

Математика для инженеров(теория)I том
.pdfПроизвольное решение системы (1) получаем, если придадим
неизвестным xr+1, |
xr+2 , ..., xn |
произвольные |
числовые |
значения |
|||||
α1, α2 , ..., αn−r соответственно. |
|
|
|
|
|
|
|||
Тогда из (3) получим |
|
|
|
|
|
|
|
||
|
x0 |
= c |
α |
+ ... + c |
α |
, |
|
|
|
|
1 |
1 r+1 1 |
1n n−r |
|
|
|
|
||
|
x0 |
= c |
α |
+ ... + c |
α |
|
, |
|
|
|
2 |
2 r+1 1 |
|
2n n−r |
|
|
(5) |
||
|
..................................... , |
|
|
|
|||||
|
|
|
|
|
|||||
|
x0 |
= c |
α |
+ ... + c |
α |
|
. |
|
|
|
r |
r r+1 1 |
r n n−r |
|
|
|
|||
Используя |
(5), |
заключаем, |
что |
любое |
решение |
||||
x = (x10; x20;..., xr0; α1;K; αn−r ) |
системы (1) есть линейная комбинация |
||||||||
решений (4), т.е. |
|
|
|
|
|
|
|
|
|
x = α1x1 +α2 x2 + ... +αn−r xn−r . |
□ |
(6) |
|||||||
Из доказательства утверждения 2 непосредственно вытекает, что максимальное количество линейно независимых решений одно- родной системы равно n – r, где n – количество неизвестных, а r – ранг матрицы системы.
Совокупность максимального количества линейно независимых решений однородной системы (1) называют фундаментальной системой решений.
Ясно, что совокупность (4) является фундаментальной системой решений для (1).
С учетом (3), получаем следующий результат: любое решение
однородной системы линейных уравнений есть линейная комбинация решений фундаментальной системы.
На практике, при решении однородных систем линейных урав- нений в качестве значений свободных неизвестных выбирают, как правило, значения по столбцам единичной матрицы, т.к. это наиболее простой способ вычислений. Тогда получаем систему решений (4),
которую называют нормированной фундаментальной системой решений.
В этом случае общее решение данной системы однородных уравнений можно записать в виде (6).
Рассмотрим теперь неоднородную систему (6.1). Однородную систему (1) назовем соответствующей для неоднородной системы,
если она получается из системы (6.1) заменой свободных слагаемых
b1, b2 , K, bn нулями.
Рассмотрим совместную неоднородную систему (6.1), в которой r < n, где r – ранг ее матрицы А; n – количество неизвестных. В этом случае система (6.1) и соответствующая ей однородная система (1)
73
являются неопределенными. Выясним связь между решениями неод- нородной и соответствующей ей однородной системы.
Теорема 1. Каждое решение неопределенной неоднородной сис-
темы линейных уравнений есть сумма заданного частного решения этой системы и общего решения соответствующей ей однородной системы.
Доказательство. Пусть x = col(x1 ,K, xn ) – заданное частное
решение системы (6.1), а c = col(x10; x20 , K; xr0; α1;K;αn−r ) – общее
решение соответствующей ей однородной системы (1). Используем матричную запись систем (6.1) и (1).
Вектор-столбец x удовлетворяет уравнению Ax = b , а вектор- столбец с – уравнению Ax = 0 .
Имеем:
A (x + c) = Ax + Ac = b + 0 = b .
Таким образом, сумма решений x + c – решение неоднородной системы (6.1).
Пусть теперь вектор-столбец х – произвольное решение системы
(6.1). Тогда
0 = b - b = Ax - Ax = A(x - x ).
Отсюда заключаем, что x - x есть решение однородной систе- мы (1), т. е. x - x = c или x = x + c . □
Из теоремы 1 и формулы (6) получаем, что общее решение неопределенной неоднородной системы (6.1) можно задать формулой
x = x +α1x1 +α2 x2 +K +αn−r xn−r ,
где x1, K, xn−r – фундаментальная нормированная система решений
соответствующей однородной системы; α1, α2 , K,αn−r Î ; x – любое частное решение системы (6.1).
