5.4. Тормозные режимы двигателей
Двигатели постоянного тока и асинхронные двигатели трехфазного тока позволяют применять три вида электрического торможения: генераторное торможение с рекуперацией энергии в сеть, динамическое торможение и торможение противовключением.
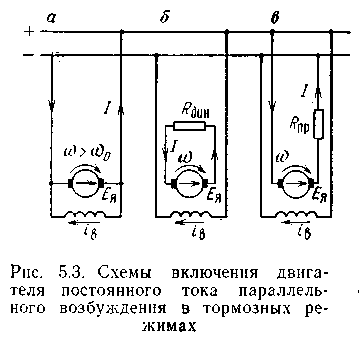
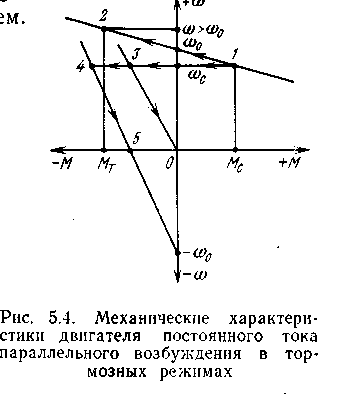
Двигатели постоянного тока параллельного возбуждения. На рис. 5.3 представлены схемы включения двигателя, а на рис. 5.4 — механические характеристики в тормозных режимах.
Генераторное торможение с рекуперацией энергии в сеть (рис. 5.3, а) может быть только при скорости вращения якоря, большей скорости идеального холостого хода, т. е. ω>ω0. В этом случае Е> U и величина тормозного тока определяется уравнением

Динамическое торможение (рис. 5.3, б) можно применять при любой скорости вращения якоря двигателя, отличной от нуля. Якорь двигателя при динамическом торможении отключается от сети и замыкается на тормозное сопротивление RAnn-Обмотка возбуждения обычно включается в сеть постоянного тока для создания неизменного магнитного потока двигателя.
Величина тока якоря при динамическом торможении определяется выражением
![]()
Так как Е пропорциональна скорости вращения якоря, то при малых скоростях динамическое торможение малоэффективно.
Торможение противовключением (рис. 5.3, в) возможно при всех значениях скорости, вплоть до полной остановки двигателя.
При противовключении двигатель вращается в обратную сторону. При этом э. д. с. Е действует согласно с приложенным напряжением (если изменить направление тока в обмотке возбуждения). Ток якорной цепи двигателя определится по выражжению
![]()
Двигатели постоянного тока последовательного возбуждения могут иметь два режима торможения: динамическое торможение и торможение противовключением. Генераторное торможение с рекуперацией энергии в сеть при обычной схеме включения двигателя невозможно, так как двигатель не имеет скорости идеального холостого хода. Этот режим торможения возможен, если обмотку возбуждения подключить к независимому источнику тока.
Схемы включения двигателя приведены на рис. 5.5, а механические характеристики — на рис. 5.6.
Динамическое торможение можно применять при любой скорости, однако при малых скоростях эффективность торможения резко снижается. При этом режиме работы двигатель может быть включен по схемам, приведенным на рис. 5.5, а и б.
В первой схеме двигатель отключается от сети и замыкается на тормозное сопротивление. Концы обмотки возбуждения следует поменять местами с целью предотвращения размагничивания двигателя. Вторая схема широкого применения не получила, так как в тормозном сопротивлении, включенном последовательно с обмоткой возбуждения, получаются большие потери электроэнергии.
В остальном этот режим протекает так же, как и в двигателе параллельного возбуждения. Участок 2—0 механической характеристики соответствует динамическому торможению.
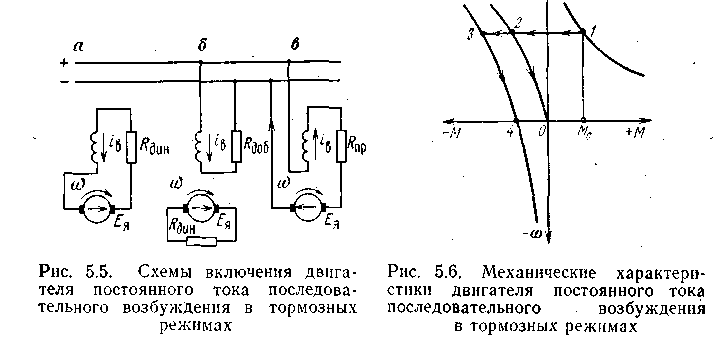
Торможение противовключением (рис. 5.5, в) осуществляется и протекает точно так же, как и в двигателе параллельного возбуждения. Участок 3—4 механической характеристики (рис. 5.6) соответствует торможению противовключением
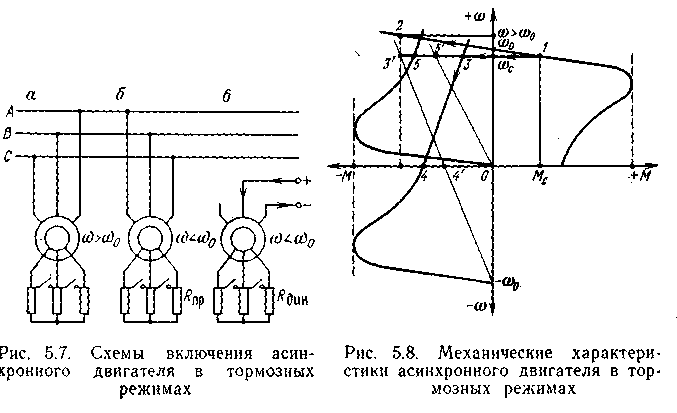
Асинхронные двигатели трехфазного тока.
В асинхронных двигателях возможны три тормозных режима: торможение с рекуперацией энергии в сеть; торможение противовключением и динамическое торможение.
На рис. 5.7 приведены схемы включения двигателя, а на рис. 5.8 механические характеристики при тормозных режимах.
При торможении с рекуперацией энергии в сеть (рис. 5.7, а) направление вращения вращающегося магнитного потока статора совпадает с направлением вращения ротора. Скорость вращения ротора больше скорости вращения магнитного потока, т. е. (о>со0- Механическая энергия, подводимая к валу ротора извне (например, создаваемая опускаемым грузом), преобразуется в электрическую и отдается в сеть. Применяется этот режим торможения для поддержания постоянной скорости при опускании груза в подъемных установках. На механических характеристиках (см. рис. 5.8) этому режиму работы соответствует точка 2.
При торможении противовключением ротор двигателя вращается в сторону, противоположную вращению магнитного потока статора. Этот режим работы может быть получен путем реверсирования двигателя на ходу (рис. 5.7, б). Ротор под действием запасенной кинетической энергии продолжает вращаться в прежнем направлении, а поле статора изменяет свое направление вращения.
Режиму торможения противовключением соответствуют участки механических характеристик (см. рис. 5.8) 3—4 для двигателя с короткозамкнутым ротором и 3'—4'( на реостатной характеристике двигателя с фазовым ротором) соответствуют динамическому торможению.