

Динамика поступательного движения.
Основной закон поступательного движения: производная по времени от количества движения К материальной точки или системы точек относительно неподвижной (инерциальной) системы отсчета равна главному вектору всех сил, приложенных к системе: dK/dt = F, или mwс = F, где wс – ускорение центра инерции системы. Кi = mi vi
В прямоугольных декартовых координатах уравнение движения имеет вид:
dKx/dt = Fх, dKy/dt = Fy, dKz/dt = Fz.
mi![]() = Fiх,
mi
= Fiх,
mi![]() = Fiу,
mi
= Fiу,
mi
![]() = Fiz.
= Fiz.
m dVx/dt = Fх, m dVy/dt = Fy
П ростейшие
случаи поступательного движения твердого
тела.
ростейшие
случаи поступательного движения твердого
тела.
а) Движение по инерции (F = 0) – равномерно поступательное движение (с постоянной скоростью):
mv = const, а = 0. v = const, S = vt.
б) Движение под действием постоянной силы – равномерно ускоренное движение (с постоянным ускорением):
![]() (mv) = F = const,
mv = Ft + mv0,
где mv
- количество движения тела в начальный
момент времени t =
0.
(mv) = F = const,
mv = Ft + mv0,
где mv
- количество движения тела в начальный
момент времени t =
0.
Время, за которое происходит изменение скорости из состояния покоя t=V/a
Из состояния покоя изменение скорости к моменту t: V=at Тогда S=vt/2 = at2/2
в) Неравномерно ускоренное движение
dS=Vdt
![]() S=
S=
![]()
Тело брошено вертикально вверх с начальной скоростью v0:
hmax = v02/2g.
Р абота
= Сила х Перемещение.
абота
= Сила х Перемещение.
При F = const (в случае постоянной силы в процессе перемещения) A = F s, в случае переменной силы – интеграл от силы по перемещению A = .
Если тело движется в направлении действия силы тяжести, то над телом совершается работа A = mg h.
Чтобы поднять тело (увеличить расстояние от центра Земли), над ним следует совершить работу. Работа, совершаемая силой F при движении против силы тяжести (подъеме тела) на высоту h не зависит от пути – зависит только от того, насколько тело может опуститься до заданного уровня. Эта работа запасается в виде потенциальной энергии тела (энергии положения) A =Wп = mgh, равной работе, затраченной на подъем тела.
Это не полная потенциальная энергия – только приращение энергии при подъеме тела на высоту (начало отсчета выбирается произвольно). С учетом изменения гравитационного поля по высоте Wп = m .
Потенциальной энергией называется энергия, зависящая только от взаимного расположения материальных точек (или тел). Во всех физических явлениях важна не сама потенциальная энергия, а ее изменение, которым определяется совершаемая работа. Уровень отсчета изменений заранее оговаривается.
П ри
подъеме на высоту накопилась потенциальная
энергия Wп, при
падении с этой высоты эта потенциальная
энергия превратилась в кинетическую
Wк. Wп
= Wк = mgh
= mv2/2.
ри
подъеме на высоту накопилась потенциальная
энергия Wп, при
падении с этой высоты эта потенциальная
энергия превратилась в кинетическую
Wк. Wп
= Wк = mgh
= mv2/2.
Тело брошено горизонтально с начальной скоростью v0 – комбинация двух движений взаимно перпендикулярных друг другу: горизонтального (равномерного прямолинейного) и вертикального (свободного падения).
Координаты каждой точки траектории:
- перемещение тела в горизонтальном направлении x = v0 t;
- перемещение тела в вертикальном направлении (равномерно ускоренное движение с ускорением g) y = gt2/2.
Из этих уравнений движения: t = x / v0 , y = gx2 / 2v0 – парабола.
Тело, брошено под углом к горизонту.
Как и в случае горизонтально брошенного тела, тело движется, в результате комбинации двух движений: равномерного прямолинейного движения под углом к горизонту и свободного падения в вертикальном направлении (под действием только силы тяжести – без реакции опоры).
В двумерной постановке тело, брошенное под углом к горизонту, рассматривается как материальная точка, движущаяся под действием лишь одной силы - постоянной силы его веса Р, направленной вертикально вниз. Начало координат – в точке приложения силы, обеспечившей начальную скорость полета.
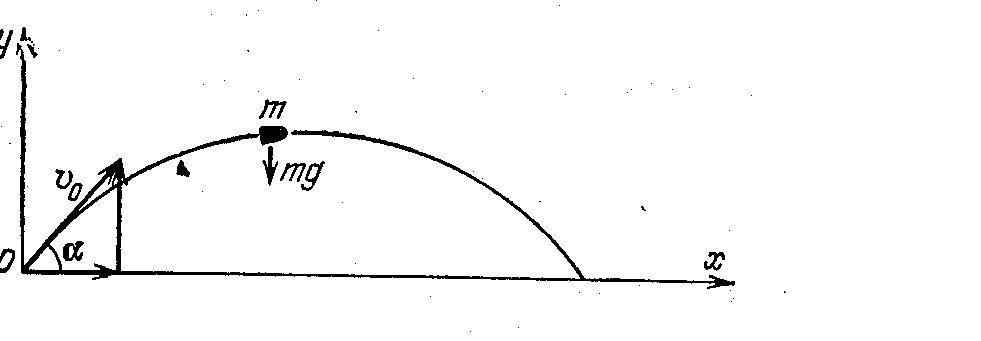
Тело массы m, брошенное под углом к горизонту, движется под действием постоянной силы веса Р = Fт, направленной вертикально вниз Р = mg.