Задания для самостоятельной работы
1.Найти сумму матриц
æ |
2 |
5 |
7 |
ö |
|
æ |
1 |
4 |
2 |
ö |
ç |
3 |
-1 2 |
÷ |
, |
ç |
-2 3 |
1 |
÷ |
||
A = ç |
÷ |
B = ç |
÷ . |
|||||||
ç |
4 |
3 |
0 |
÷ |
|
ç |
2 |
-1 0 |
÷ |
|
è |
ø |
|
è |
ø |
||||||
74

2. |
Найти матрицу 3A + 8B , если |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
A = |
æ5 |
|
4 |
ö |
B |
æ 3 |
2ö |
|
|||||
|
|
|
|
|
ç |
|
3 |
÷, |
= ç |
-2 |
1 |
÷ . |
|
|||||
|
|
|
|
|
|
|
è1 |
|
ø |
|
è |
ø |
|
|||||
3. |
Найти произведение матриц AB и BA , если |
|
||||||||||||||||
|
|
|
|
|
æ1 |
3 |
|
1 |
ö |
|
æ 2 |
1 |
0ö |
|||||
|
|
|
|
|
ç |
2 0 4 |
÷ |
|
ç |
1 |
-1 2 |
÷ |
||||||
|
|
|
|
|
A = ç |
÷, B |
= ç |
÷ . |
||||||||||
|
|
|
|
|
ç |
1 |
2 |
|
3 |
÷ |
|
ç |
3 |
2 |
1 |
÷ |
||
|
|
|
|
|
è |
|
ø |
|
è |
ø |
||||||||
4. |
Найти |
A3 |
|
æ3 |
4 |
ö |
|
|
|
|
|
|
|
|
|
|||
, если A = ç |
2 |
÷ . |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
è1 |
ø |
|
|
|
|
|
|
|
|
|
|||
5. |
Найти значение матричного многочлена 3A2 + 2A + 7E при |
|||||||||||||||||
|
æ1 |
2 |
1ö |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
ç |
3 |
1 |
4 |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A = ç |
÷ , если E – единичная матрица третьего порядка. |
||||||||||||||||
|
ç |
5 |
1 |
1 |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è |
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
2 |
1 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
6. |
Вычислить определитель |
|
1 |
1 |
4 |
. |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
2 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-1 |
|
1 |
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
7. |
Вычислить определитель |
|
1 |
-1 |
1 |
|
1 |
|
. |
|
||||||||
|
|
|
|
|
|
|
|
|
1 |
|
1 |
-1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
1 |
|
-1 |
|
|
|
|
8.Пользуясь свойствами определителей, вычислить следующие опре- делители:
|
sin2 α |
1 |
cos2 α |
|
|
a) |
sin2 β |
1 |
cos2 |
β |
; |
|
sin2 γ |
1 |
cos2 |
γ |
|
1
9. Найти определитель 2
1
нений его элементов.
|
a + b c 1 |
|
|
|
|
x x1 |
ax + bx1 |
|
|
|
|
|
|
|
|||||||
б) |
b + c a 1 |
|
; |
в) |
|
y y1 |
ay + by1 |
|
. |
|
|
c + a b 1 |
|
|
|
|
z z1 |
az + bz1 |
|
|
|
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
5 |
1 |
и все девять алгебраических допол- |
||||||||
3 |
4 |
|
|
|
|
|
|
|
|
|
75
|
x |
x |
x |
|
4 |
x |
x |
|
10.Решить уравнения: а) |
2 |
-1 |
0 |
= 0 ; б) |
x |
4 |
x |
= 0 . |
|
7 |
4 |
5 |
|
x |
x |
4 |
|
11. Вычислить определители: |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
1 -2 3 4 |
|
|
|
10 |
2 |
0 |
0 |
|
0 |
|
1 |
+ a 1 |
1 |
1 |
|
||||||
