

2.9.1 Розрахунок контурних поверхонь контакту
„”В ряді сучасних досліджень розглянуто стиснення пружних тіл при наявності тертя між ними. Між тим, правильніше було б при розв’язанні контактної задачі враховувати мікроструктуру поверхні стиснених тіл”. Ці думки належать крупному радянському механіку І. Я. Штаєрману (1949 р.). Ним же вперше було отримано рівняння плоскої задачі для пружного тіла, на поверхні якого знаходиться шар, наділений специфічними властивостями. Планувалось, що окрім звичайних пружних переміщень, зумовлених деформаціями всередині тіла, точка, яка лежить на границі пружної напівплощини, здійснює доповнююче переміщення, що виникає завдяки чисто місцевим деформаціям поверхні, яке наперед визначене поверхневою структурою даного пружного тіла. Ці деформації пропорційні тиску.
Б. П. Митрофанов, втілюючи ці ідеї, вирішив вісесиметричну контактну задачу про пружне вдавлювання сфери у напівпростір з граничним шорстким шаром. Рішення задачі можна привести до рівняння:
![]() ,
,
де ![]() - область кола дотику;
- область кола дотику; ![]() - тиск в області
- тиск в області ![]() ;
;
![]() - зближення контактуючих тіл;
- зближення контактуючих тіл; ![]() - коефіцієнт, що характеризує деформаційні
властивості шорсткого шару;
- коефіцієнт, що характеризує деформаційні
властивості шорсткого шару;
![]() - функція, що залежить від
геометрії обрису контактуючих тіл;
- функція, що залежить від
геометрії обрису контактуючих тіл;
![]()
Результати чисельних рішень цього рівняння для контакту жорсткої поверхні з шорстким напівпростором представлено на рис. 16
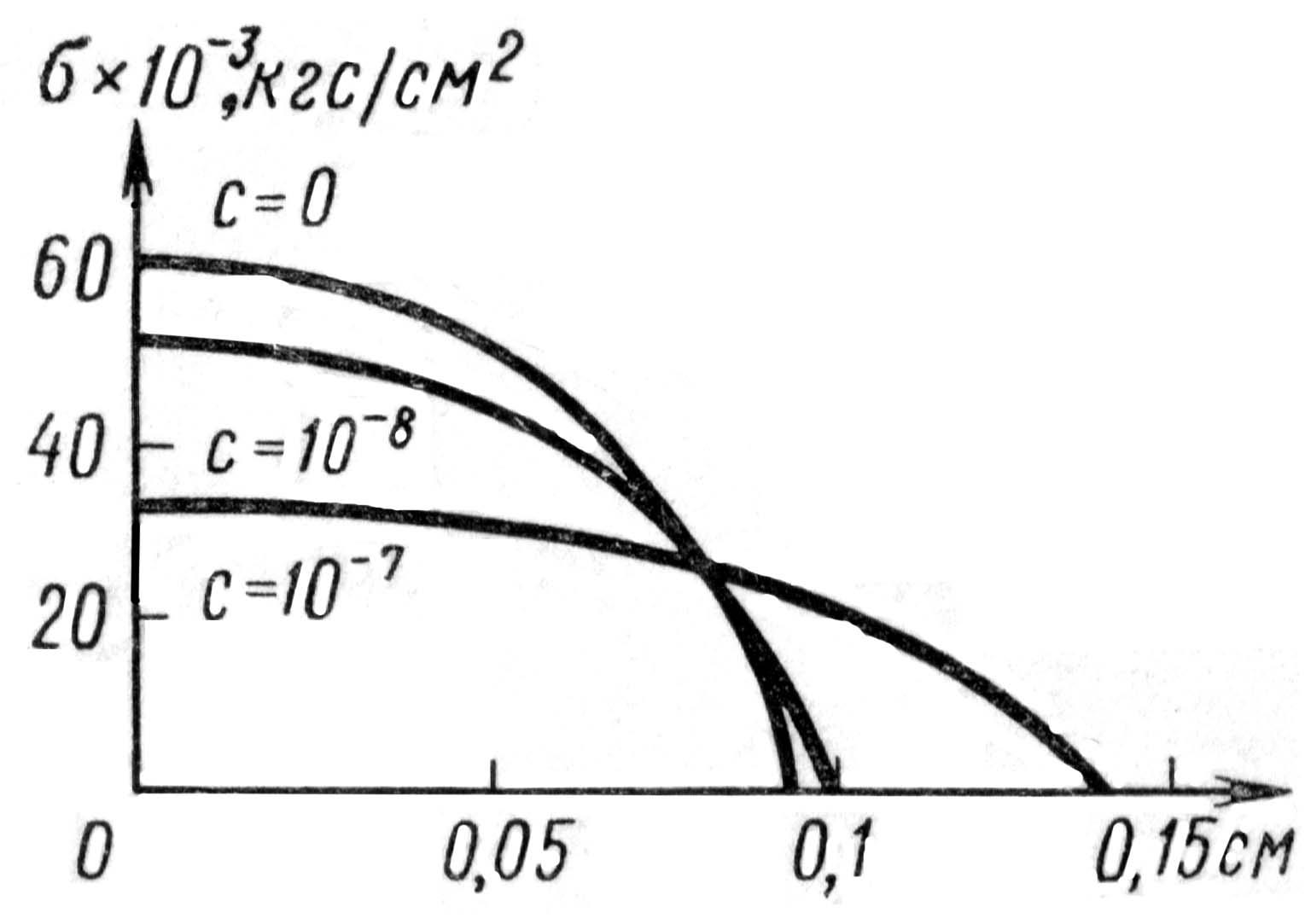
Рис. 16. Епюри розподілення тиску при контакті жорсткої сфери з пружнім напівпростором, що несе на собі пружний шорсткий шар.
