

5.3 Классификация математических моделей в зависимости от параметров модели Непрерывные и дискретные модели
Процесс функционирования системы может протекать непрерывно или дискретно, и фазовое пространство, в котором функционирует система, может быть дискретным или непрерывным. Решение о дискретности или непрерывности модели принимается на этапе постановки задачи также на рациональном уровне.
Непрерывной во времени модель является в том случае, когда характеризующая ее переменная определена для любого значения времени; дискретной во времени - если переменная получена только в определенные моменты времени.
Дискретность модели может также возникнуть в том случае, если она состоит из непрерывных компонентов, но информация переходит от одной компоненты к другой по заданной схеме (такие переходы возможны только по окончании соответствующих операций).
Непрерывные модели применяются при изучении систем, связанных с непрерывными процессами, которые описываются с помощью систем дифференциальных уравнений, задающих скорость изменения переменных системы во времени. Непрерывные модели можно описать с помощью конечно-разностных уравнений, которые в пределе переходят в соответствующие дифференциальные уравнения.
Непрерывная система функционирует в непрерывном времени (интервал ее функционирования T = [t0, tk] представляет собой отрезок оси действительных чисел, заданный началом t0 и концом tk), непрерывно изменяется состояние системы (непрерывны операторы α и β). Малые изменения входных воздействий приводят к такого же порядка малым изменениям состояния системы и выходных воздействий.
Модель непрерывная, если она описывает поведение системы для всех моментов времени из некоторого промежутка.
Модель S = gt2/2, 0 < t < 100 непрерывна на промежутке времени (0; 100).
Непрерывные системы могут быть описаны с помощью дифференциальных или алгебраических уравнений.
Дискретная система функционирует в дискретном временном пространстве и определяется дискретными состояниями. Изменения ее состояния происходят лишь в дискретные моменты времени (дискретный интервал функционирования.
Дискретными могут быть системы, для которых дискретным является или только время, или только состояния. Это широкий и практически важный класс систем – в него входят все дискретные (цифровые, измерительные, управляющие и вычислительные, в том числе ЭВМ) устройства.
Дискретность временного пространства означает, что явления, сопровождающие изменения состояния системы, могут происходить лишь в моменты времени, образующие некоторое дискретное множество, в котором моменты времени можно пронумеровать. В частности, переходы системы из одного состояния в другое могут осуществляться в целочисленные моменты времени. Общий случай сводится к этому частному введением целочисленной нумерации моментов возможных изменений состояний.
Если рассматривать только t - 0, 1, 2, ..., 10 (с), то модель S1 = gt2/2, или числовая последовательность S0 = 0, S = g/2, S2 = 2g, S3 = 9g/2, ..., S10= 50g, может служить дискретной моделью движения свободно падающего тела.
Непрерывная система может рассматриваться как дискретная. Это достигается путем учета ее состояния лишь в отдельные моменты времени и округления их значений до целых единиц.
Системы с дискретными состояниями характеризуются тем, что в любой момент времени можно однозначно определить, в каком именно состоянии находится система. Для такой идентификации обязательно нужно знать тот признак, который отличает одно состояние системы от другого. Например, при исследовании систем массового обслуживания в качестве такого признака обычно используют число заявок в системе. Соответственно, изменение числа заявок в системе интерпретируется как переход системы в новое состояние.
Если же не удается подобрать такой признак, либо его текущее значение невозможно зафиксировать, то систему относят к классу систем с непрерывным множеством состояний.
Смена состояний может происходить либо в фиксированные моменты времени, множество которых дискретно (например, поступление новых заявок на обслуживание), либо непрерывно (изменение температуры тела при нагревании). В соответствии с этим различают системы с дискретным временем переходов (смены состояний) и системы с непрерывным временем переходов (точнее, «живущие» в непрерывном времени).
По условиям перехода из одного состояния в другое различают детерминированные системы и стохастические.
Дискретизация (преобразование непрерывной функции в дискретную) применяется в системах передачи, хранения и обработки информации, поступающей в виде непрерывных сигналов.
Например, передача фото или телевизионных изображений (функция двух или трех переменных) осуществляется путем разбивки на дискретные строки. Передача звука (функция одной переменой) с помощью импульсно-кодовой модуляции сопряжена с дискретизацией непрерывного сигнала и последующим кодированием (модуляция – изменение параметров некоторого физического процесса во времени в соответствии с текущим значением сигнала).
Дискретными могут быть системы с дискретным вмешательством случая – эти системы почти всегда ведут себя как непрерывные и только в дискретные моменты времени испытывают случайные воздействия.
В модели функционирования дискретной системы предполагается дискретность интервала функционирования T = [t0, tk].
Дискретизация по времени обычно выполняется так, чтобы интервал = t+1 - t между ближайшими в множестве Т моментами времени t+1 и t был один и тот же для всех . Тогда называется временем такта, а моменты t - тактами функционирования системы.