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
||||||||||||||||||
|
|
|
|
12 |
10 |
2 |
0 |
|
0 |
|
|
|||||||||||
|
2 1 -4 3 |
|
|
|
|
|
|
1 1- a |
1 |
1 |
|
|||||||||||
|
, |
|
0 12 |
10 2 0 |
, |
|
. |
|||||||||||||||
|
3 -4 -1 -2 |
|
|
1 |
1 1+ b |
1 |
||||||||||||||||
|
4 3 2 -1 |
|
|
|
0 |
0 |
12 |
10 |
|
2 |
|
|
1 |
1 |
1 1- b |
|
||||||
|
|
|
|
0 |
0 |
0 |
12 |
|
10 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
12. Определить ранг следующих матриц: |
|
|
|
|
|
|
|
|
||||||||||||||
æ4 3 2 2 |
ö |
|
|
|
æ |
3 5 7ö |
|
|
|
æ0 2 0 0 |
ö |
|
|
|||||||||
ç |
0 2 1 1 |
÷ |
; |
|
|
ç |
1 2 3 |
÷ |
|
в) |
ç |
1 0 0 4 |
÷ |
|
|
|||||||
|
a) ç |
÷ |
|
|
б) ç |
÷ ; |
ç |
÷ . |
|
|
||||||||||||
ç |
0 2 3 3 |
÷ |
|
|
|
ç |
1 3 5 |
÷ |
|
|
|
ç |
0 0 3 0 |
÷ |
|
|
||||||
è |
ø |
|
|
|
è |
ø |
|
|
|
è |
ø |
|
|
|||||||||
13. Для данной матрицы А найти обратную матрицу |
A−1 |
методом |
||||||||||||||||||||
|
Гаусса и проверить, что AA−1 = A−1A = E : |
|
|
|
|
|
||||||||||||||||
|
|
æ1 |
6 |
1ö |
|
|
|
|
|
|
æ |
1 |
1 |
|
|
1ö |
|
|
|
|||
|
|
ç |
2 3 1 |
÷ |
; |
|
|
|
ç |
2 -1 2 |
÷ |
|
|
|
||||||||
|
a) A = ç |
÷ |
|
б) A = ç |
÷ . |
|
|
|
||||||||||||||
|
|
ç |
1 |
5 |
2 |
÷ |
|
|
|
|
|
|
ç |
4 |
1 |
|
|
3 |
÷ |
|
|
|
|
|
è |
ø |
|
|
|
|
|
|
è |
|
|
ø |
|
|
|
||||||
14.Пользуясь формулой Крамера, решить следующие системы урав- нений:
ì4x + 7y -13 = 0, |
ìx |
+ x |
+ 2x |
= -1, |
|
ï 1 |
2 |
3 |
|
||
а) í |
|
б) í2x1 - x2 + 2x3 = -4, |
|||
î5x - 3y + 9 |
= 0; |
ï4x + x + 4x = -2. |
|||
|
|
î |
1 |
2 |
3 |
15.Методом обратной матрицы решить следующие системы уравне- ний:
ìx |
+ x |
+ x = 5, |
||
ï |
1 |
2 |
3 |
|
а) í2x1 - x2 + x3 |
=10, |
|||
ïx |
+ x |
+ 2x |
= 20; |
|
î |
1 |
2 |
3 |
|
16. Решить методом Гаусса системы:
ì2x1 + 7x2 + 3x3 + x4 = 5, |
|||||
ïx + 3x + 5x - 2x = 3, |
|||||
ï |
1 |
2 |
3 |
4 |
|
а) í |
x |
+ 5x |
- 9x + 8x =1, |
||
ï |
|||||
1 |
2 |
3 |
4 |
||
ïî5x1 +18x2 + 4x3 + 5x4 =12;
ì2x |
- x |
+ x = 8, |
|||
ï |
1 |
2 |
|
3 |
|
б) í3x1 + 4x2 - x3 = -16, |
|||||
ï |
|
- 2x2 + x3 = 24. |
|||
î3x1 |
|||||
ìx1 + 3x2 + 2x3 = 0, |
|||||
ï2x |
- x |
+ 3x |
= 0, |
||
ï |
1 |
2 |
|
3 |
|
б) í |
|
- 5x2 + 4x3 = 0, |
|||
ï3x1 |
|||||
ïx |
+ 17x |
|
+ 4x = 0. |
||
î 1 |
|
2 |
|
3 |
|
76
17. Исследовать на совместность системы:
ì4x - 3x + 2x - x = 8, |
ì2x |
|||||
ï |
1 |
2 |
3 4 |
ï |
1 |
|
ï3x1 - 2x2 + x3 - 3x4 = 7, |
ï8x1 |
|||||
а) í |
2x |
- x - 5x = 6, |
б) í |
4x |
||
ï |
ï |
|||||
1 |
2 |
4 |
1 |
|||
ï |
|
- 3x2 + x3 - 8x4 =1; |
ï |
|
||
î5x1 |
î2x1 |
|||||
18. Найти все базисные решения систем:
+3x2 - x3 + x4 =1,
+12x2 - 9x3 + 8x4 = 3,
+6x2 + 3x3 - 2x4 = 3,
+3x2 + 9x3 - 7x4 = 3.
