

6.7.2 Последовательно-параллельное соединение групп двигателей
Соответствует положению главной рукоятки КВ- « Ход-2». Начинает вращаться реостатный контроллер РК с 1-ой по 18-ую позиции, а после переключения групп двигателей на параллельное соединение реостатный контроллер вращается в обратном направлении с 18-ой (19) по 5-ую (32) позиции (см. рис.124).
В дальнейшем все изменения в схеме происходят при вращении РК.
При переходе РК на 2-ую позицию отключаются контакторы КШ1, КШ2 и магнитное поле двигателей усиливается до 100%. Сила тяги на каждом двигателе возрастает в 4 раза, а ускорение увеличивается с 0,3 м/с2 до 1,2 м/с2 с темпом изменения 0,6 м/с3. Начиная с 3-й по 14-ю позиции, происходит вывод пусковых резисторов из цепи двигателей. При вращении РК его кулачковые элементы замыкаются и размыкаются согласно таблице, изображенной на рис.123, в прямой последовательности.
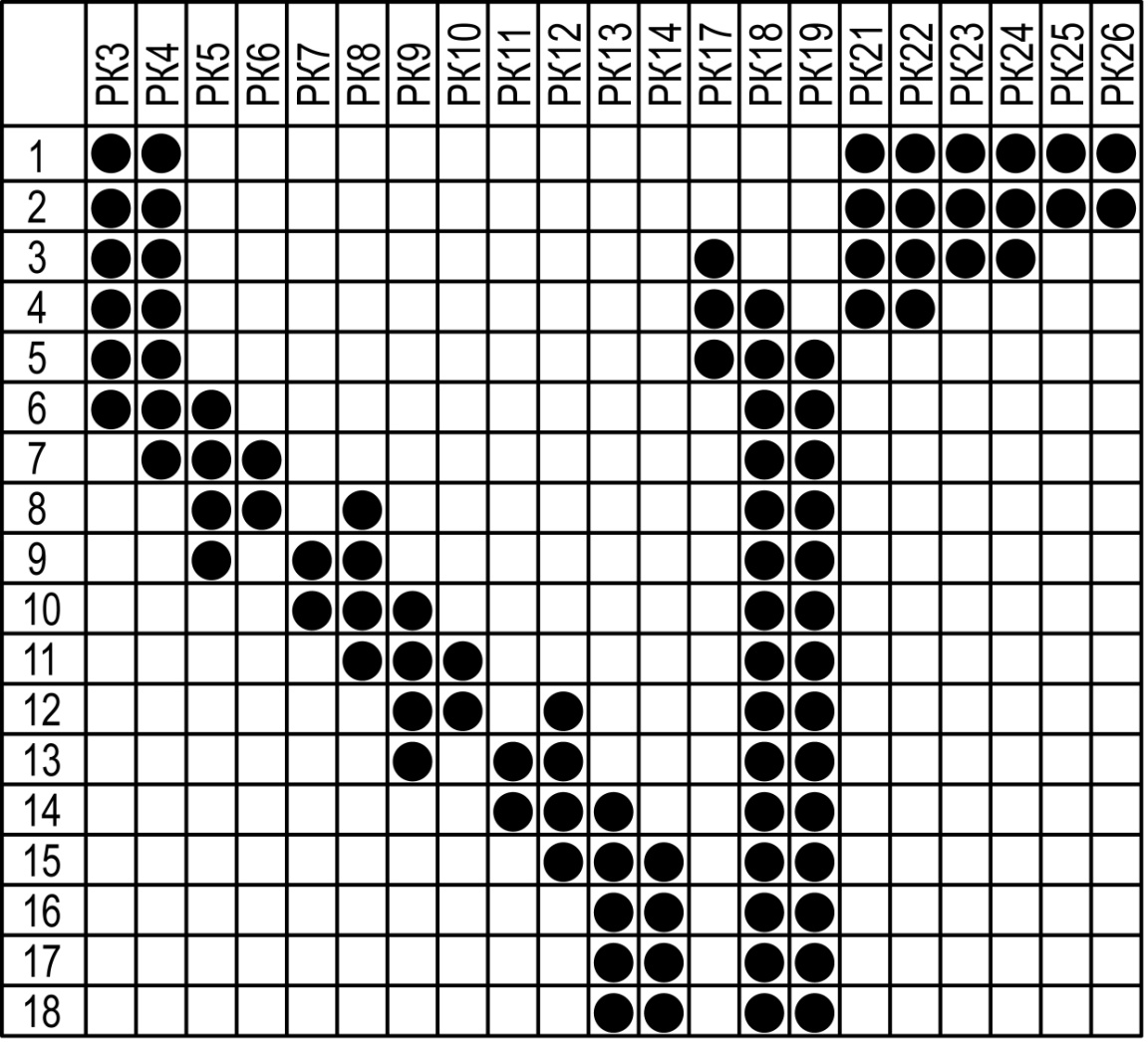
Рис.123 Таблица замыкания кулачковых элементов РК по позициям
Кулачковые шайбы вала РК включают силовые контакторы, которые закорачивают отдельные секции пускового резистора. Вследствие уменьшения сопротивления цепи происходит увеличение тока от Imin до Imax , а затем плавное его уменьшение за счет возрастания противо-ЭДС.
