

7.5. Многодвигательные системы электропривода
Многодвигательный привод с механической связью (работа на один вал). При совместной работе двигателей, имеющих абсолютно жесткое соединение роторов (якорей), они имеют одинаковую угловую скорость. Поэтому механическая характеристика привода может быть получена суммированием моментов отдельных двигателей. На рис. 7.9 приведены механические характеристики двух двигателей при работе на один вал.

Если двигатели имеют одинаковую жесткость и одинаковые пограничные скорости, то нагрузка (момент) распределится между ними поровну. Но механические характеристики двигателей могут отличаться как по жесткости, так и по граничной скорости. Двигатель с более жесткой характеристикой (прямая 1 на рис. 7.9, а) примет большую нагрузку. Если пограничные скорости неодинаковы, то при одинаковой жесткости характеристик двигатель с большей пограничной скоростью (прямая 1 на рис. 7.9, б) будет нагружен больше. При этом может оказаться, что двигатель, имеющий меньшую пограничную скорость, будет работать в генераторном режиме (прямая 2 на рис. 7.9, б), нагружая другой двигатель (работа со скоростью ω1 на рис. 7.9, б).
Во избежание таких явлений необходимо обеспечить одинаковые жесткости механических характеристик и одинаковые пограничные скорости. Изменение жесткости характеристик возможно включением дополнительного сопротивления в цепь якоря или ротора, а изменение пограничной скорости — регулированием тока возбуждения двигателя.
Электропривод по системе электрического вала. Системы электропривода, содержащие несколько механически не связанных между собой двигателей и обеспечивающих одинаковую частоту вращения вне зависимости от их на-
грузки, называются установками синхронного вращения или электрическим валом. Такие системы могут быть с вспомогательными машинами и без вспомогательных машин.
На рис. 7.10 приведена схема синхронного вращения асинхронных двигателей с вспомогательными машинами. На валу главных двигателей Д1 и Д2 установлены уравнительные асинхронные двигатели АД1 и АД2. Обмотки роторов двигателей АД1 и АД2 соединены так, что угол сдвига между э. д. с роторов равен 180°.
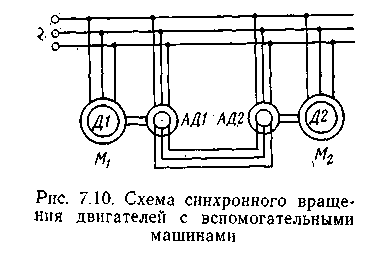
Если нагрузки двигателей Д1 и Д2 равны, то при одинаковых характеристиках скорости их валов будут одинаковы. В этом случае э. д. с. роторов Е21 и Е22 двигателей АД1 и АД2 одинаковы по величине и сдвинуты по фазе на угол 1800 ток в цепи роторов этих двигателей отсутствует и моменты их равны нулю.
Если статический момент на валу двигателя Д2 увеличится, то скорость его уменьшится.
При этом э. д. с. ротора двигателя АД2 увеличится и сдвинется по фазе относительно э. д. с. ротора двигателя АД1. В цепи роторов возникнет результирующая э. д. с. ΔЕ2, под действием которой по обмоткам роторов будет протекать уравнительный ток I2у, отстающий на угол φ2 от э. д. с. ΔЕ2:
![]()
Моменты вспомогательных машин могут быть представлены уравнениями
![]()