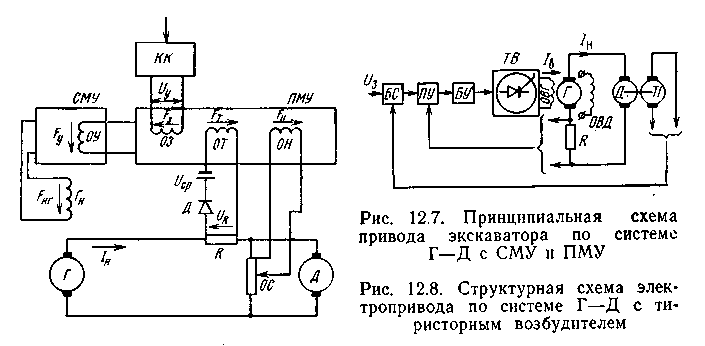
Принципиальная схема системы Г—Д с СМУ и ПМУ приведена на рис. 12.7. Эта схема отличается от схемы привода по системе Г—Д с ЭМУ и ПМУ только усилителем второй ступени: вместо ЭМУ применен СМУ. В остальном схема, ее работа, назначение отдельных элементов аналогичны схеме системы Г—Д с ЭМУ и ПМУ.
Замена ЭМУ силовым магнитным усилителем СМУ в значительной степени повышает надежность работы привода экскаватора.
Применение тиристорного управления электроприводами одноковшовых экскаваторов. Дальнейшее совершенствование систем электропривода идет по пути применения управляемых кремниевых вентилей (тиристоров) либо для питания обмоток возбуждения генераторов (система Г—Д с тиристорным возбудителем), либо для питания приводных двигателей (система тиристорный преобразователь — двигатель).
На рис. 12.8 показана структурная схема электропривода по системе Г—Д с тиристорным возбудителем ТВ. Особенностью этой системы является реверсивный тиристорный возбудитель ТВ, питающий обмотку возбуждения ОВГ генератора Г. Ток возбуждения регулируется изменением величины угла отпирания тиристоров при помощи блока управления БУ, который получает управляющий сигнал от промежуточного усилителя ПУ.
В схеме предусматривается отрицательная обратная связь по скорости вращения, осуществляемая через тахогенератор ТГ.
Сигнал, пропорциональный частоте вращения двигателя, сравнивается в блоке сравнения БС с задающим сигналом U3, определяющим величину установившейся скорости и направление вращения двигателя. Ток нагрузки Iн ограничивается обратной связью по току. Сигнал, пропорциональный току нагрузки, снимается с сопротивления R
Применение тиристорных возбудителей в электроприводах мощных экскаваторов дает возможность обеспечить широкий диапазон регулирования частоты вращения двигателя, улучшить устойчивость, повысить форсировку по напряжению генераторов и крутизну токовой отсечки и таким образом существенно улучшить статические и динамические характеристики электроприводов.
Наиболее перспективным является применение тиристорного возбуждения генераторов и двигателей (система Г—Д с ТВ) для экскаваторов с ковшами емкостью 8 м3 и более, где устанавливаются электродвигатели мощностью от 500 до нескольких тысяч киловатт. В настоящее время система Г—Д с ТВ применяется на экскаваторах ЭКГ-12,5, ЭШ-15/90 А. Для одноковшовых экскаваторов с ковшами емкостью до 5 м3, где мощность самых крупных электродвигателей не превышает 250 кВт, целесообразно применение привода по системе ТП-Д.
В настоящее время разработаны тиристорные приводы главных механизмов экскаваторов ЭКГ-3,2 и ЭКГ-5. Имеются опытные образцы экскаваторов ЭКГ-4,6, где привод основных механизмов осуществляется по системе ТП—Д.
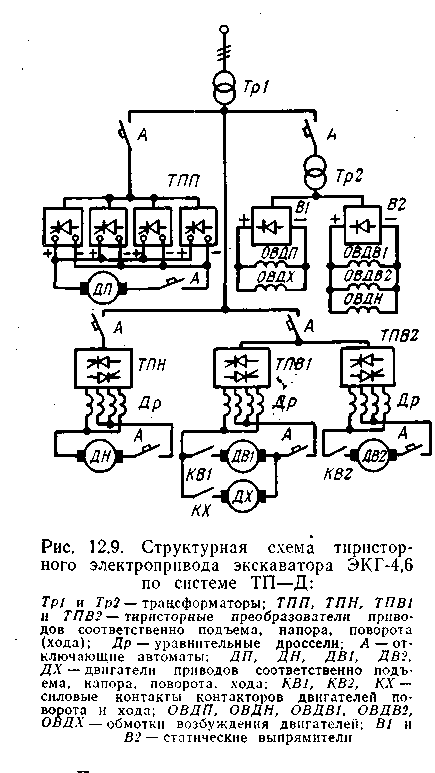
На рис. 12.9 приведена структурная схема тиристорного электропривода экскаватора ЭКГ-4,6 по системе ТП—Д. На экскаваторе ЭКГ-4,6 вместо пятимашинного преобразовательного агрегата (Г—Д) установлен тиристорный преобразователь. Установка преобразователя потребовала комплексной замены электрооборудования экскаватора.
Комплект установленного оборудования включает силовые тиристоры, систему импульсно-фазового управления, систему автоматического управления, силовой трансформатор, трансформаторы собственных нужд, защитную, коммутационную и контрольно-измерительную аппаратуру.
Двухдвигательный привод поворота питается от отдельных тиристорных преобразователей ТПВ1—ТПВ2, Обмотки возбуждения двигателей получают питание от двух выпрямителей В1 и В2, собранных по однофазной двухполупериодной схеме. Питание тиристорных преобразователей, выпрямительных мостов и вспомогательных механизмов осуществляется от масляного силового двухобмоточного трансформатора Tpl мощностью 630 кВ • А. В преобразователях предусмотрена защита от токов к. з. автоматами А-3144 на стороне как переменного, так и постоянного тока.
Внедрение регулируемых тиристорных электроприводов взамен машинных преобразователей на одноковшовых экскаваторах позволяет сократить расход электроэнергии, снизить динамические нагрузки в механизмах, улучшить условия труда машинистов экскаваторов и повысить их производительность.