Пусковой ток определится по формуле:
;
из, которой видно, что при уменьшении сопротивления пускового резистора R ток возрастает, а с увеличением противо-ЭДС E –ток уменьшается.
С 15-ой по 18-ую позиции все сопротивления выведены, и тяговые двигатели начинают работать на безреостатной характеристике при 100 % поле. На 17-й (18-ой) позиции РК останавливается.
Цепь тока на 17-ой-18-ой позиции РК (рис.125)
ТР, КС1, П, ГВ, ВА, ЛК1, РП1-3, ДР1, ДР2, ЛК3, Я1, Я3, ВП, обмотки возбуждения 1-го и 3-го двигателей, ВП, РУТ, диод, ПМ3, РК13, РК19, ЛК2, РК14, РП2-4, Я2, шунт амперметра, Я4, ДР2, ДР1, ЛК4, ПМ1, РУТ, ВП, обмотки возбуждения 4-го и 2-го двигателей, ВП, диод, ПМ2, КС2, ЗУМ, «земля».
В положении главной рукоятки КВ «Ход-2» при порожнем вагоне РК вращается хронометрически без задержки на позициях, так как ток в силовой цепи не достигает величины большей уставки РУТ. Только в случае пуска при максимальной нагрузке на предельном подъеме вращение РК будет контролировать РУТ. Уставка РУТ возрастет с 310-340 А до 425 А.
Скорость выхода груженого вагона на автоматическую характеристику полного поля ТЭД (16-18-я позиции РК) составляет 8,5 км/ч.
На 16-ой позиции РК получает питание катушка ПП переключателя ППС и аппарат переключает группы двигателей с последовательного соединения на параллельное по «мостовой» схеме. В момент перехода сначала замыкаются силовые контакторы ПП2 и ПП3, а затем размыкается контактор ЛК2 ( при переходе переключателя ППС из положения ПС в ПП, РК дойдет до 17-ой (18) позиции и остановится).
В результате образуются две параллельные группы двигателей и в каждую группу двигателей для ограничения тока после перехода аппарата ППС из ПС в ПП, вводится резистор. В первую группу двигателей резистор Р9-Р3 величиной 0,909 Ом, а во вторую группу двигателей резистор Р17-Р23 величиной 0,909 Ом.
Таким образом, 17-я(18) позиция РК без его вращения стала 20-ой(19). Цепь тока на 20-ой (19) позиции РК (см. рис. 126):
ТР, КС1, П, ГВ, ВА, две параллельные цепи:
1) ЛК1, РП1-3, ДР1, ДР2, ЛК3, Я1, Я3, ВП, обмотки возбуждения 1-го и 3-го двигателей, ВП, РУТ, диод, ПМ3, РК13, резистор Р9-Р3, ПП2, КС2, ЗУМ, «земля».
2) ЛК5, ПП3, резистор Р17-Р23, РК14, РП2-4, Я2, шунт амперметра, Я4, ДР2, ДР1, ЛК4, ПМ1, РУТ, ВП, обмотки возбуждения 4-го и 2-го двигателей, диод, ПМ2, КС2, ЗУМ, «земля».
После переключения переключателя ППС в положение ПП реостатный контроллер начинает вращаться в обратном направлении с 17 (20) позиции по 5 (32) позицию, что приводит к замыканию его кулачковых элементов в обратной последовательности. На 17 (20) и 16 (21) позициях вывод резисторов не происходит и сопротивление в цепи групп двигателей не изменяется. Эти позиции выполнены для смягчения броска тока при переходе из ПС в ПП. Начиная с 15 (22) позиции по 7 (30) позиции происходит вывод пусковых резисторов из цепи двигателей под контролем РУТ. Выведение секций резисторов из цепей групп двигателей происходит поочередно, что способствует смягчению толчков тягового усилия при переходе с позиции на позицию.
