

5.5. Расчет пусковых и тормозных сопротивлений
Расчет пусковых и тормозных сопротивлений для двигателей с прямолинейными механическими характеристиками можно выполнять аналитическим, графическим и графоаналитическим методами.
Рассмотрим для примера графический метод расчета пусковых и тормозных сопротивлений для асинхронного двигателя с фазным ротором
Расчет этим методом припое (рис. 5.9):
1. Строят естественную механическую характеристику по двум точкам (ω=ωном и ω=ω0).
Определяют пусковой и переключающий моменты M1 и М2.
Строят пусковую диаграмму по точкам 1—7.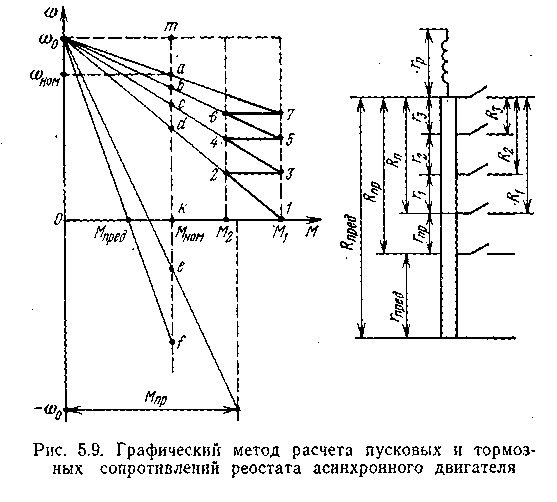
4. Определяют номинальное сопротивление ротора.
![]()
На рис. 5.9 отрезок mk пропорционален номинальному сопротивлению ротора R2ном, т. е
mk= R2ном
Отрезки ad, ас и ab (и т. д.) пропорциональны сопротивлениям первой, второй, третьей и т. д. ступеней пускового реостата R1 R2, R3 и т. д.

![]()
![]()
определяют допустимый тормозной момент и максимальную скорость ωпр≈ω0 (рис. 5.9, точка е);
проводят характеристику ступени противовключения;
определяют сопротивление ступени противовключения
![]()
Этот метод прост и дает достаточную для практических целей точность.
Глава 6
РЕГУЛИРОВАНИЕ СКОРОСТИ ЭЛЕКТРОПРИВОДА
6.1. Основные сведения о регулировании скорости электропривода
Регулированием скорости электропривода называют принудительное изменение скорости в зависимости от требований производственного процесса.
Основными показателями, характеризующими различные способы регулирования скорости двигателей, являются:
а) диапазон или пределы регулирования;
б) экономичность применения того или иного способа регулирования;
в) плавность регулирования;
г) стабильность работы на заданной скорости;
д) допустимая нагрузка.
Диапазон или предел регулирования скорости определяются отношением максимальной угловой скорости вращения к минимальной при моменте вращения на валу двигателя, равном номинальному, т. е.
![]()
![]()
где Р2 — мощность на валу двигателя; Δр — потери мощности в регулировочных устройствах и двигателе.
![]()
Плавность регулирования определяется количеством ступеней регулирования. Чем больше ступеней имеет регулировочное устройство (например, реостат), тем большую плавность можно получить.
Стабильность работы на заданной скорости характеризуется изменением угловой скорости при заданном отключении момента нагрузки и зависит от жесткости механической характеристики. Стабильность работы тем выше, чем больше жесткость механической характеристики.
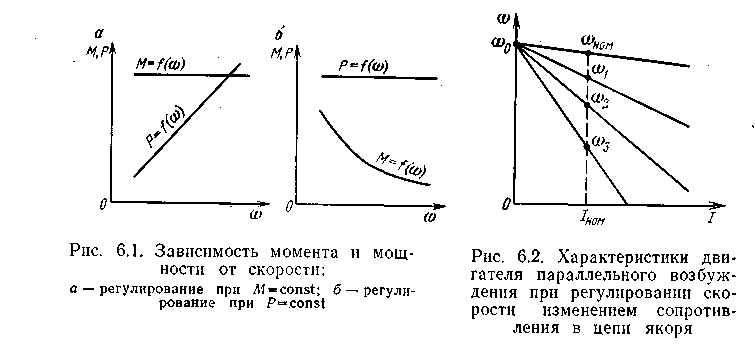
Допустимая нагрузка при регулировании скорости зависит от способа регулирования и определяется допустимым по условиям нагрева моментом. В этом отношении возможны две регулировочные характеристики: регулирование при постоянном моменте М = const и при постоянной мощности Р = const. Если двигатель имеет принудительную вентиляцию, то по условию допустимого нагрева двигатель может длительно работать с током нагрузки, равным номинальному, при любой скорости.
