

Математика для инженеров(теория)I том
.pdf10. Преобразование прямоугольных координат. Рассмотрим три вида преобразований прямоугольных координат на плоскости:
1)параллельный перенос осей координат, когда изменяется положение начала координат, а направления осей остаются прежними;
2)поворот осей координат, когда обе оси поворачиваются на один и тот же угол, а начало координат не изменяется;
3)зеркальное отображение, когда направление одной из коор- динатных осей меняется на противоположное, а направление второй не меняется.
10.1. Параллельный перенос осей координат.
Рис. 1 |
Рис. 2 |
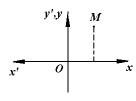
Пусть на плоскости заданы старая система координат Оху и новая |
|
O′x′y′ (рис. 1), где точка O′(x0; y0 ) |
получена при параллельном пере- |
носе старой системы координат в эту точку.
Тогда для любой точки М плоскости, имеющей координаты (х; у)
в системе координат Оху, имеем: OM = OO′ + O′M или в координатной
форме
x = x0 + x′, y = y0 + y′ . |
(1) |
Формулы (1) устанавливают связь между старыми и новыми ко-
ординатами и определяют параллельный перенос координатных осей.
10.2. Поворот осей координат. Пусть на плоскости задана старая система координат Оху и новая O′x′y′ , полученная в результате
поворота старой системы около точки О на угол α (рис. 2). Тогда для любой точки М плоскости имеем:
OQ = OP − QP = OP − NK ; MQ = MN + NQ = KP + MN.
Отсюда
x = x′cosα − y′sinα ,
(2)
y = x′sinα + y′cosα .
Таким образом, формулы (2) устанавливают связь между ста-
рыми и новыми координатами и определяют поворот координатных осей на угол α .
143
10.3. Зеркальное отображение. Считаем,
что задана старая система координат Oxy и но- вая Ox′y′ , полученная в результате зеркально- го отображения относительно оси Oy (рис. 3).
Тогда для любой точки М плоскости имеем:
Рис. 3 x = -x′, y = y′.
Формулы (3) устанавливают связь между старыми и новыми координатами и определяют зеркальное отображе- ние относительно оси Оу. Аналогичные формулы ( x = x′, y = -y′ )
получаем и при зеркальном отображении относительно оси Ох.
20. Общее уравнение линии второго порядка. Общее уравнение л и н и и в т о р о г о п о р я д к а и м е е т с л е д у ю щ и й в и д :
Ax2 + 2Bxy + Cy2 + 2Dx + 2Ey + F = 0 , |
(4) |
где A, B, C, D, E, F – любые заданные числа, но A, B и C одновре- менно не равны нулю (A2 + B2 + C2 ¹ 0) .
Утверждение 1. Пусть AC - B2 ¹ 0 . Тогда уравнение (4) с по-
мощью параллельного переноса и поворота осей координат приводится к виду
¢ |
¢¢2 |
¢ ¢¢2 |
+ F |
¢ |
= 0, |
(5) |
A x |
|
+ C y |
|
|||
где A′, C′, F′ – некоторые числа, а (x′′; y′′) |
– координаты точки в новой |
|||||
системе координат.
Доказательство. Осуществим параллельный перенос осей ко- ординат Ох и Оу в точку O′(x0; y0 ) . Тогда старые координаты (x; y)
будут связаны с новыми (x′; y′) формулами (1), а уравнение (4) в новых
координатах примет вид
Ax |
¢2 |
¢ ¢ |
+ Cy |
¢2 |
|
¢ ¢ |
¢ ¢ |
+ F |
¢ |
= 0 |
, |
(6) |
||
|
+ 2Bx y |
|
+ 2D x |
+ 2E y |
|
|||||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D′ = Ax0 + By0 + D, |
E′ = Bx0 + Cy0 + E, |
|
|
|||||||||||
F¢ = Ax02 + 2Bx0 y0 + Cy02 + 2Dx0 + 2Ey0 + F. |
||||||||||||||
Выберем координаты (x0; y0 ) |
так, чтобы |
D′ |
и |
E′ |
обратились |
|||||||||
в нуль: |
|
ìAx |
+ By |
+ D = 0, |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||||||
|
|
íBx0 |
+ Cy0 |
+ E = 0. |
|
|
|
|
|
(7) |
||||
|
|
î |
0 |
|
|
0 |
|
|
|
|
|
|
|
|
Это можно сделать единственным образом, т.к. AC - B2 ¹ 0 .