Випадок, коли С=0, відповідає рішенню Герца для ідеально гладких поверхонь. Зі зростанням С збільшується роль шорсткого шару в процесі формування ФПК , яка зводиться до збільшення її розмірів та зниження величини максимального тиску в центрі площадки. Якщо оцінювати ступінь рівномірності розподілення тиску співвідношенням між максимальною величиною та середнім значенням, то врахування шорсткості призведе до зростання цього співвідношення, тобто зниження рівномірності епюри тиску.
В такому випадку ці задачі мають безпосереднє відношення до розрахунку контурних площ дотику.
В залежності від співвідношення між характеристиками мікрогеометрії та хвилястості поверхонь можна розглянути три різних механізми формування контурної площі контакту.
Якщо висота хвилі HХВ співмірна з висотою шорсткості, то контурна площа утворюється, власне, в результаті деформації хвиль та шорсткості на цих хвилях. Саме цей випадок представляє найбільш практичний інтерес. При цьому хвилі завжди деформуються пружно, а на мікронерівностях крім пружних можуть розвиватися ще й пластичні деформації. Якщо висота хвилі значно перевищує висоту шорсткості, то ріст контурної площі контакту з навантаженням відбувається за рахунок звичайної деформації хвиль, тобто при розрахунку контурних площ їх можна приймати гладкими. Якщо ж висота хвиль значно менше висоти шорсткості, то їх деформацією можна знехтувати, у порівнянні з деформацією мікро нерівностей, і вважати жорсткими. Приналежність до одного з цих механізмів оцінюється критерієм λ (лямбда), який у випадку пружних деформацій мікронерівностей розраховується за формулою
 ,
(44)
,
(44)
а при пластичному контакті
 (45)
(45)
При ![]() реалізується ІІ механізм, при
реалізується ІІ механізм, при ![]() - третій, а при проміжних значеннях
- третій, а при проміжних значеннях ![]() - І механізм.
- І механізм.