Уравнения движения можно представить как в векторной, так и в координатной форме.
Для произвольной точки М (х,у) траектории тела:
mv = Р t + mv0, или v = gt + v0.
Проецируя векторные соотношения на оси координат, получим уравнения движения в координатной форме.
m dvx /dt = 0, vx = dx/dt,
m dvy /dt = - mg, vy = dy/dt
Необходимо найти зависимости x(t), y(t), vx(t), vy(t) из решения полученной системы дифференциальных уравнений при начальных условиях:
x(0) = x0, y (0) = y0, vx (0) = v0 cos Θ 0, vy (0) = v0 sin Θ 0.
Сопротивление воздуха
Cила сопротивления воздуха Fа/д (полная аэродинамическая сила) направлена противоположно вектору скорости тела прямо пропорциональна величине скоростного потока q и характерной площади тела S:
Fа/д = - CrqS, q = ρv2/2,
где Cr - коэффициент сопротивления, зависящий от свойств среды и тела, скорости потока, ρ [кг/м3] – плотность воздуха, зависит от высоты.
Коэффициент сопротивления определяется опытным путем, и для приближенных расчетов для тела в форме шара может быть принят независимым от скорости потока и равным 0,25 (плюс – минус 0,05 – в зависимости от скорости).
Тогда система уравнений запишется в виде:
dvx /dt = Cr qS cos Θ / m, vx = dx/dt,
dvy /dt = Cr qS sin Θ / m - g, vy = dy/dt
ρ = ρ (y), α = arctg vx / vy, q = ρv2/2
при начальных условиях:
x (0) = x0, y (0) = y0,
vx (0) = v0 cos Θ 0, vy (0) = v0 sin Θ 0.
Зависимость ρ = ρ (y) может быть задана в табличном или в аналитическом виде.
Задача не имеет аналитического решения и решается численным интегрированием. Определяется влияние шага интегрирования на точность решения задачи.
Изменение с высотой величины ускорения силы тяжести Земли
Ускорение свободного падения одинаково для всех тел и, также как и вес, зависит от географической широты и высоты над уровнем моря.
Стандартное (нормальное) значение ускорения свободного падения на уровне моря составляет g0 = 9,81 м/сек2. Для определения ускорения при удалении от поверхности Земли на высоту h используется формула g = g0[R0/(R0 + h)]2, R0 = 6370 км - радиус Земли. На географических полюсах (φ = 900) Fц = 0 и вес тела равен силе притяжения его к Земле. Вследствие того, что центростремительная сила зависит от широты, вес тела максимален на полюсах и минимален на экваторе, различие не превышает 0,55%.
Величина выталкивающей силы (закон Архимеда)
На тело действует выталкивающая сила воды в соответствии с законом Архимеда.
По закону Архимеда выталкивающая сила равна Fарх = g(y)Vρ0(y). Здесь Vρ0(y) – масса вытесненного воздуха, V – объем тела.
Величины присоединенной массы
Присоединенная масса может быть определена по формуле: m = 0,5 Vρ0.
Изменения плотности атмосферы с высотой
Гипотеза о постоянстве плотности атмосферы (ρ0 = 1,225 кг/м3) с высотой полета изменяется ρ = ρ (h), где h – высота над уровнем моря [м]: ρ = ρ0- 0, 00014h.
Кривизны Земли
Для учета кривизны Земли необходимо строить новую математическую модель - начало системы координат помещается в центр Земли. В этом случае сила притяжения направлена в начало координат (а не перпендикулярно оси координат), и тип кривой полета становится другим (эллипс, а не парабола).
Движение тела переменной массы.
Дифференциальное уравнение поступательного движения твердого тела, масса которого зависит от времени, имеет вид
(mv) = F + v1
![]() ,
где F – главный
вектор всех сил, действующих на тело,
v1 – скорость
присоединяющейся массы до присоединения
(если dm/dt > 0)
или скорость отделяющейся массы после
отделения (если dm/dt < 0).
,
где F – главный
вектор всех сил, действующих на тело,
v1 – скорость
присоединяющейся массы до присоединения
(если dm/dt > 0)
или скорость отделяющейся массы после
отделения (если dm/dt < 0).
Ускорение w тела переменной массы w = 1/m(F + Fp), где Fp = (v1 – v)dm/dt = udm/dt – реактивная сила, равная произведению производной по времени от массы тела на относительную скорость u = v1 – v присоединяющейся или отделяющейся массы.
Пример. Движение ракеты в условиях отсутствия внешнего силового воздействия.
Реактивная сила, создаваемая двигателем, - сила тяги ракеты: Fp = u dm/dt, где dm/dt - скорость уменьшения массы ракеты за счет выгорания топлива.
Уравнение движения ракеты: m dv/dt = u dm/dt,
где v и m - скорость и масса ракеты в произвольный момент времени t, u - относительная скорость отделяющейся массы.
Векторы dv/dt и u направлены в противоположные стороны, потому m dv/dt = - u dm/dt, откуда при u = const следует уравнение Циолковского: v = v0 + ulnm0/m, где v0 и m0 - начальные значения скорости и массы ракеты (при t =0).