При таком выборе пары чисел x0 , y0 уравнение (6) примет вид
Ax |
¢2 |
¢ |
¢ |
+ Cy |
¢2 |
+ F |
¢ |
= 0 |
, |
(8) |
|
+ 2Bx y |
|
|
|
144
Повернем теперь систему координат O′x′y′ на угол α и получим новую систему координат O′x′′y′′ , где старые координаты x′, y′ связаны
с новыми |
x′′, y′′ |
формулами (2): |
x′ = x′′cosα − y′′sinα , |
|
y′ = x′′sinα + y′′cosα . |
|
|
|
|
В системе координат O′x′′y′′ уравнение (8) запишется в виде |
|
|||
|
A′x′′2 + 2B′x′′y′′ + C′y′′2 + F′ = 0 , |
(9) |
||
где |
|
|
|
|
A′ = Acos2 α + 2B cosα sinα + C sin2 α, |
|
|
||
B′ = −Asinα cosα + B cos2α + C sinα cosα, |
|
|
||
C′ = Asin2 α − 2B cosα sinα + C cos2 α.
Выберем угол α так, чтобы коэффициент B′ в уравнении (9) обратился в нуль, что приведет к тригонометрическому уравнению
относительно α : |
2B cos2α = (A − C)sin 2α . Если A = C , то cos2α = 0 |
||||||
и полагаем α = |
π |
. Если A ¹ C , то выбираем α = |
1 |
arctg |
2B |
. При |
|
4 |
2 |
A − C |
|||||
|
|
|
|
||||
таком выборе α уравнение (9) примет вид (5). □ Отметим еще, что уравнения (7) называются уравнениями центра
линии второго порядка, а точка (x0; y0 ) называется центром этой
линии. Из §1.8 вытекает, что отличие от нуля числа AC − B2 (опреде- лителя системы (7)) является необходимым и достаточным условием существования единственного решения системы (7).
30. Инвариантность выражения АС – В2. Классификация линий второго порядка.
Утверждение 2. При параллельном переносе и повороте осей координат выражение АС – В2 остается неизменным.
Доказательство. Коэффициенты А,В,С при старших членах уравнения (4) при параллельном переносе осей координат не меняются.
Значит, не меняется и выражение AC − B2 . При повороте осей коор- динат коэффициенты А,В,С заменяются на A′, B′,C′ . Имеем
A¢C¢ - B¢2 =
=(Acos2 α + 2Bcosα sinα + C sin2 α )×(Asin2 α - 2Bcosα sinα + C cos2 α )-
-éë(C - A)cosα sinα + B(cos2 α - sin2 α )ùû2 =
= AC (cos2 α + sin2 α )2 - B2 (cos2 α + sin2 α )2 = AC - B2 ,
что и требовалось показать. □
145

Величину AC − B2 называют инвариантом общего уравнения линии второго порядка, и в зависимости от ее знака, линии второго порядка подразделяются на следующие три типа:
1)эллиптический, если AC − B2 > 0;
2)гиперболический, если AC − B2 < 0 ;
3)параболический, если AC − B2 = 0 . Рассмотрим линии различных типов.
1) Эллиптический тип. Т.к. AC − B2 > 0 , то на основании утверждения 1 общее уравнение (4) приводится к виду (для удобства записи штрихи у коэффициентов и координат опускаем):
Ax2 + Cy2 + F = 0 . |
(10) |
а) A > 0, C > 0 (случай A < 0, C < 0 сводится к случаю A > 0, C > 0 умножением уравнения (10) на –1) и F<0. Перепишем уравнение (10)
в эквивалентной форме
x2 + y2 =1, a2 b2
где a2 = − FA , b2 = − CF . Это каноническое уравнение эллипса.
б) A>0, C>0 и F>0. Аналогично предыдущему будем иметь
x2 + y2 = −1. a2 b2
Этому уравнению не удовлетворяют координаты ни одной точки плоскости. Его называют уравнением мнимого эллипса.