Експерименти проведені А. А. Ланковим показують, що контурні площі контакта шорсткої сфери з плоскою гладкою поверхнею завжди більше тієї, яку пророкує теорія Герца, при цьому розходженні тим більше, чим менше навантаження і більш груба поверхня сфери. Співвідношення між цими площами згідно дослідам Ел-Ріфая і Хеллинга залежить від відношення висоти нерівностей до величини пружного зближення тіл. Особливо велике це відношення, а звідси й різниця між площами для високо модульних матеріалів при відносно невеликих навантаженнях.
А. А. Ланков виконав розрахунок контурної площі контакту, припускаючи, що закон розподілу контурного тиску такий, що і в рішенні Герца, а збільшення площі контакту здійснюється за рахунок зниження максимального тиску в центрі контурної площадки. В такій постановці задачі процедура розрахунків значно спрощується.
Для запобігання громіздкого викладення, розглянемо випадок жорсткої і гладкої сфери радіуса R і шорсткого пружного напівпростору, припускаючи, що епюра тиску відрізняється по формі від рішення Герца, а кінцевий результат розповсюджений на випадок двох пружних шорстких сфер.

Мал.17. Контакт жорсткої сфери з шершавим напівпростором.
Розрахункова схема показана на малюнку. Штриховою лінією 3-3 показано положення сфери і шершавого напівпростору до навантаження. Шершавий шар укладається між лініями 1-1 і 2-2. Після прикладання стискаючого навантаження N вийде впровадження сфери в пружний на півпростір. Взаємне положення тіл під навантаженням зображено безперервною лінією.
Для того, щоб сфера зайняла положення 4-4 вздовж кожної лінії, яка проходить паралельно вісі Z на відстані а від неї, повинно виконуватись співвідношення:
![]() ,
де (46)
,
де (46)
- глибина впровадження сфери;
n, c – переміщення точок, які розміщувались на верхній межі на півпростору й шершавого шару відповідно;
z0 – первісний зазор між поверхнею сфери і шершавим шаром по лінії М1М2
З геометричних міркувань:
![]() (47)
(47)
Як виходить з виразу (12), переміщення шершавого шару може бути описано співвідношенням:
![]() ,
(48)
,
(48)
де ![]() і
і  .
.
Виходячи з теорії пружності, запишемо:
![]()
![]() (49)
(49)
Тоді з врахуванням (47), (48) і (49) вираз (46) прийме вигляд:
![]()
![]() .
(50)
.
(50)
Таким чином, розв’язання сформульованої задачі зведено до нелінійного інтегрального рівняння. Для ідеально рівної поверхні С1=0 і розв’язуванням рівняння буде:
![]() (51)
(51)
З іншої сторони, для випадку абсолютно жорсткого на півпростору:
![]() (52)
(52)
Співставлення (51) і (52), які відповідають двом межовим випадкам розглядаємої задачі, будемо шукати рішення ( ) у вигляді:
![]() ;
;
![]()
З умови рівноваги:
![]()
виходить, що:
![]()
Для визначення треба знати вплив навантаження N на величину тиску p0. Рівняння вирішується чисельним методом і є громіздким, так як повинні бути враховані конкретні геометричні, фізичні параметри.
Визначення контурних площ контакту можна зробити по емпіричним співвідношенням.
Якщо з збільшенням навантаження кількість контактуючих хвиль змінюється, тобто вершини їх знаходяться на різних рівнях, то контурну площу належить розраховувати по формулі:
 (53)
(53)
де ,
![]() -
коефіцієнти, які залежать від розподілення
хвиль по висоті; К,
- коефіцієнти, які враховують вплив
шершавості на деформацію хвиль (див.
табл.).
-
коефіцієнти, які залежать від розподілення
хвиль по висоті; К,
- коефіцієнти, які враховують вплив
шершавості на деформацію хвиль (див.
табл.).
