

Глава 12
ЭЛЕКТРОПРИВОД И ЭЛЕКТРООБОРУДОВАНИЕ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ
12.1. Общие сведения
Одной из основных машин на открытых горных разработках является одноковшовый экскаватор.
Для вскрытия и добычи полезного ископаемого при погрузке породы, угля и руды в железнодорожные вагоны и автосамосвалы применяются одноковшовые электрические экскаваторы с оборудованием механической лопаты с ковшом емкостью от 3 до 35 м3. Основными машинами этого типа являются экскаваторы ЭКГ-4,6, ЭКГ-8И, ЭКГ-12,5. При бестранспортной системе вскрытия и для проходки траншей применяются шагающие драглайны с ковшом емкостью от 5 до 100 м3. К этому типу экскаваторов относятся ЭШ-5/45М, ЭШ-10/70А, ЭШ-15/90А, ЭШ-25/100, ЭШ-100/100. Наряду с мощными экскаваторами находят применение и экскаваторы с ковшами емкостью 0,5—2 м3. Они служат для селективной выемки полезного ископаемого, применяются на вспомогательных и строительных работах.
Карьерные одноковшовые экскаваторы являются сложными машинами, имеющими несколько главных и вспомогательных механизмов. Электрическое оборудование экскаваторов является также довольно сложным вследствие высокого технического уровня применяемых электроприводов.
12.2. Рабочие режимы электроприводов экскаваторов
Работа экскаватора характеризуется в основном двумя следующими друг за другом процессами: копания (черпания) и поворота экскаватора в обоих направлениях. Процессы эти, чередуясь, следуют один за другим и в целом работа экскаватора протекает циклически.
Полный цикл выемки (черпания) и разгрузки осуществляется тремя рабочими механизмами: подъемным, напорным и поворотным у экскаватора с оборудованием механической лопаты и тяги, подъемным и поворотным — у драглайна. Для разгрузки ковша на экскаваторе-лопате имеются специальный привод и механизм открывания днища.
Рабочий цикл экскаватора состоит из следующих основных элементов: копание, подъем ковша и одновременный поворот на выгрузку, разгрузка ковша, поворот к месту копания и одновременное опускание ковша в забой.
Изменения вращающего момента и частоты вращения электродвигателей графически изображаются в виде так называемых нагрузочных диаграмм. Изучение нагрузочных диаграмм позволяет установить сущность работы экскаватора и способствует совершенствованию приемов управления машиной.

На рис. 12.1 представлены расчетные нагрузочные диаграммы механизмов экскаватора с оборудованием механической лопаты. На рис. 12,1, а сплошной линией показана нагрузочная диаграмма подъемного механизма за один цикл. Пунктирной линией показана диаграмма частоты вращения подъемного двигателя. Работу подъемного механизма за один цикл экскавации можно разбить на следующие рабочие периоды: t1 — копание; t2 — подъем груженого ковша и равновесное удержание его на определенной высоте при повороте платформы экскаватора на разгрузку; t3— разгрузка; t4 — равновесное состояние порожнего ковша во время поворота к месту копания после разгрузки; t5 — опускание порожнего ковша с применением торможения.
На рис. 12.1, б представлены диаграммы поворотного механизма за один рабочий цикл. Здесь имеют место следующие рабочие периоды: t6 — разгон и торможение поворотной платформы с груженым ковшом; t7 — разгон и торможение поворотной платформы с порожним ковшом. Длительность поворотных движений составляет до 70—80 % общего времени цикла, т. е. определяет собой в значительной мере производительность экскаватора.
На рис. 12.1, в представлены диаграммы напорного механизма за один цикл. Рабочий цикл привода напора состоит из следующих периодов: t8 — напор при копании; t9 — возврат рукояти с груженым ковшом назад; t10— перемещение рукояти с груженым ковшом вперед при повороте на разгрузку; t11 — вытягивание рукояти при подаче порожнего ковша в забой.
Приведенные нагрузочные диаграммы основных рабочих механизмов построены на основании теоретических расчетов. Хотя действительная нагрузка механизмов несколько отличается от теоретической (расчетной) вследствие изменения сопротивления грунта и других факторов, общий характер нагрузочных диаграмм остается примерно таким же, какой представлен на рис. 12.1.
Как видно из рассмотренных выше диаграмм, режим работы основных механизмов одноковшового экскаватора характеризуется частыми пусками и реверсами, быстрыми разгонами и остановками. Частота включений подъемного двигателя доходит до 300 в час, а напорного и поворотного — до 700 в час.
Работа драглайна характеризуется следующими друг за другом процессами: черпанием (заполнением ковша грунтом), подъемом груженого ковша и поворотом к месту разгрузки, разгрузкой ковша, поворотом к забою и установкой ковша для нового черпания.