в) A > 0, C > 0, F = 0. Уравнение примет вид: a2 x2 + c2 y2 = 0 , где
a2 = A, c2 = C . Ему удовлетворяет только точка О(0;0). Такое уравне- ние называют уравнением пары мнимых пересекающихся прямых.
2) Гиперболический тип. В этом случае AC − B2 < 0 и общее уравнение (4), согласно утверждению 1, также приводится к виду (10).
Возможны следующие случаи:
а) A>0, C<0 (случай A<0, C>0 рассматривать не надо, т.к. умно- жением (10) на –1 он сводится к случаю A>0, C<0) и F ¹ 0 (для опре- деленности считаем, что F<0). Перепишем тогда уравнение (10) в виде
x2 − y2 =1, a2 b2
где a2 = − FA , b2 = CF и получим каноническое уравнение гиперболы.
146

б) A > 0, C < 0 и |
F = 0. Уравнение |
(10), если обозначить |
a2 = A, c2 = -C , примет вид: a2 x2 - c2 y2 = 0 |
или (ax - cy)(ax + cy) = 0 . |
|
Отсюда ax - cy = 0 |
или ax + cy = 0 и, таким образом, получаем |
|
пару пересекающихся в начале координат прямых.
3) Параболический тип. Если AC - B2 = 0 , то поворотом осей координат на угол α, как и при доказательстве утверждения 1, общее уравнение (4) приводится в виду
Ax2 + Cy2 + 2Ey + 2Dx + F = 0 , |
(11) |
причем здесь AC = 0 , т.е. один из коэффициентов А или С равен нулю. Пусть A ¹ 0, C = 0 . Представим (11) так:
или
где F* = F - D2
A
Перенесем
æ |
|
2D |
|
|
æ |
D ö2 |
|||
Aç x2 |
+ |
|
|
|
x + |
ç |
|
÷ |
|
A |
|
|
|||||||
ç |
|
|
|
|
è |
A ø |
|||
è |
|
|
|
|
|
|
|
|
|
|
æ |
|
|
D ö2 |
|
|
|
||
A |
ç x + |
|
|
|
÷ |
+ 2Ey |
|||
|
|
|
|||||||
|
è |
|
|
A ø |
|
|
|
||
ö |
|
D |
2 |
|
|
÷ |
+ 2Ey + F - |
|
= 0 |
||
A |
|||||
÷ |
|
|
|||
ø |
|
|
|
|
|
+ F* = 0 , |
|
|
(12) |
||
.
начало координат параллельно оси Ох в точку
æ |
- |
D |
;0 |
ö |
, т.е. перейдем к новым координатам по формулам x¢ = x + |
D |
, |
|
ç |
|
÷ |
|
|||||
A |
A |
|||||||
è |
|
|
ø |
|
|
y′ = y . Получим уравнение
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ax¢2 + 2Ey¢ + F* = 0 . |
|
|
|
|
|
|
(13) |
|||
|
|
|
Рассмотрим всевозможные случаи. |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
E ¹ 0 . Запишем уравнение (13) в виде: Ax¢2 + |
æ |
|
|
F * ö |
|||||||||||||||||
|
|
|
а) |
2E ç y¢ + |
|
|
÷ = 0 |
||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è |
|
|
2E ø |
|||
и |
|
перенесем |
|
начало |
координат |
параллельно |
оси |
O′y′ |
|
|
в |
точку |
|||||||||||||
æ |
0; - |
F * ö |
, т.е. перейдем к новым координатам (x′′; y′′) по формулам |
||||||||||||||||||||||
ç |
|
÷ |
|||||||||||||||||||||||
|
|||||||||||||||||||||||||
è |
|
|
2E ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
x |
¢¢ |
|
¢ |
y |
¢¢ |
= y |
¢ |
+ |
F * |
. |
Получим |
уравнение: |
Ax |
¢¢2 |
+ 2Ey |
¢¢ |
= 0 |
|
или |
||||||
|
2E |
|
|
|
|||||||||||||||||||||
|
= x , |
|
|
|
|
|
|
|
|||||||||||||||||
x¢¢2 = 2 py¢¢ |
æ |
|
|
|
E |
ö |
|
|
|
|
|
|
|
|
|
|
|||||||||
ç p |
= - |
|
|
÷ , которое будет каноническим уравнением пара- |
|||||||||||||||||||||
A |
|||||||||||||||||||||||||
|
|
|
|
|
|
è |
|
|
|
ø |
|
|
|
|
|
|
|
|
|
|
|||||
болы с осью симметрии O′′y′′ и вершиной в точке O′′ . б) Е = 0. Уравнение (13) имеет вид
147
Ax′2 + F* = 0 . |
F * |
(14) |
||
Если А и F* имеют разные знаки, то, полагая |
= −a2 , уравне- |
|||
A |
|
|||
|
|
|||
ние (14) запишем в виде (x′ − a)(x′ + a) = 0 , которое определяет пару
параллельных прямых.