Мощность на валу двигателя будет изменяться пропорционально скорости:
![]()
При регулировании скорости изменением магнитного потока при постоянной величине тока якоря скорость изменяется обратно пропорционально магнитному потоку
![]()
![]()
Учитывая что
![]()
Мощность
![]()
Таким образом, регулирование скорости можно производить или при постоянном моменте М = const, или при постоянной мощности Р = const.
6.2. Регулирование скорости электродвигателей постоянного тока
Если обратиться к уравнению скоростной характеристики
![]()
Двигатели параллельного возбуждения. Регулирование скорости путем введения в цепь якоря дополнительного сопротивления (регулировочного реостата) является весьма простым. Скоростные характеристики двигателя при этом способе регулирования приведены на рис. 6.2. С увеличением сопротивления Rя скорость вращения уменьшается.
Недостатками этого способа регулирования являются:
а) значительные потери мощности при регулировании, которые пропорциональны изменению скорости;
б) уменьшение жесткости характеристик при увеличении сопротивления Rя, что уменьшает стабильность работы при малых скоростях;
в) уменьшение пределов регулирования с уменьшением на грузки на валу двигателя (при нагрузках, близких к нулю, регулирование практически невозможно).
Этот способ применяют в основном для кратковременного регулирования скорости.
Регулирование скорости двигателя параллельного возбуждения путем изменения магнитного потока Ф производится при помощи реостата, включенного в цепь обмотки возбуждения.
Так как магнитный поток Ф = iв, то изменением сопротивления регулировочного реостата можно изменять магнитный поток Ф, изменяя ток возбуждения iB.
С уменьшением магнитного потока Ф скорость увеличивается и наоборот. Но электрические машины нормального исполнения рассчитывают так, что их магнитная система в номинальном режиме работы насыщена, поэтому увеличение тока возбуждения не вызывает заметного увеличения потока, а следовательно, и снижения скорости. Ввиду этого этот способ регулирования применим только для регулирования скорости выше номинальной.
Скоростные характеристики при изменении!! магнитного потока приведены на рис. 6.3, а. Все характеристики при со = 0 сходятся в одной точке на оси абсцисс. Эта точка соответствует току короткого замыкания.
Взаимное расположение механических характеристик при регулировании скорости изменением потока Ф несколько отличается от расположения скоростных характеристик. При уменьшении Ф с увеличением скорости идеального хода со0 уменьшается величина момента короткого замыкания, поэтому механические характеристики принимают вид, показанный на рис. 6.3, б.
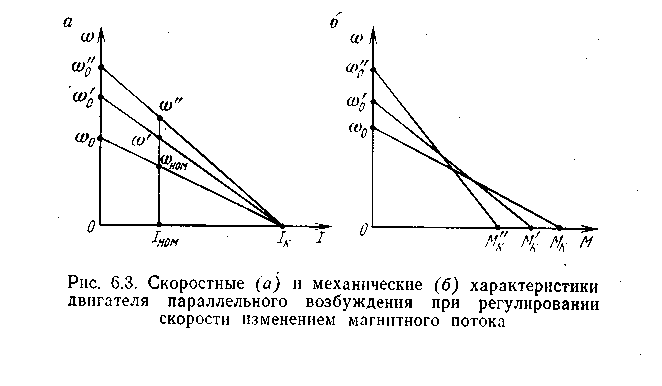
Регулирование скорости изменением магнитного потока является экономичным, так как ток возбуждения двигателя составляет 1 —10 % номинального тока якоря.
Регулирование скорости при помощи изменения напряжения, подведенного к якорю возможно при питании двигателя от отдельного регулируемого источника постоянного тока. Для получения постоянного магнитного потока обмотку возбуждения двигателя подключают к другому источнику тока — возбудителю. Схемы и способы регулирования скорости этим способом подробно освещены в главе 7.