ì4x1 + x2 -12x3 + x4 = 6, |
ì5x |
+ x |
- x |
= 2, |
||||
ï |
1 |
2 |
3 |
|
||||
а) í |
+ x2 |
- 6x3 - x4 |
= 2; |
б) í10x + 2x - x = 7, |
||||
î2x1 |
ï |
|
1 |
2 |
3 |
|||
|
|
|
|
î5x1 |
+ x2 + x3 = 8. |
|||
77
ГЛАВА 2
МЕТОД КООРДИНАТ.
ВЕКТОРНАЯ АЛГЕБРА
§1. Декартова система координат на плоскости
ив пространстве
В основе метода координат лежит построение системы коорди- нат. Рассмотрим прямоугольную (или декартову) систему к о о р д и н а т .
10. Направленные отрезки на оси и их величины. Дадим поня-
тие направленного отрезка на оси. Рассмотрим произволь- ную прямую. На ней можно указать два взаимно противо- положных направления. Выберем одно из них и обозначим его стрелкой (рис. 1). Пусть, кроме того, выбрана единица масштаба для измерения длин отрезков.
Прямая, с выбранным на ней направлением, называ- е т с я о с ь ю .
Рассмотрим на оси две произвольные точки А и В. Отрезок с граничными точками А и В называется на-
правленным, если указано, какая из точек А или В считает- ся началом, а какая – концом отрезка.
Направленный отрезок с началом в точке А и концом в точке В обозначим AB и будем считать, что он направ-
лен от начала к концу. В записи AB букву, обозначающую на- чало отрезка, пишут первой, а букву, обозначающую его ко- нец, – второй.
Длиной направленного отрезка AB называют рас-
uuur
стояние между его концами и обозначают AB или AB .
Для направленного отрезка, лежащего на оси, введем понятие его величины.
Величиной АВ направленного отрезка AB называется
вещественное число, равное |
uuur |
, если направление отрезка и оси сов- |
AB |
||
78 |
|
|

падают, и равное |
− |
uuur |
, |
|
если эти направления противопо- |
||||||||||||||||||
AB |
|
||||||||||||||||||||||
ложны. |
|
|
|
|
|
|
uuur |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
Из |
определения |
|
|
|
следует, |
|
что |
AB = −BA и |
|||||||||||
|
|
|
|
|
|
AB |
|
|
|||||||||||||||
|
uuur |
|
= |
uuur |
обозначают одно и то же число. |
Пусть даны ка- |
|||||||||||||||||
|
AB |
|
BA |
||||||||||||||||||||
кая-нибудь ось, масштабная единица и точки А, В, С, D, |
|||||||||||||||||||||||
расположенные |
так, |
как показано |
на |
рис. |
2. |
Тогда |
|||||||||||||||||
|
AB = |
|
uuuur |
|
= 2, CD = − |
uuuur |
= −3, |
BA = − |
uuuur |
= −2 , DC = |
uuuuur |
= 3. |
|||||||||||
|
|
AB |
|
CD |
BA |
|
|
DC |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1 |
Рис. 2 |
Если точки А и В направленного отрезка AB совпадают, то
величина направленного отрезка AB равна нулю, а на- правление не определено. В дальнейшем направленные от- резки оси будем называть просто отрезками, опуская сло- во «направленный».
Основное тождество. Для любых трех точек А, В и С на оси величина отрезка AC равна сумме величин отрез-
к о в |
AB |
и |
BC , |
т . е . |
|
|
АВ + ВС=АС. |
(1) |
|
Для установления равенства (1) нужно рассмотреть все возможные случаи расположения точек А, В и С на оси.
Упражнение 1. Проверить равенство (1).
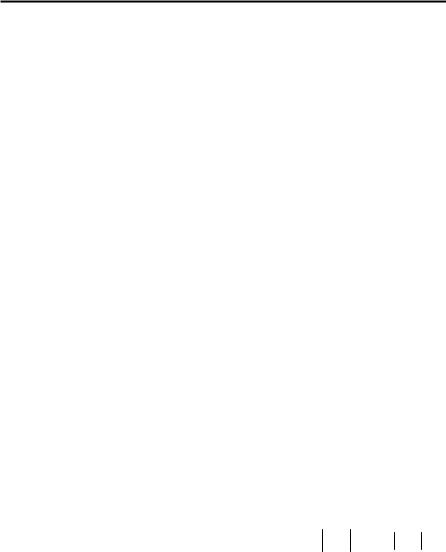
20. Прямоугольная система координат на плоскости. Две взаимно перпендикулярные оси Ох и Оу, имеющие общее начало О и одинаковую единицу масштаба (рис. 3), обра- зуют прямоугольную (или декартову) систему координат на плоскости.