В случае, когда A и F* одинакового знака, уравнение (14) можно
записать в виде x′2 + a2 = 0 и ему не удовлетворяют координаты ни одной точки плоскости. Оно называется уравнением пары мнимых параллельных прямых.
При F* = 0 уравнение (14) принимает вид x′2 = 0 и определяет ось O′y′ . Это уравнение определяет пару совпадающих прямых.
Обобщив рассмотренные случаи, можно сформулировать полу- ченные результаты в виде теоремы.
Теорема 1. Пусть в прямоугольной системе координат Оху задано общее уравнение линии второго порядка (4). Тогда существует такая прямоугольная система координат, в которой уравнение (4) принима- ет один из следующих девяти простейших (канонических) видов:
1) эллипс x2 + y2 =1; a2 b2
2) мнимый эллипс x2 + y2 = −1; a2 b2
3) пара мнимых пересекающихся прямых a2 x2 + c2 y2 = 0 ;
4) гипербола x2 − y2 =1; a2 b2
5)пара пересекающихся прямых a2 x2 − c2 y2 = 0 ;
6)парабола x2 = 2 py ;
7)пара параллельных прямых x2 − a2 = 0 ;
8)пара мнимых параллельных прямых x2 + a2 = 0 ;
9)пара совпадающих прямых x2 = 0 .
Вэтих формах х и у равноправны, т.е. их можно менять местами.
§15. Уравнение кривых второго порядка
вполярных координатах
148
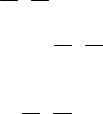
10. Общее свойство директрис эллипса и гиперболы. С помощью понятий директрисы и эксцентриситета (§11, §12) формулируется общее свойство, присущее эллипсу и гиперболе.
Утверждение 1. Отношение расстояния r от произвольной точки эллипса (гиперболы) до фокуса к расстоянию d от этой точки до соот- ветствующей директрисы есть постоянная величина, равная эксцен-
триситету эллипса (гиперболы), т.е. dr = ε .
Доказательство. Рассмотрим для эллипса правый фокус и пра- вую директрису. Пусть М(х; у) – произвольная точка эллипса (рис. 1).
|
|
Рис. 1 |
|
|
|
|
|
|
Рис.2 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|||
Тогда |
из (11.2), (11.4) |
получаем r = (x − c)2 + y2 = a − ε x . |
||||||||
Имеем d = |
a |
− x . Поэтому |
r |
= |
a − ε x |
= ε . |
||||
ε |
d |
|
||||||||
|
|
|
|
a |
|
|
|
|||
|
|
|
|
|
|
|
− x |
|
|
|
|
|
|
|
|
|
ε |
|
|
|
|
Для гиперболы (рис. 2) рассмотрим левый фокус и левую дирек- трису. Если М(х; у) – произвольная точка левой ветви гиперболы (рис. 2),
то r = −ε x − a, d = −x − |
a |
, |
r |
= |
−ε x − a |
= ε . |
|||
ε |
d |
−x − |
a |
||||||
|
|
|
|
||||||
|
|
|
|
|
ε |
|
|
||
Все остальные случаи рассматриваются аналогично. □ Отметим, что доказанное свойство эллипса и гиперболы можно
положить в основу общего определения этих линий: множество точек,
для которых отношение расстояний от фокуса до соответствующей директрисы является величиной постоянной, равной ε , есть эллипс, если ε <1 , и гипербола, если ε >1 .
Как следует из §13, таким же свойством определяется и парабола, если считать ε =1 .
