

13.2. Рабочие режимы электроприводов и способы питания многоковшовых экскаваторов
Знание рабочих режимов и нагрузочных диаграмм имеет большое значение при проектировании электропривода. Они позволяют правильно определить мощность электропривода и его перегрузочную способность, установить необходимые пределы регулирования скорости, правильно выбрать защиту двигателя и решить ряд других важных вопросов.
Главным электроприводом на многоковшовых экскаваторах является привод ковшовой цепи или ротора. Рассмотрим сначала электропривод ковшовой цепи с точки зрения режима его работы.
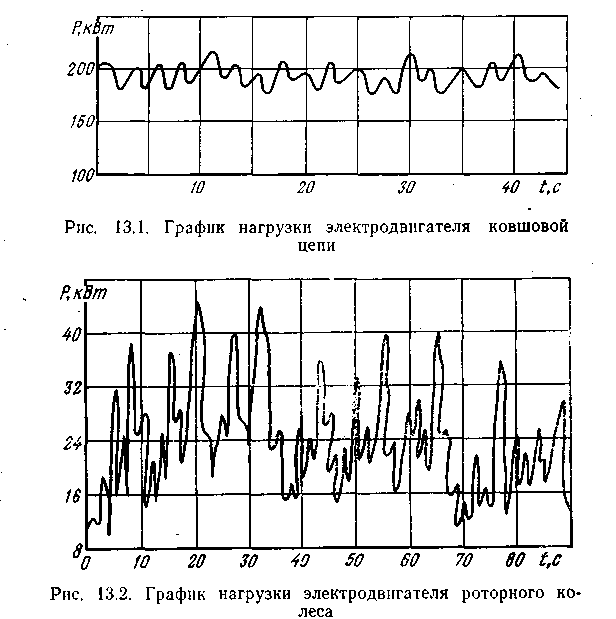
Режим нагрузки электропривода ковшовой цепи неравномерный и зависит от крепости полезного ископаемого или породы, толщины снимаемой стружки и т. п. Кроме того неравномерность нагрузки в большой степени обусловливается многогранной формой ведущего барабана ковшовой цепи. График нагрузки двигателя при мягких породах представлен на рис. 13.1. Как видно из диаграммы, пики нагрузки возникают при каждом врезании ковшей в грунт, а провалы — при каждом их опрокидывании на приводном барабане.
Режимы работы и нагрузки электропривода роторного колеса мало отличаются от описанного выше режима электропривода ковшовой цепи. Меньшие маховые массы и небольшое количество ковшей, одновременно отделяющих грунт от целика обусловливают лишь более резкие пики потребляемой мощности. На рис. 13.2 представлен график нагрузки электропривода роторного колеса при черпании вязких глин.
Электропривод ходового механизма работает в длительном режиме с переменной пиковой нагрузкой. Нагрузка определяется состоянием и уклонами пути, направлением и силой ветра и боковыми нагрузками, действующими на ковшовую раму.
Режим работы и нагрузка электроприводов механизма поворота, конвейеров, подъемной лебедки и вспомогательных механизмов многоковшовых экскаваторов мало отличаются от режимов аналогичных механизмов других горных машин.
Многоковшовые экскаваторы питаются энергией от карьерных распределительных сетей напряжением 6 или 10 кВ, экскаваторы малой производительности — от сетей напряжением 380—660 В. Способ подвода энергии к многоковшовым экскаваторам зависит от вида ходового оборудования. К экскаваторам на железнодорожном ходу энергия подводится по гибкому кабелю, укладываемому на специальный кабельный барабан;
к экскаваторам на гусеничном ходу — посредством гибкого, волочащегося кабеля (или наматываемого на кабельный барабан), длина которого составляет 500—600 м и более.
13.3. Требования, предъявляемые к электроприводам и электрооборудованию многоковшовых экскаваторов
Помимо требований, обусловленных работой электрооборудования многоковшовых экскаваторов в условиях открытых горных разработок, к последнему предъявляется ряд дополнительных требований, обусловленных характером работы того или иного механизма.
Для электропривода ковшовой цепи (или роторного колеса) характерным являются значительные колебания нагрузки, достигающие при нормальном режиме 1,5-кратной номинальной величины. Следовательно, двигатель привода ковшовой цепи должен обладать повышенной перегрузочной способностью для преодоления кратковременных пиков нагрузки. Кроме того, привод ковшовой цепи (или роторного колеса) должен обеспечивать:
достаточный пусковой момент, необходимый для преодоления больших динамических и статических сопротивлений, возникающих при перемещении массивного рабочего органа;
плавный многоступенчатый пуск, при котором ускорения и моменты не оказывают вредного влияния на металлоконструкции рабочего органа экскаватора;
электрическую и механическую защиты привода от перегрузок, срабатывающие при нагрузке, равной 1,5—1,7 номинальной.
Требованиям указанного режима работы удовлетворяют асинхронный двигатель с короткозамкнутым ротором или система Г—Д. Реже для привода роторного колеса применяется асинхронный двигатель с фазным ротором.
Электропривод механизмов хода многоковшовых экскаваторов работает как в нормальном, длительном режиме, так и в режиме «угона». В рабочем режиме во время черпания экскаваторы передвигаются со скоростью 3—8 м/мин, а в режиме «угона» во время аварийных перегонов (при обвалах, оползнях, затоплениях уступа) скорость равна 8—15 м/мин.
К электроприводу механизма хода предъявляются следующие требования:
плавность пуска и изменения скорости движения в переходных режимах с ускорениями, не превышающими 0,07—0,15 м/с2 (с целью исключить опасные перенапряжения в металлоконструкциях экскаватора, особенно при значительной его высоте) ;
устойчивое регулирование скорости движения экскаватора в пределах 20—120 % номинальной скорости;
независимость скорости хода экскаватора от нагрузки;
автоматическое изменение частоты вращения привода вслед за изменением линейной скорости ходовых колес тележек экскаватора, движущихся по кривым разных радиусов, и защита от перегрузок;
возможность электрического торможения (с использованием механических тормозов лишь при полной остановке).
Этим требованиям наиболее полно удовлетворяет электропривод по системе Г—Д, который и применяется на мощных экскаваторах. На малых и средних машинах наибольшее распространение получили асинхронные двигатели.
На конвейерах и других вспомогательных механизмах многоковшового экскаватора применяют асинхронные двигатели с короткозамкнутым ротором. Только для плавного разгона мощных конвейерных установок значительной длины на погрузочных и роторных стрелах применяют двигатели с фазным ротором.
Ввиду определенных технологических связей отдельных механизмов многоковшового экскаватора должна быть предусмотрена блокировка электроприводов этих механизмов, обеспечивающая определенную последовательность пуска и остановки механизмов.
Для раздельного включения механизмов (например, при наладочных работах, осмотрах, ремонтах, опробовании и т. д.) блокировка должна сниматься при помощи специально предусмотренных ключей.