На 5 (32) позиции РК останавливается. Все резисторы выведены. Эта позиция является автоматической характеристикой при последовательно – параллельном соединении групп двигателей и 100% поле. Этой позицией целесообразно пользоваться при движении на затяжных подъемах (см. рис.127).
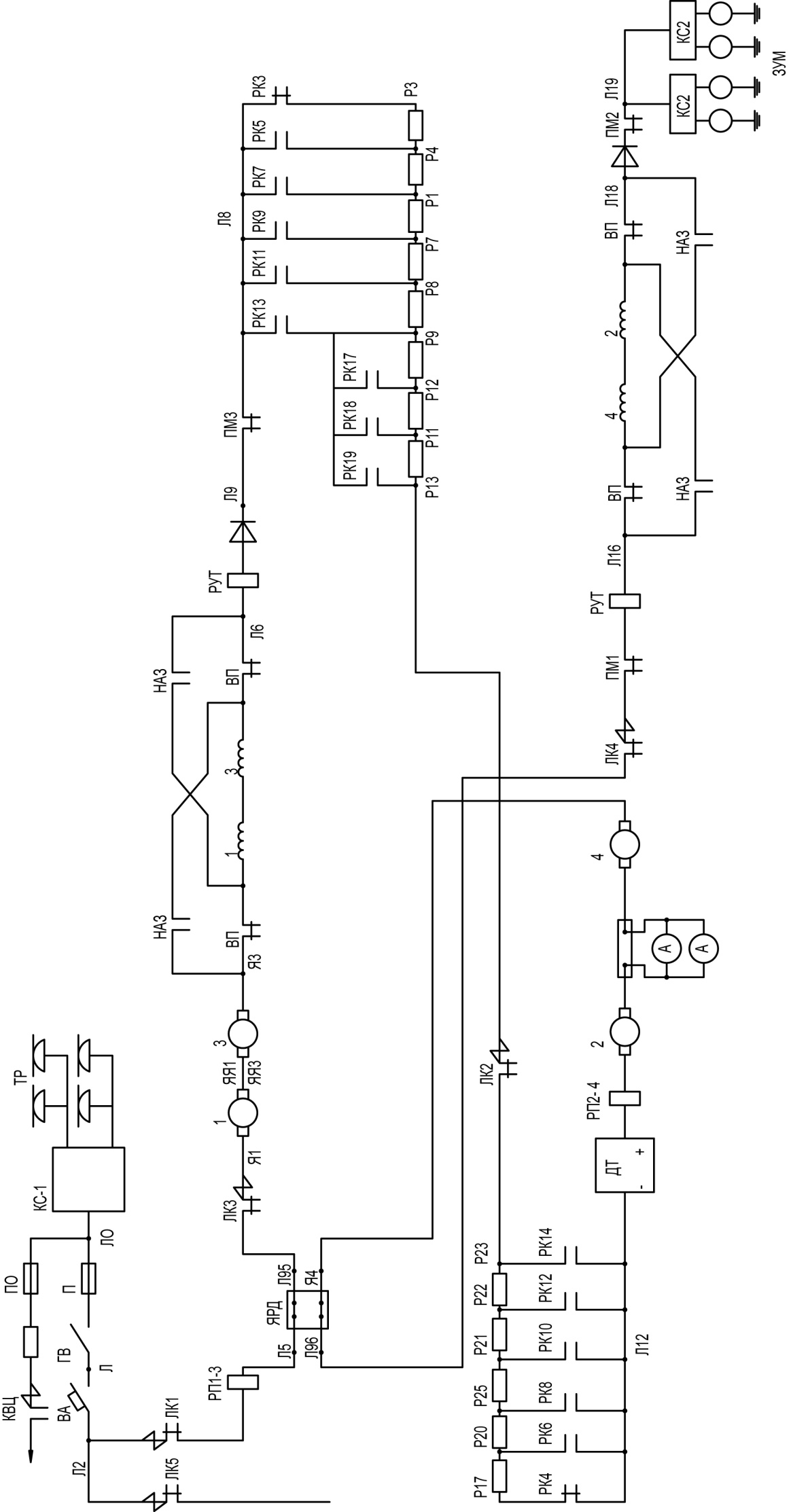