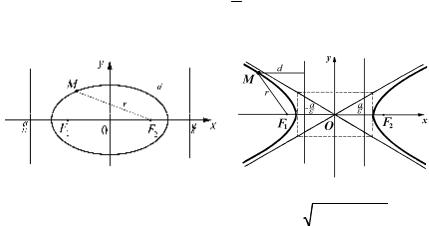
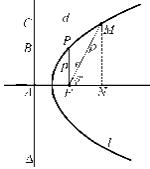
20. Уравнение эллипса, гиперболы, параболы в полярных координатах. Пусть l – дуга эллипса, гиперболы или параболы (рис.3). Если r – расстояние от произвольной точки М этой дуги до фокуса F, d – расстояние от нее до соответствующей директрисы , то из пункта 10 получаем, что
149
r |
= ε . |
(1) |
d
Проведем через фокус прямую, перпендикулярную директрисе . Пусть А – точка ее пересечения с директрисой, N – проекция точки М на эту прямую. Через точку F проведем перпендикуляр к прямой AN до пересечения с дугой l в точке Р, длину отрезка FP обозначим через р
и назовем ее фокальным параметром линии l . Пусть ρ и ϕ |
– полярные |
|||||||||||||||
|
|
координаты точки М, где F – полюс, а полярная |
||||||||||||||
|
|
ось направлена по |
|
|
. Тогда |
|
|
|
||||||||
FN |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
r = ρ , |
|
|
(2) |
||
|
|
|
|
|
d = CM = AN = AF + ρ cosϕ . |
(3) |
||||||||||
|
|
|
|
Запишем равенство (1) для точки Р: |
||||||||||||
|
|
|
FP |
= ε |
или |
|
p |
= ε , отсюда AF = |
p |
. |
|
|||||
|
|
|
|
|
|
|
||||||||||
|
|
|
BP |
|
|
AF |
ε |
|
||||||||
|
|
|
|
Значит, |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
d = |
p |
+ ρ cosϕ . |
|
|
(4) |
|||
|
Рис. 3 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
ε |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||
Подставив (2) и (4) в (1), после элементарных преобразований |
||||||||||||||||
получим |
|
p |
|
|
|
|||||||||||
|
|
|
|
ρ = |
|
|
|
|
||||||||
|
|
|
|
|
. |
|
|
(5) |
||||||||
|
|
|
|
1− ε cosϕ |
|
|
||||||||||
Уравнение (5) называется полярным уравнением эллипса, пара-
болы, гиперболы. В случае гиперболы это уравнение определяет одну из двух ее ветвей. Отметим, что для параболы параметр р в уравнении
(5) совпадает с ее параметром р из §13, а для эллипса и гиперболы
p = |
b2 |
. |
|
(6) |
|
a |
|
||||
|
|
|
16 |
|
|
Пример 1. Какую линию определяет уравнение |
ρ = |
|
|||
5 − 4cosϕ |
|
||||
в полярных координатах?
Решение. Разделив числитель и знаменатель правой части на 5,
|
|
16 |
|
|
||
приведем это уравнение к виду (5): ρ = |
|
|
5 |
|
. Следовательно, |
|
|
|
|
||||
1− |
4 |
cosϕ |
|
|||
5 |
|
|||||
|
|
|
|
|
||
150
ε = |
4 |
|
<1 . Данное уравнение определяет эллипс, причем из уравнений |
|||||||
5 |
|
|||||||||
|
|
|
|
b2 |
|
|
|
|
||
c |
= |
|
4 |
, |
= |
16 |
определяются его полуоси. □ |
|||
a |
|
5 |
a |
|
5 |
|||||
§ 16. Поверхности второго порядка
Общее уравнение поверхности второго порядка имеет следующий
вид:
F(x, y, z) = Ax2 + By2 + Cz2 + 2Dxy + 2Exz + 2Kyz + 2Gx + 2Ly + 2Mz + N = 0,
где A, B,..., N – любые заданные числа, но A, B, C, D, E, K одновре-
менно не равны нулю (A2 + B2 + C2 + D2 + E2 + K 2 ¹ 0) .