Фрагменты входного и выходного процессов дискретной системы представляются в виде пронумерованных последовательностей входных и выходных воздействий:
Хt0t = {x(), x( + 1), . . ., x()} = Х;
Уt0t = {у(), у( + 1), . . ., у()} = У,
однозначно задаваемых номерами первого и последнего тактов функционирования системы. Тогда модель функционирования дискретной системы:
z () = α (, z (), Х);
у () = β (, z (), Х).
Если фрагмент входного процесса Х разбить на два подфрагмента и представить его как их объединение, то уравнения состояния и выхода в дискретной системе имеют вид:
z (+1) = α (, z (), x (), x (+1));
у (+1) = β (, z (), x (), x (+1)),
где α и β - функции действительных переменных , z (), x () и x (+1).
Величина x (+1) не влияет на z (+1), если состояние системы изменяется с некоторой задержкой относительно момента поступления входного воздействия. При этом
z (+1) = α (, z (), x ()).
Выходное воздействие у (+1) определяется значениями z и x в том же (+1)–м такте, и потому
у () = β (, z (), x ()).
Изучением свойств непрерывного характера занимается классическая математика. В дискретной математике отказываются от основополагающих понятий классической математики – предела и непрерывности.
Использование классической или дискретной математики зависит от задач исследований – какая модель явления рассматривается – дискретная или непрерывная. Основные разделы дискретной математики: математическая логика, вычислительная математика (численное интегрирование), теория графов (задачи анализа структур, экономические задачи, электротехнические задачи – трассировка), теория кодирования (хранение, обработка, передача информации), теория функциональных систем (описание функционирования сложных систем по функционированию их компонент, правила построения сложных управляющих систем).
Дискретное представление пространства и времени обуславливает дискретность фазовых переменных, которыми являются величины, характеризующие состояния элементов. Роль элементов и внутренних параметров выполняют системы и выходные параметры некоторых подсистем. Так, элементами ЭВМ можно считать арифметическое устройство, оперативную память, устройство ввода и вывода и т.п. Фазовые переменные, характеризующие состояния этих элементов, могут принимать только два значения: «занято», если в данный момент устройство работает, или «свободно», если устройство находится в состоянии ожидания.
Примерами выходных параметров служат вероятность обслуживания поступивших в систему заявок (сообщений), среднее время простоя в очереди на обслуживание, быстродействие устройства.
Для построения математических информационных моделей широко используют математическую логику, теорию массового обслуживания, методы теории автоматического управления.
Пример. Реле как дискретная система.
Реле – это элемент, входная и выходная величины которого могут принимать лишь конечное число значений (как правило, два или три).
Электромагнитное реле - типичный релейный элемент, исполнительные органы (контакты) которого могут находиться только в двух устойчивых состояниях – в замкнутом и разомкнутом.
Реле состоит из сердечника с обмоткой, якоря, контактов и входного выключателя; кроме того, имеются входные клеммы х и выходные клеммы у. Если входной выключатель разомкнут – обмотка обесточена, контакты разомкнуты; если замкнут – в обмотке появляется ток. Когда ток достигает определенной величины, сердечник притягивает якорь, контакты замыкаются, на выходных клеммах появляется напряжение.
Э
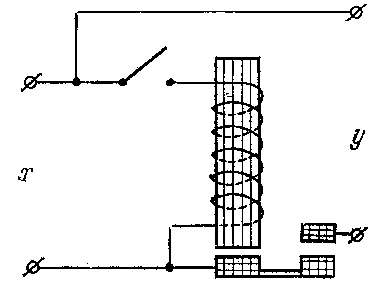
Обычная формализация процессов такого рода сводится к интерпретации наличия напряжения на входе (сигнал х = 1) или на выходе (сигнал у = 1) как истинных высказываний, а отсутствие напряжения на входе (сигнал х = 0) или на выходе (сигнал у = 0) – как ложных высказываний, а также зависимости у = f(x) как некоторой функции исчисления высказываний. Таким образом, реле здесь выступает в качестве логического элемента.
Устройства релейного действия применяются для изменения состояния во многих областях техники – в пневматических, гидравлических, электрических цепях и т.д. Реле выполняют функции защиты, контроля, управления, сигнализации. Реле времени создает необходимую задержку в передаче воздействий между отдельными узлами автоматики.
В соответствии с физической природой внешних явлений, вызывающих действие реле, их делят на электрические (ток, напряжение, мощность, сопротивление, частота), механические (перемещение, скорость, давление, уровень), тепловые, акустические, химические, магнитные и т.д.
Релейные элементы характеризуются порогом срабатывания и порогом отпускания. Порог срабатывания - минимальное абсолютное значение возрастающего воздействия, при котором элемент изменяет свое состояние и одновременно изменяет воздействие на выходе в соответствии с релейной характеристикой (преобразование непрерывной входной величины в дискретное значение выходной величины). Порог отпускания – минимальное абсолютное значение уменьшающегося выходного воздействия, при котором релейный элемент возвращается в первоначальное состояние. Релейный элемент с фиксацией – элемент остается в занятом состоянии и после снятия воздействия на входе, возвращение в первоначальное состояние – после подачи воздействия на другой вход элемента (или другого знака на тот же вход). Другие характеристики релейного элемента – быстродействие, время срабатывания, время отпускания.