Ось Ох называется осью абсцисс, ось Оу – осью ординат.
Точка О пересечения осей называется началом координат. Плоскость, в которой расположены оси Ох и Оу, называет-
ся координатной плоскостью и обозначается Оху.
Пусть М – произвольная точка плоскости. Опустим из нее перпен- дикуляры МА и МВ соответственно на оси Ох и Оу. Прямо-
угольными координатами х и у точки М будем называть
79
соответственно величины ОА и ОВ направленных отрезков
OA и OB : x = OA, y = OB.
Рис. 3 Рис. 4
Координаты х и у точки М называются, соответствен-
но, ее абсциссой и ординатой.
Тот факт, что точка М имеет координаты х и у, сим- волически обозначают М(х; у). При этом первой в скобках указы- вают абсциссу, а второй – ординату. Начало координат О и м е е т к о о р д и н а т ы ( 0 ; 0 ) .
Таким образом, при выбранной системе координат каждой точке М плоскости соответствует пара чисел (х; у) – ее прямо- угольные координаты и, обратно, каждой паре чисел (х; у) соответствует, и при этом только одна, точка М на плос- кости Оху такая, что ее абсцисса равна х, а ордината у. Значит, прямоугольная система координат на плоскости
устанавливает взаимно однозначное соответствие между множеством всех точек плоскости и множеством упорядо- ченных пар чисел, которое дает возможность при решении геометрических задач применять алгебраические методы.
Оси координат разбивают плоскость на четыре части, их называют
четвертями, квадрантами или координатными углами и нумеруют римскими цифрами I, II, III, IV так, как показано на рис. 4. На рис. 4 также указаны знаки координат точек в зависимости от их расположения в той или иной четверти.
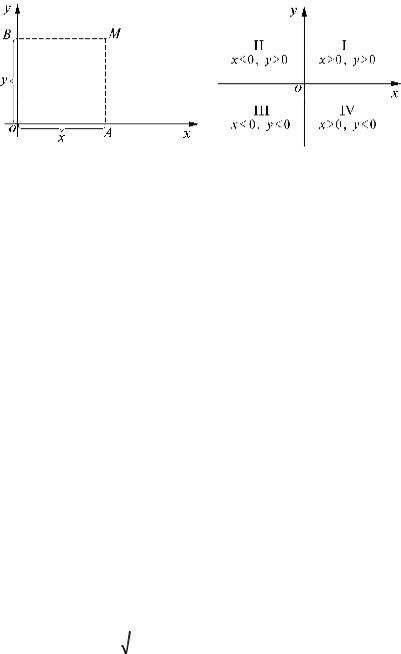
Рассмотрим задачу определения расстояния между двумя точками. Покажем, что для любых двух точек M1(x1; y1) и M2 (x2; y2 ) плоскости расстояние d между ними выражает-
ся формулой
|
|
|
|
|
|
|
|
d = (x |
− x )2 |
+ ( y |
2 |
− y )2 . |
(2) |
||
2 |
1 |
|
1 |
|
|
||
80
Для доказательства формулы (2) опустим из точек M1
|
и M2 перпендикуляры M1B и M2 A со- |
|||||||||||||||||
|
ответственно на оси Оу и Ох и обо- |
|||||||||||||||||
|
зн ач им |
че ре з |
К то ч ку |
|
пе ресе че н ия |
|||||||||||||
|
п р я м ы х M1B и M2 A ( р и с . 5 ) . |
|||||||||||||||||
|
|
|
|
Точка |
К имеет |
|
координаты |
|||||||||||
Рис. 5 |
(x2; y1) . |
Тогда: |
|
M1K |
|
= |
|
x2 − x1 |
|
; |
||||||||
|
|
|
|
|||||||||||||||
|
M2K |
|
= |
|
y2 − y1 |
|
. |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Так как треугольник M1M2K прямоугольный, то по |
|
теореме Пи- |
||||||||||||||||
фагора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d = M1M2 = 

 M1K 2 + M2K 2 =
M1K 2 + M2K 2 = 
 (x2 − x1)2 + ( y2 − y1)2 . □
(x2 − x1)2 + ( y2 − y1)2 . □
Пример 1. Найти расстояние между точками M1(−1;2) и M2 (4;3) . Решение. По формуле (2) находим
d = 
 (4 − (−1))2 + (3 − 2)2 =
(4 − (−1))2 + (3 − 2)2 = 
 26 . □
26 . □
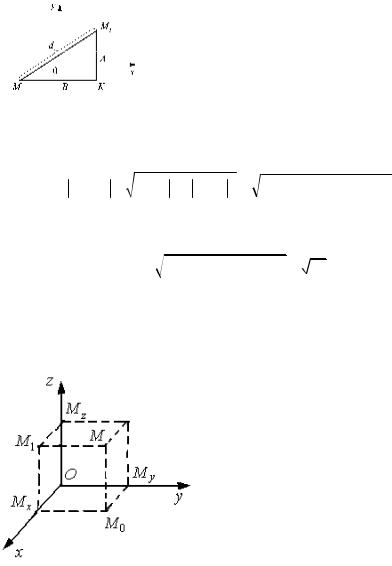
30. Декартова система координат в пространстве. Такая система координат Охуz определяется заданием масштабной единицы измерения
длин и трех пересекающихся в одной точке взаимно перпендикулярных осей: Ох, Оу, Оz. Точка О – начало координат, Ох – ось абсцисс, Оу – ось ординат, Оz – ось аппликат.