Как и для кривых второго порядка, можно показать, что для каждого уравнения указанного вида легко найти специальную декар- тову систему координат, в которой оно примет наиболее простой, так называемый, канонический вид, позволяющий исследовать форму этой поверхности.
После полного исследования всех возможных канонических уравнений можно убедиться, что существуют различные типы по- верхностей второго порядка, среди которых есть мнимые, а также распадающиеся на пару плоскостей. Ограничимся изучением вещест- венных поверхностей второго порядка.
10. Сфера. Точками сферы являются те, и только те точки пространства, расстояние от которых до заданной точки М равно R. В декартовой системе координат сфера, имеющая центр в точке M(a; b; c) и радиус R, определяется уравнением
(x - a)2 + (y - b)2 + (z - c)2 = R2 . |
(1) |
Если центр сферы находится в начале координат, то ее уравнение
имеет вид
x2 + y2 + z2 = R2 . |
(1′ ) |
Пример 1. Найти координаты центра и радиус сферы, заданной уравнением x2 + y2 + z2 - 2x + 2y + z +1 = 0 .
Решение. Приведем уравнение сферы к каноническому виду (1). Для этого дополним до полных квадратов члены, содержащие x, y, z, т.е. перепишем уравнение в виде
(x2 - 2x +1) + ( y2 + 2y +1) + (z2 + z + 14) -1-1- 14 +1 = 0 или (x -1)2 + (y +1)2 + (z + 12)2 = 54 .
151

|
æ |
|
|
1 |
ö |
|
|
Следовательно, центр сферы – точка |
M ç1; |
-1; |
- |
|
÷ |
, а ее радиус |
|
2 |
|||||||
|
è |
|
|
ø |
|
R = 25 . □
Пример 2. Составить уравнение сферы, проходящей через точки A(1;2;−4) , B(1;−3;1) и С(2;2;3), если ее центр находится в плоскости Оху.
Решение. Так как точки А, В, С принадлежат сфере (x - a)2 + (y - b)2 + (z - c)2 = R2 , центр которой находится в плоскости
Оху, то их координаты должны обращать искомое уравнение в тожде- ство и c = 0 . Поэтому, имеем систему уравнений:
ìï(1- a)2 + (2 - b)2 + (-4)2 = R2 ,
ïí(1- a)2 + (-3 - b)2 +12 = R2 , ïïî(2 - a)2 + (2 - b)2 + 32 = R2.
Отсюда
ì |
- a) |
2 |
+ (2 - b) |
2 |
+16 = (1- a) |
2 |
+ (3 + b) |
2 |
+1, |
||||
ï(1 |
|
|
|
|
|||||||||
í |
- a)2 |
+ (2 - b)2 |
+16 = (2 - a)2 + (2 - b)2 + 9, |
||||||||||
ï(1 |
|||||||||||||
î |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ì |
|
|
2 |
- (3 |
+ b) |
2 |
= -15, |
|
ì10b =10, |
|||
|
ï(2 - b) |
|
|
|
|||||||||
Þ í |
|
- a)2 - (2 |
- a)2 |
= -7, |
Þ í |
|
|
||||||
|
ï(1 |
|
î2a = -4. |
||||||||||
|
î |
|
|
|
|
|
|
|
|
|
|
|
|
Таким образом, a = −2, b =1. Следовательно, центр сферы – точка
M (−2;1;0) . Дальше находим R2 = (1- a)2 + (2 -b)2 +16 = 32 +12 +16 = 26 .
Итак, искомое уравнение сферы имеет вид (x + 2)2 + ( y -1)2 + z2 = 26 . □
20. Цилиндрические поверхности. Поверхность, описываемая прямой (образующей), движущейся вдоль некоторой линии (направ- ляющей) и остающейся параллельной некоторому заданному направ- лению, называется цилиндрической.
Уравнение вида F(x, y) = 0 в декартовой системе координат
в пространстве определяет цилиндрическую поверхность, у которой образующие параллельны оси Oz. Аналогично, уравнение F(x, z) = 0
определяет цилиндрическую поверхность с образующими параллель- ными оси Oy, а F(y, z) = 0 – цилиндрическую поверхность с обра-
зующими параллельными оси Ох.
Канонические уравнения цилиндров второго порядка:
эллиптический цилиндр
152