Таблиця. Значення коефіцієнтів К,
-
Вид деформації мікровиступів

Коефіцієнти

0,1
0,2
0,4
0,8
1,6
3,2
Пластична
50
К1
1,05
1,15
1,20
1,35
1,55
2,10
1
0,60
0,70
0,85
1,15
1,50
2,00
К2
0,95
0,90
0,85
0,85
1,10
1,53
2
0,70
1,05
1,45
2,15
3,05
3,90
100
К1
1,10
1,17
1,28
1,45
1,75
2,60
1
0,65
0,80
1,10
1,30
1,65
2,00
К2
0,95
0,88
0,85
0,90
1,20
2,10
2
0,75
1,10
1,60
2,40
3,40
4,00
150
К1
1,13
1,20
1,35
1,55
2,10
3,30
1
0,70
0,85
1,10
1,50
2,35
2,00
К2
0,90
0,85
0,85
0,93
1,35
2,50
2
0,80
1,20
1,70
2,60
3,60
4,00
Пружна
К1
1,05
1,06
1,14
1,25
1,50
2,10
1
0,65
0,80
1,05
1,40
1,95
2,40
К2
0,88
0,85
0,80
0,85
1,10
1,80
2
0,75
1,10
1,70
2,60
3,60
4,50
В таблиці: К1, 1 відповідає контакту шершавої поверхні з гладкою; К2, 2 – контакту двох шершавих поверхонь.
При розрахунках по формулі
(53) приймають при контакті хвилястої
поверхні з рівною ![]() =1,8,
=2,
а при контакті двох хвилястих поверхонь
=1,8,
=2,
а при контакті двох хвилястих поверхонь
![]() =2,4,
=3.
Треба мати на увазі, що немає необхідності
дуже точно визначати розміри контурної
площі контакту, оскільки фактична площа
контакту, фактичний тиск і інші
характеристики фрикційного контакту
залежать від контурного тиску в степені,
істотно меншої від 1.
=2,4,
=3.
Треба мати на увазі, що немає необхідності
дуже точно визначати розміри контурної
площі контакту, оскільки фактична площа
контакту, фактичний тиск і інші
характеристики фрикційного контакту
залежать від контурного тиску в степені,
істотно меншої від 1.
Для спряжень, до яких відносять зубчаті передачі, підшипники кочення і ковзання, криволінійні напрямні, кулачкові механізми і багато інших тиск pa на 2-3 порядки більше, ніж для першого виду спряжень. Цьому тиску відповідає значення , близьке до 0,5, що дозволяє при розрахунках контурних площ контактів нехтувати шершавістю.
Для розрахунку контурних площ контактів двох хвилястих поверхонь (сферичні хвилі) використовують наступні формули:
![]() ,
(54)
,
(54)
де  ;
k=0,220,29
- величина, залежна від коефіцієнта
заповнення профілю хвилями; Нв1,
Нв2
- висота хвиль;
;
k=0,220,29
- величина, залежна від коефіцієнта
заповнення профілю хвилями; Нв1,
Нв2
- висота хвиль;
 ,
,
де Rв1 Rв2 - радіуси сферичних хвиль.
У випадку циліндричних хвиль контурний тиск визначають по формулі:
 .
(55)
.
(55)
Для III-го механізму формування контурних площ контакту запропонована наступна розрахункова залежність:
 .
(56)
.
(56)
де - параметр степеневої апроксимації розподілення матеріалу в хвилястому профілі;
- коефіцієнт (при пружному
контакті нерівностей ![]() ;
при пластичному
;
при пластичному![]() );
);
- коефіцієнт (при пружному
контакті ![]() ;
при пластичному
;
при пластичному ![]() ).
).
М - параметр
механічних властивостей (при пластичному
контакті ![]() ,
при пружному
,
при пружному ![]() ).
).
k– постійна інтегрування (див. табл.).
Таблиця: Значення постійної інтегрування.
-
=2
=3
=0
=0,5
=0
=0,5
2
12
23,4
25,2
57
3
28,3
61,0
80,0
199