Двигатели последовательного возбуждения. Для двигателей последовательного возбуждения возможны также способы регулирования скорости, что и для двигателей параллельного возбуждения.
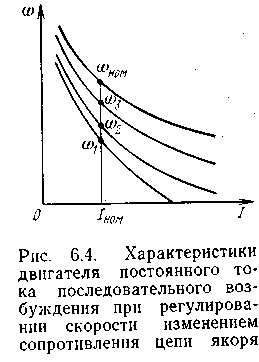
При увеличении сопротивления в цепи якоря (путем включения последовательно с ним регулировочного реостата) скорость якоря будет уменьшаться. Скоростные характеристики при таком регулировании скорости приведены на рис. 6.4. Жесткость характеристики уменьшается с увеличением сопротивления.
Недостатки этого способа регулирования были отмечены выше, при рассмотрении регулирования скорости двигателя параллельного возбуждения. Несмотря на большие потери мощности при регулировании и другие недостатки, тот способ применяют на электровозах, кранах и других установках.
![]()
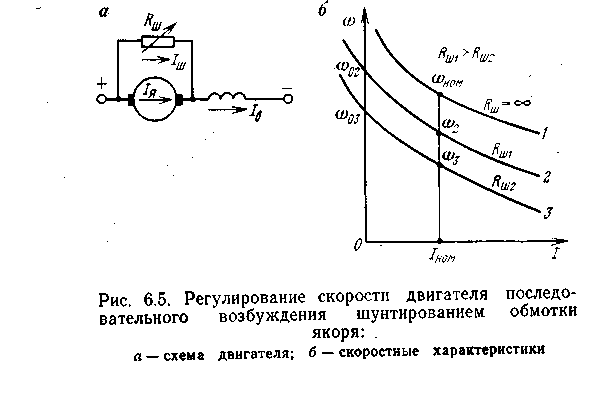
С увеличением сопротивления Rш ток Iш уменьшается, следовательно, уменьшается и ток Iв, а скорость возрастает. При Ri = ∞ получаем естественную характеристику 1 (рис. 6.5, б). Если сопротивление Rш уменьшать, то токи Iш и Iв будут увеличиваться, а скорость уменьшаться. Получим искусственные характеристики 2 и 3. При таком включении реостата при холостом ходе двигателя, т. е. при Iя = 0, скорость вращения якоря будет конечной, так как Iв =Iш≠0. Этим способом можно регулировать скорость ниже номинальной.
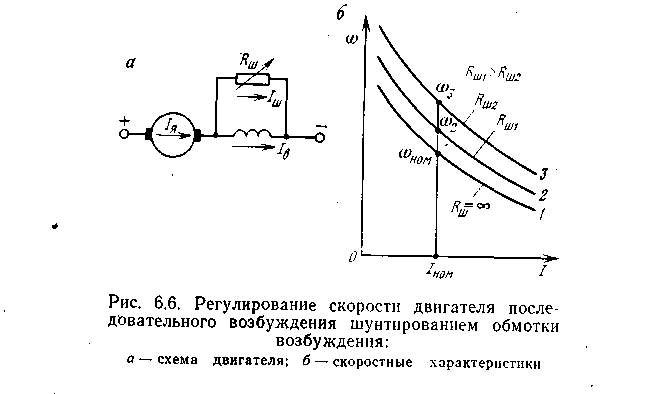
На рис. 6.6, a приведена схема шунтирования сопротивлением обмотки возбуждения и скоростные характеристики, получаемые при таком регулировании.
В этом случае ток возбуждения Iв = Iя-Iш
С увеличением сопротивления Rш ток Iш уменьшается, при Rш = ∞ Iш = 0 и Iв = Iя. При этом получаем естественную характеристику 1 (рис. 6.6, б). С уменьшением Rш увеличивается ток Iш, уменьшается ток возбуждения Iв, а скорость возрастает. Получаем искусственные характеристики 2 и 3. Этим способом возможно регулирование скорости выше номинальной.
Пределы регулирования скорости при шунтировании обмотки якоря достигают (4—5) : 1, а при шунтировании обмотки возбуждения — 2:1.
Регулирование скорости изменением подводимого напряжения применяется на электровозах путем переключения двигателей с последовательного соединения на параллельное.