Рис.124 Силовая схема электрических цепей при последовательном соединении групп двигателей. Режим Ход-2, 2-я позиция РК |
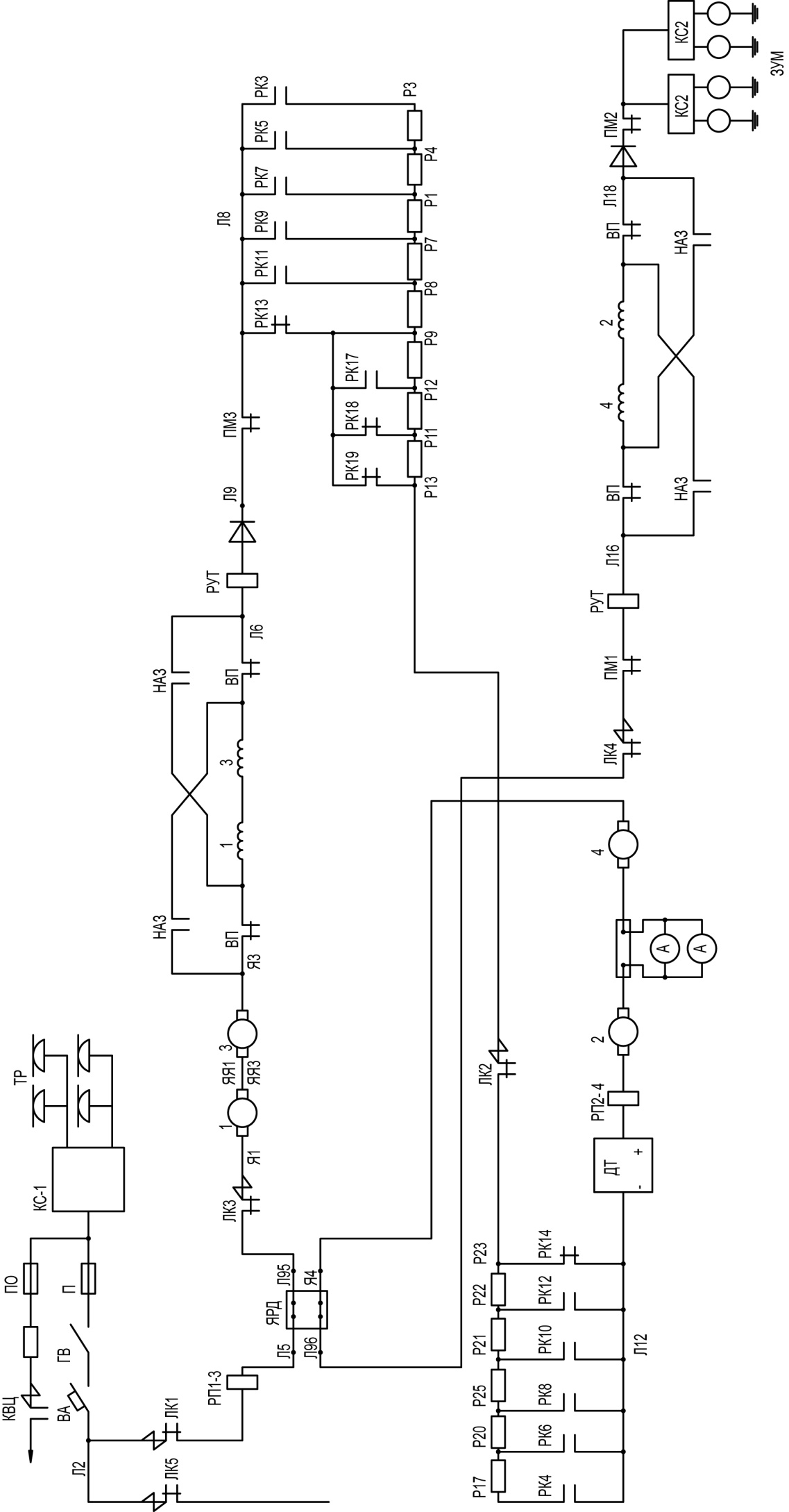
Рис.125 Силовая схема электрических цепей при последовательном соединении групп двигателей. Режим Ход-2, 17-18-я позиции РК |
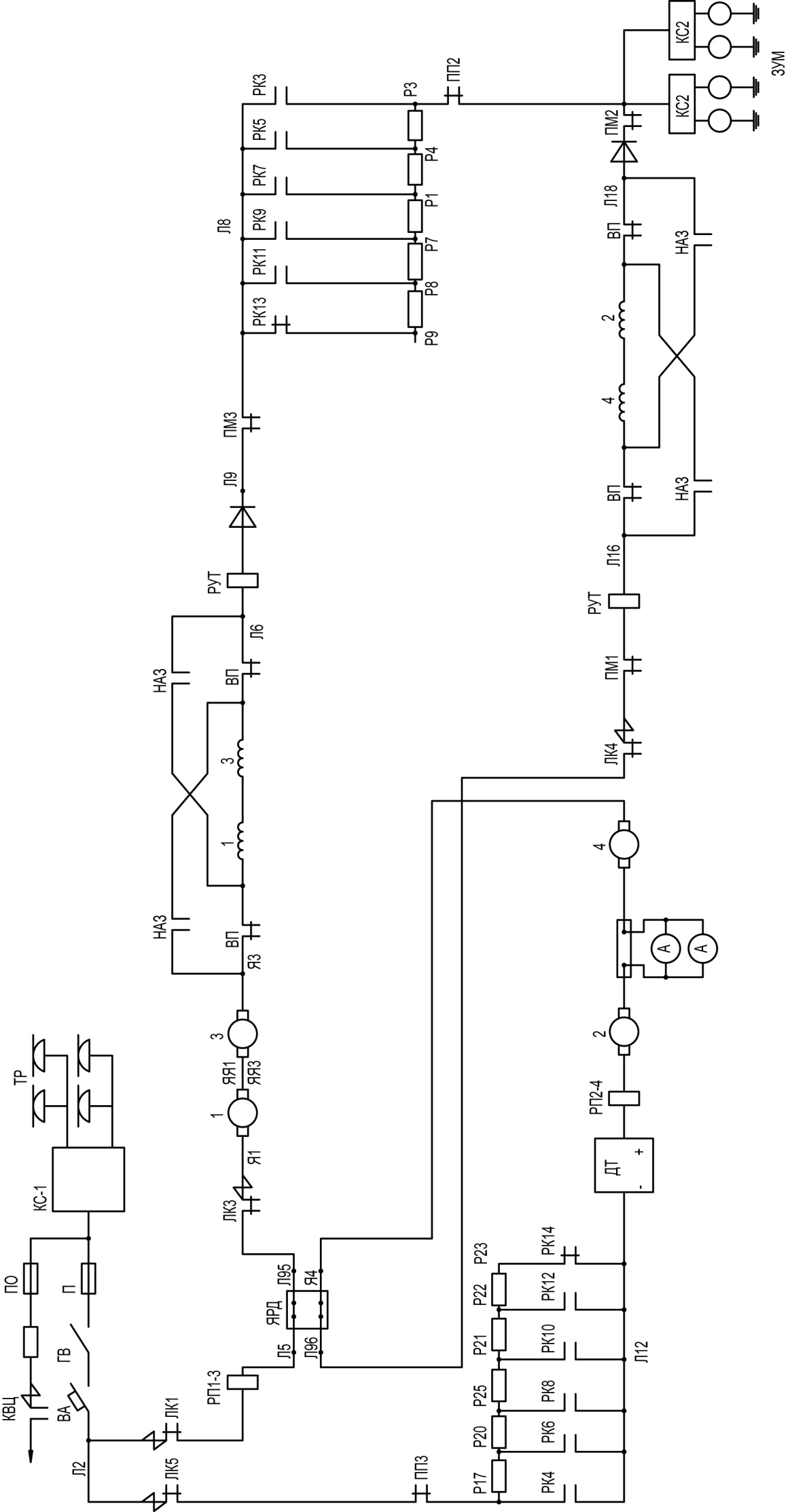
Рис.126 Силовая схема электрических цепей при параллельном соединении групп двигателей. Режим Ход-2, 17-18-я позиции РК |
Цепь тока на 5 (32) позиции :
ТР, КС1, П, ГВ, ВА, две параллельные цепи:
ЛК1, РП1-3, ДР1, ДР2, ЛК3, Я1,Я3,ВП, обмотки возбуждения 1-го и 3-го двигателей, ВП, РУТ, диод, ПМ3, РК3, ПП2, КС2, ЗУМ, «земля».
ЛК5, ПП3, РК4, ПР2-4, Я2, шунт амперметра, Я4, ДР2, ДР1, ЛК4,ПМ1, РУТ, ВП, обмотки возбуждения ;4-го и 2-го двигателей, ВП, диод, ПМ2, КС2, ЗУМ, «земля».