|
|
|
Пусть М – произвольная |
|
|
|
точка пространства (рис. 6). |
|
|
|
Опустим из точки М пер- |
|
|
|
п е н д и к у л я р ы MM0 ( н а п л о с - |
|
|
|
кость Оху) и MM1 (на плоскость |
|
|
|
О x z ) . И з т о ч к и M0 о п у с т и м |
|
|
|
перпендикуляры M0M x и M0M y |
|
|
|
соответственно на оси Ох и Оу, а из |
|
|
|
точки M1 опустим перпендику- |
|
|
|
л я р M1M z н а о с ь О z . П р я м о - |
|
Рис. 6 |
|
угольными координатами точки М |
|
|
|
|
называют числа x = OM x , |
y = OM y , z = OM z , при этом х называют |
||
абсциссой, у – ординатой, а z – аппликатой точки М.
При выбранной системе координат каждой точке М пространства соответствует единственная упорядоченная тройка чисел (х; у; z) (здесь х означает первое число, у – второе, z – третье) – ее декартовы координаты и, обратно,
81
каждой упорядоченной тройке чисел (х; у; z) соответству- ет, и притом одна, точка М в пространстве.
Таким образом, декартова система координат в про- странстве устанавливает взаимно однозначное соответст- вие между множеством всех точек пространства и множе- с т в о м у п о р я д о ч е н н ы х т р о е к ч и с е л .
Плоскости Оху, Оуz, Охz назовем координатными плоскостями. Они делят все пространство на восемь час- тей, называемых октантами.
40 . Параллельный перенос и его свойства. Напом-
ним, известное из школьного курса геометрии, понятие
п а р а л л е л ь н о г о |
п е р е н о с а . |
||||
Рассмотрим на плоскости (в пространстве) декартовы коорди- |
|||||
наты x, y (x, y, z) . |
Преобразование фигуры F , при котором |
||||
произвольная |
ее |
точка (x; y) ((x; y; z)) |
переходит |
в точку |
|
(x + x0; y + y0 ) |
((x + x0; y + y0; z + z0 )) , |
где |
x0 и y0 ( x0 , |
y0 и z0 ) |
|
− |
|
|
|
постоянные, |
|
называется параллельным переносом.
Название «параллельный перенос» можно объяснить тем, что при параллельном переносе точки смещаются по параллельным (или совпадающим) прямым на одно и то же расстояние.
Свойства параллельного переноса:
1)при параллельном переносе прямая переходит в параллельную прямую (или в себя);
2)каковы бы ни были две точки A и A′ существует и притом единственный параллельный перенос, при котором точка A
переходит в точку A′ .
Пусть на прямой задана точка А. Полупрямая или луч − это часть прямой, которая состоит из всех ее точек, ле- жащих по одну сторону от данной точки А, называемой начальной точкой полупрямой. Различные полупрямые од- ной прямой с общей начальной точкой А называются до-
полнительными.
Две полупрямые называют одинаково направленными, если суще- ствует параллельный перенос, который переводит одну полупря- мую в другую.
Две полупрямые называются противоположно на- правленными, если каждая из них одинаково направлена с полупрямой, дополнительной к другой.
82