

3.3. Механические характеристики трехфазных асинхронных двигателей
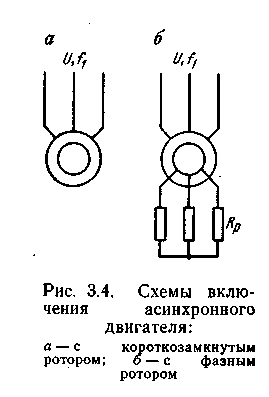
Асинхронные двигатели трехфазного тока получили широкое применение в промышленности. Они отличаются простотой конструкции, высокой надежностью (особенно двигатели с короткозамкнутым ротором), хорошими эксплуатационными качествами. Схемы включения асинхронных двигателей приведены на рис. 3.4.
Электромагнитный момент создается за счет взаимодействия вращающегося магнитного поля Ф статора с активной составляющей тока ротора I pа
![]()
где с — коэффициент пропорциональности; ψp — угол сдвига фаз между током и э. д. с. ротора.
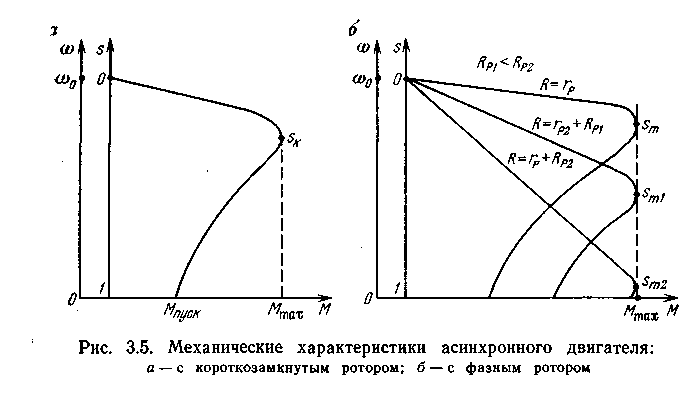
При Ф = const момент определяется величиной Iр. а, которая является функцией скольжения s. При изменении скольжения изменяется э. д. с, частота тока и индуктивное сопротивление обмотки ротора. При малых скольжениях индуктивное сопротивление обмотки мало и ψp ≈ 0, поэтому при увеличении нагрузки на валу момент возрастает пропорционально току ротора. При некотором значении скольжения Sк активная составляющая тока ротора IР. а и момент на валу Мк будут максимальными. Скольжение sк и момент Мк при этом скольжении называются критическими.
При дальнейшем увеличении скольжения IР. а и М будут уменьшаться, хотя полный ток ротора и статора увеличивается. Причиной этого является увеличение индуктивного сопротивления обмотки ротора и, следовательно, увеличение угла сдвига фаз ψр.
Механическая характеристика асинхронного двигателя М=f(s) определяется уравнением

где Мк и sK — критические момент и скольжение.
В расчетах обычно пользуются зависимостью ω = f(М). Переход от скольжения к частоте вращения ω производится по уравнению
![]()
где ω — синхронная частота вращения магнитного поля статора.
На рис. 3.5, а представлена механическая характеристика асинхронного двигателя с короткозамкнутым ротором.
<о0
Для двигателей с фазным ротором с помощью дополнительного сопротивления Rя, введенного в цепь обмотки ротора, можно получить семейство искусственных механических характеристик.
![]()
где sном — номинальное скольжение.
На рис. 3.5, б представлены механические характеристики двигателя с фазным ротором при различных значениях Rр
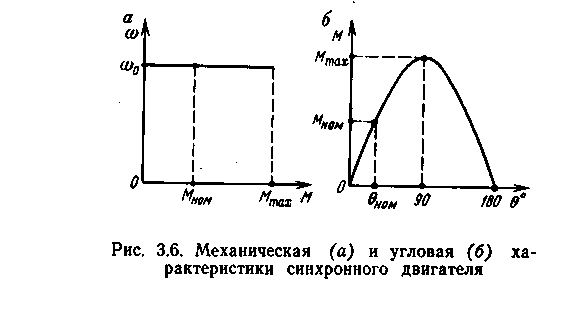
3.4. Механическая и угловая характеристики синхронных двигателей
Скорость вращения синхронного двигателя при работе в установившемся режиме независимо от нагрузки на валу остается строго постоянной (при неизменной частоте тока) и равна синхронной скорости, рад/с
![]()
Однако при пульсации нагрузки на валу двигателя в установившемся режиме имеют место колебания мгновенной скорости вследствие изменения угла θ между напряжением и э. д. с. синхронной машины.
Эти колебания оказывают существенное влияние при работе синхронного двигателя на пульсирующую нагрузку, например на поршневой компрессор. В этих случаях для решения вопроса о поведении двигателя важно знать зависимость между моментом М и углом θ.
Момент вращения синхронного двигателя определяется выражением

![]()
где Мтах — максимальный момент двигателя, определяемый при sin θ=1 по выражению
![]()
Синхронные двигатели широко применяют в горной промышленности для приводов компрессоров, вентиляторов и преобразовательных агрегатов подъемных установок и экскаваторов.
Основным преимуществом синхронных двигателей является высокий коэффициент мощности. Они могут работать с опережающим cos φ и этим повышать общий средневзвешенный коэффициент мощности предприятия.