

15.3. Способы питания и схемы управления электроприводами
Способ питания электроэнергией конвейерных установок определяется сложностью конвейерной линии, количеством конвейерных приводов,.взаимозависимостью их работы и общей системой распределения электроэнергии, применяемой на данном карьере.
Наибольшее распространение получили следующие схемы питания конвейерных установок:
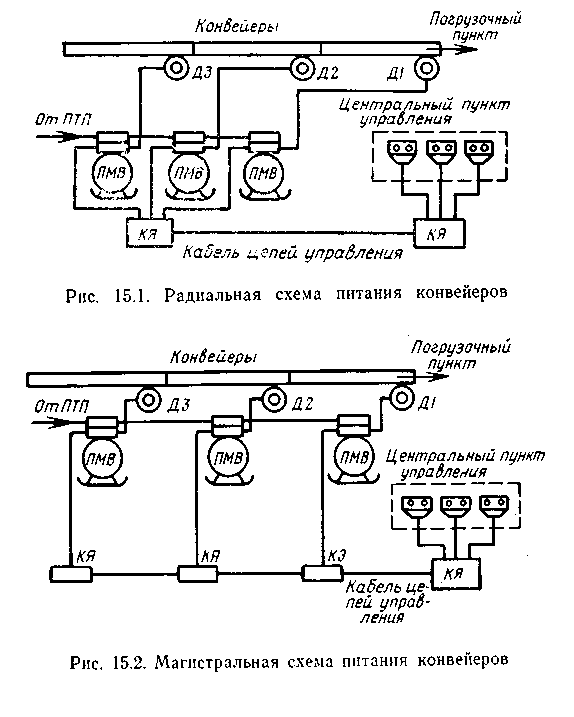
радиальная (рис. 15.1), когда к каждому электродвигателю прокладывается отдельный силовой кабель, а вся пусковая аппаратура сосредоточивается в одном месте — на распределительном пункте;
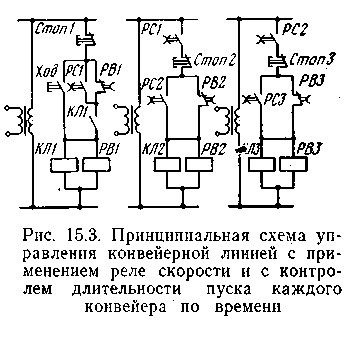
магистральная (рис. 15.2), когда пусковая аппаратура располагается непосредственно у приводных двигателей и питается от общего (магистрального) силового кабеля;
смешанная (радиально-магистральная), когда конвейерная линия разбивается на ряд групп. Группы питаются по радиальной схеме, а внутри каждой группы двигатели питаются по магистральной схеме.
Выбор той или другой схемы питания обусловливается технико-экономическими показателями.
Для управления, двигателями ленточных конвейеров применяются: магнитные пускатели типов П и ПМВ — для низковольтных электродвигателей, магнитные контакторы типа КТ и реверсоры типа РВМ — для высоковольтных двигателей.
Кроме этого применяется различная специальная аппаратура управления, контроля и защиты, кнопочные пункты управления, кабельные ящики КЯ-
В настоящее время на конвейерных установках применяется централизованное дистанционное управление.
Сущность дистанционного управления сводится к дистанционному включению магнитных пускателей и, следовательно, двигателей конвейеров. Такое управление осуществляется одним оператором с центрального пункта управления, связанного системой сигнализации и контроля со всеми управляемыми конвейерными установками, и называется централизованным (в отличие от местного управления, при котором пуск и остановка электродвигателей производятся непосредственно с рабочего места вблизи привода).
При автоматическом управлении запуск конвейерной линии производится оператором нажатием одной пусковой кнопки;
включение конвейеров в необходимой последовательности и контроль за их исправным состоянием осуществляются автоматически с помощью соответствующей аппаратуры.
На открытых разработках применяются схемы дистанционного управления различной сложности. Наиболее совершенными являются схемы управления конвейерными линиями с применением реле скорости, действующими от рабочего органа конвейера (ленты) и включающими каждый последующий конвейер только после того, как лента предыдущего конвейера достигнет номинальной скорости движения.
На рис. 15.3 приведена принципиальная схема управления конвейерной линией с применением реле скорости и с контролем длительности пуска каждого конвейера по времени.
При кратковременном нажатии на кнопку «Ход» на катушки контактора КЛ1 и реле времени РВ1 подается питание. Кнопка «Ход» шунтируется замыкающим контактом КЛ1 и размыкающим контактом РВ1
Таким образом, после пуска первого конвейера дальнейший пуск всех остальных конвейеров будет осуществляться автоматически в зависимости от скорости движения рабочих органов конвейеров.
Если по каким-либо причинам скорость рабочего органа какого-либо конвейера не достигает номинального значения и не замкнутся контакты его реле скорости PC, то размыкающий контакт соответствующего реле времени РВ разомкнётся и пуск конвейерной линии будет приостановлен.
Если во время нормальной работы конвейерной линии рабочий орган значительно снизит скорость или совсем остановится
(в результате пробуксовки или обрыва), то произойдет автоматическая остановка поврежденного конвейера и всех конвейеров, передающих груз на поврежденный конвейер, вследствие размыкания соответствующих контактов PC реле скорости.
Применение в схемах автоматизации конвейерных линий реле скорости позволило осуществлять последовательный пуск двигателей конвейерной линии, а также все необходимые блокировки в зависимости от вступления в работу контролируемого конвейера.