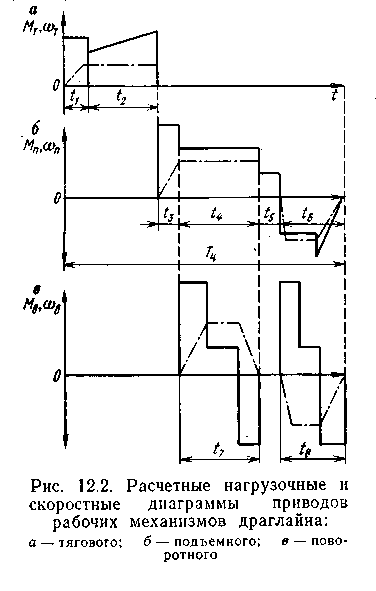
На рис. 12.2 представлены теоретические (расчетные) нагрузочные и скоростные характеристики приводов рабочих механизмов драглайна.
Работу механизма тяги (рис. 12.2, а) можно разбить на следующие основные рабочие периоды: t1 — внедрение ковша в грунт; t2 — черпание.
На рис. 12,2, б представлены диаграммы подъемного механизма. Здесь имеют место следующие рабочие периоды: t3 — отрыв ковша от грунта; t4 — подъем ковша с одновременным поворотом экскаватора на разгрузку; U — разгрузка ковша; t6 — опускание порожнего ковша с одновременным поворотом к забою.
Для поворотного механизма (рис. 12.2, в) следует выделить два основных периода: t7 — поворот груженого ковша к месту разгрузки; t8 — поворот порожнего ковша к месту черпания.
Как и для экскаватора с оборудованием механической лопаты, режим работы основных механизмов драглайна характеризуется быстрыми разгонами и остановками, частыми пусками и реверсами.
12.3. Требования, предъявляемые к электроприводам и электрооборудованию экскаваторов
Работа электроприводов основных рабочих механизмов экскаватора характеризуется большой частотой включений, резкими изменениями нагрузки, частыми изменениями направления вращения (реверсированием). Поэтому к электроприводу экскаватора предъявляются особые требования. Например, наиболее характерной особенностью работы механизма напора, как иногда и механизма подъема, является возможность его вынужденной остановки во время работы в случае встречи ковша с непреодолимым препятствием. Такой режим называется работой на упор или стопорением. Следовательно, для обеспечения надежной и безаварийной работы главного рабочего механизма требуются снижение момента (нагрузки) до допускаемых пределов при стопорении и «мягкость» характеристики его приводного двигателя, с тем, чтобы частота вращения двигателя могла быть автоматически замедлена (иногда до нуля) при достаточно большом увеличении нагрузки. Это требование является основным и предъявляется к электроприводам главных механизмов экскаваторов.
С другой стороны, для сохранения нормальной производительности экскаватора частота вращения двигателя с увеличением момента должна мало меняться.
Автоматическое изменение частоты вращения двигателя в зависимости от момента осуществляется по так называемой экскаваторной характеристике.
В экскаваторных характеристиках с увеличением нагрузки угловая скорость двигателя вначале изменяется мало, а затем резко падает. При достижении максимально допустимого для данного механизма момента двигатель останавливается. Такой режим работы предохраняет двигатели главных приводов от перегрузок, толчков и ударов.
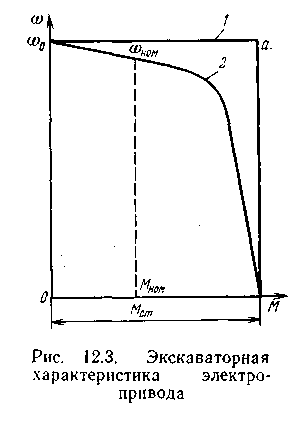
Форма экскаваторной характеристики электропривода должна быть такой, чтобы при рабочих нагрузках обеспечивалась высокая производительность механизма с ограничением момента допустимыми значениями при возможных перегрузках (рис. 12.3).
Привод, обладающий характеристикой 1, обеспечит наибольшую производительность машины. Однако характеристика 2 обеспечивает возможность своевременно снизить нагрузку механизма при перегрузке двигателя и избежать полной остановки.
Качество экскаваторной характеристики определяется коэффициентом заполнения, который представляет собой отношение площади, образованной кривойω = f(M)
площади прямоугольника Оω0аМст. Чем ближе этот коэффициент к единице, тем большую производительность экскаватора может обеспечить привод. Следует также отметить особые условия, в которых протекает работа приводов экскаватора. Экскаваторы работают на открытом воздухе, поэтому в кузов и корпуса отдельных машин и аппаратов проникают пыль, грязь, влага и снег. Экскаватор, а следовательно, и все смонтированное на нем оборудование подвергаются механическим воздействиям, возникающим вследствие различных препятствий при копании грунта, колебаний и вибраций отдельных частей экскаватора.
Вследствие тяжелых условий работы экскаватора должны быть предъявлены особые требования к механической и электрической прочности и конструктивной надежности всего электрического оборудования.
В заключение следует отметить, что двигатели, устанавливаемые на экскаваторах, предназначены для повторно-кратковременного режима работы, т. е. для работы с частым чередованием периодов включения и выключения. Однако обычные крановые двигатели, рассчитанные на работу в повторно-кратковременных режимах, имеют слишком малую нормированную продолжительность включения (15, 25 и 40 %). В условиях работы одноковшовых экскаваторов продолжительность включения двигателей бывает значительно выше (50—80 %), поэтому для экскаваторов изготовляют двигатели специального экскаваторного типа, отличающиеся особенно высокой электрической и механической прочностью.