

Модель сопряжения элементов
Математическая модель сложной системы помимо формального описания элементов обязательно включает формальные описания взаимодействия элементов – модель сопряжения.
В модели сопряжения элементов отражается не процесс функционирования элементов, а только такие их свойства, которые существенны для сопряжения элементов системы друг с другом и с внешней средой.
Основные предположения, концентрирующие интуитивные представления о закономерностях сопряжения элементов системы.
1. Взаимодействие между системой и внешней средой, а также между агрегатами внутри системы осуществляется посредством передачи сигналов, взаимное влияние вне механизма обмена сигналами не учитывается. Внешняя среда рассматривается как некоторый фиктивный агрегат, характеризуемый совокупностью входных и выходных сигналов.
2. Сигнал описывается конечным набором характеристик как совокупность элементарных сигналов, одновременно возникающих на входе элемента (аналогично и выходной сигнал). Любой сигнал можно характеризовать конечным числом параметров (для детали – размеры, материал, температура, для информационного сигнала – совокупность букв, цифр). Элементарные сигналы передаются независимо друг от друга по элементарным каналам. Каждому контакту соответствует один элементарный канал.
3. К каждому из входных контактов элемента подключается не более, чем один элементарный канал (исключается неопределенность в поведении элемента, если к нему будут приходить несколько элементарных каналов от различных выходных контактов).
Каждый элемент Сj, в том числе С0, как элемент системы S достаточно характеризовать множеством входных контактов X1(j), X2(j), . . . , Xi(j), . . ., Xm(j), которое обозначим [Xi(j)]1m, и множеством выходных контактов Y1(j), Y2(j), . . . , Yk(j), . . ., Yr(j), обозначаемым [Yl(j)]1r. Здесь для простоты приняты обозначения m = mj, r = rj.
Таким образом, математической моделью элемента Сj, используемой для формального описания сопряжения его с прочими элементами и внешней средой, является пара множеств [Xi(j)]1m, [Yl(j)]1r.
Множество всех входных контактов всех
элементов системы и внешней среды -
![]() .
Множество выходных контактов -
.
Множество выходных контактов -
![]() .
.
Каждому входному контакту Xi(j) соответствует не более чем один выходной контакт Yl(k), с которым он связан элементарным каналом. Поэтому можно ввести однозначный оператор
Yl(k) = R (Xi(j)) с областью определений в множестве и областью значений в множестве , сопоставляющий входному контакту Xi(j) выходной контакт Yl(k), связанный с ним элементарным каналом.
Совокупность множеств и и оператора R называется схемой сопряжения, оператор R – оператором сопряжения.
Оператор сопряжения можно задать в виде таблицы, в которой на пересечении строк с номерами элементов системы j и столбцов с номерами контактов i, располагаются пары чисел (k, l), указывающие номер элемента к и номер элемента l, с которыми соединен контакт Xi(j).
На рисунках изображены пример агрегативной системы и оператора сопряжения в виде таблицы, возможная схема сопряжения подсистем агрегативной системы.
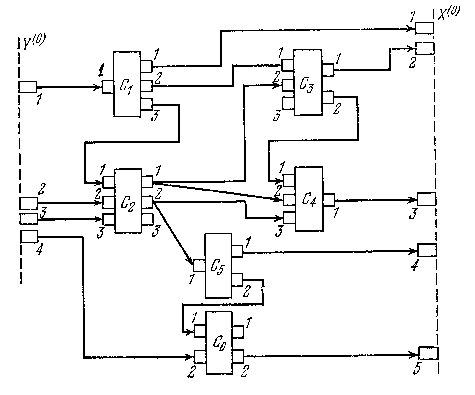
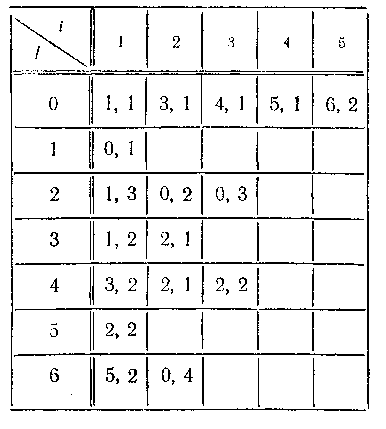
Возможная схема сопряжения элементов агрегативной системы и оператор сопряжения
Сложная система S может быть расчленена на некоторое число подсистем Sμ, μ = 1, 2, . . . , M, содержащих не менее чем по одному элементу таким образом, что данный элемент Cj входит только в одну из подсистем Sμ. Подсистема Sμ сама является сложной системой и в то же время – элементом системы S. Подсистема Sμ как самостоятельная система должна иметь контакты Xi(0)μ и Yl(0)μ фиктивного элемента С0μ, представляющего внешнюю среду для нее, а как элемент системы S она должна содержать входные Xi(μ) и выходные Yl(μ) контакты для связи с другими подсистемами. Соответствующие Xi(μ) и Yj(0)μ, а также Xi(0)μ и Yl(μ) объединяются в двойные контакты на границах подсистемы Sμ.
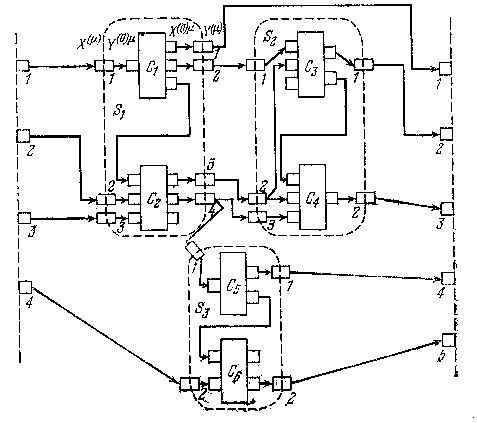
Возможная схема сопряжения подсистем агрегативной системы
Методика сопряжения связей между элементами сложной системы при помощи операторов сопряжения распространяется и на те случаи, когда в процессе функционирования системы структура связей изменяется во времени или подчиняется внешним командам управления. В этом случае в оператор сопряжения входит время t и параметр a (сигнал) управления.